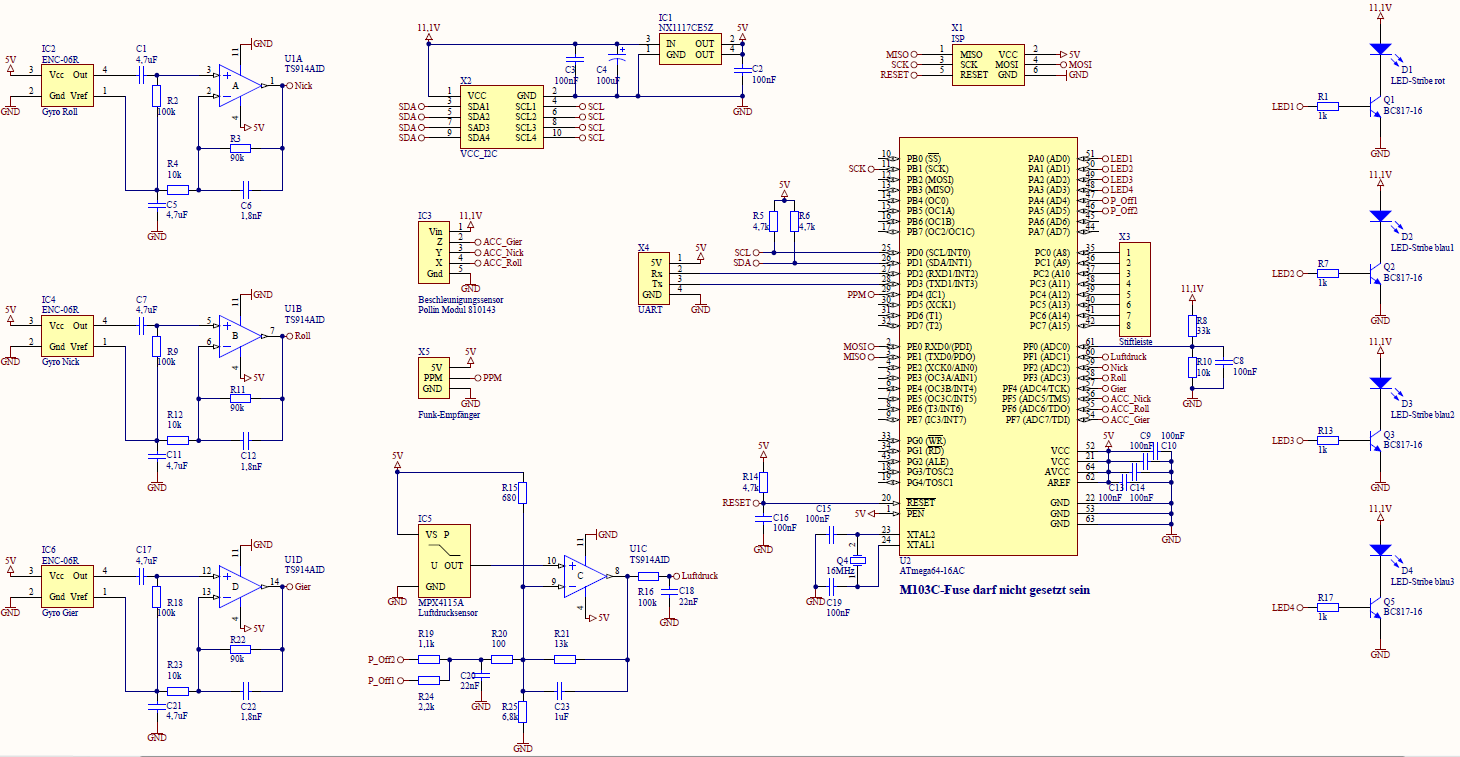
Hi! Im Anhang findet ihr den Schaltplan für die Flight Control meines Mikrokopters. Ich habe mich bei der Erstellung an den Projekten von mikrokopter.de und Ulrich Radig orientiert. Es wäre nett wenn ihr mal drüber schauen würdet. Danke im Voraus!
Angehängte Dateien:
-

mikrokopter.png
170 KB
Die hab ich wohl nur kopiert und nicht umbenannt... Ich werds ändern. Danke!
D1,D2,D3,D4 ohne Vorwiderstand. Wer geht da schneller kaputt, die LEDs oder der Transistor? Was ist X2?
Soweit ich weiß sind auf den LED-Stribes Vorwiderstände drauf, oder? X2 ist mein Stecker zum Anschließen der Akku-Spannung und der I2C Leitungen der Brushless-Treiber.
Naja, die 4,7uF und die 100k bilden laut Datenblatt einen Hochpass-Filter. Daher nehme ich an, dass die Gyros eine Wechselspannung liefern. Ist das nicht so?
>Daher nehme ich an, dass die Gyros eine Wechselspannung >liefern. Ist das nicht so? Das weiss ich nicht. Sonst hätte ich die Frage ja auch nicht gestellt. AREF wird nicht an VCC angeschlossen. 100n dran und sonst nichts, es sei den eine externe Referenzspannung. Immer wieder der gleiche Müll den man hier zu sehen bekommt.
Das mit den Gyros werde ich mir noch einmal übers Wochenende genau anschauen. Danke für die Info mit Aref, ich werds korrigieren. @ holger: Der Ton is allerdings nicht der Beste...
>@ holger: Der Ton is allerdings nicht der Beste...
Was hab ich denn jetzt schon wieder angestellt?
Angehängte Dateien:
-

flight_control.png
180 KB

So, ich habe jetzt noch ein bisschen was an der Beschaltung der Gyros geändert und eure Korrekturen eingepflegt. Könnt ihr jetzt nochmal über die Schaltung schauen?
>So, ich habe jetzt noch ein bisschen was an der Beschaltung der Gyros >geändert An Vref des Gyros muss nichts angeschlossen werden? Entschuldige bitte im voraus das ich schon wieder blöde Fragen stelle;)
;) Ich freue mich ja über Rückfragen - so findet man ja viell Fehler. Die Beschaltung der Gyros sollte jetzt aber stimmen, da ich sie von: http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=105131 übernommen habe.
>Ich freue mich ja über Rückfragen - so findet man ja viell Fehler. >Die Beschaltung der Gyros sollte jetzt aber stimmen, da ich sie von: Hmm, also ich sehe viele Labels mit Vref die an die Gyros und Aref des Atmega gehen. Gespeist wird Vref aus IC7.
Tu dir selbst einen riesigen Gefallen und lass die Finger von ENC03. Benutze was aktuelles, auf MEMS Basis.
schrammler schrieb: > Hi! > > Im Anhang findet ihr den Schaltplan für die Flight Control meines > Mikrokopters. Ich habe mich bei der Erstellung an den Projekten von > mikrokopter.de und Ulrich Radig orientiert. Es wäre nett wenn ihr mal > drüber schauen würdet. > Danke im Voraus! ich weiss ja jetzt nicht was Du erreichen möchtest, den bekannten Schaltplan abkupfern und wir sollen prüfen ob Du richtig abgekupfert hast oder möchtest Du etwas verbessern? Nebenbei bemerkt....da ist inzwischen ein 1284P drauf. Christian
Die Referenzspannung an den Gyros kommt AUS den Gyros. Stimmt also so, die wird nicht von außen zugeführt.
>Die Referenzspannung an den Gyros kommt AUS den Gyros. Stimmt also so, >die wird nicht von außen zugeführt. Ach Mist, nicht genau hingesehen. Vref ist VCC für die Gyros, also 3V.
> wir sollen prüfen ob Du richtig abgekupfert hast Es wird halt immer derselbe Käse abgekupfert: > ARef an VCC ist keine gute Idee Statt daß die Leute mal VERSTEHEN was die Teile machem. Du solltest VRef der ENC_06 nicht nur an den OpAmp führen, sondern vom uC mitmessen, denn er gibt dir den Nullpunkt an. (Nein, ich habe keine Ahnung wie die Auswertung am Besten ist, denn unter ENC_03 und ENC_06 finde ich kein Datenblatt im Netz). Dein grösstes Problem wird aber sein, daß die Schaltung gestört wird von den Motoren, und das hat mit Stromversorgung, Aufbau und Masse/Versorgungsleitungsführung zu tun die du bisher nicht hast.
Nein, Vref ist nicht Vcc für die Gyros. Die Schaltung mit dem Hochpass war richtig. Aus Vref kommt in etwa Vcc/2 raus - um den Punkt eiert das Signal rum, je nach Stärke der Bewegung.
>Statt daß die Leute mal VERSTEHEN was die Teile machem. Da ist was Wahres dran. Die Typen jedenfalls, die den Mikrokopter zusammengebastelt haben, haben beispielsweise den Sinn von Abblockkondensatoren an Spg.reglern nicht verstanden. Und die Schaltung mit dem Luftdrucksensor funktioniert bei vielen Leuten nicht wirklich (Forum!), die Bauelementeauswahl ist, wenn das Ding sich wirklich in der Luft hält und sich um max 30cm bewegen soll, einfach kacke weil bspw. die PWM + 5%-Widersände viel zu grob sind für den Subtrahierer und den 10bit ADC gar nicht vollständig überstreichen. Von der Einschaltdrift der sich über 10 Min hinzieht will ich mal gar nicht reden. Ich hab das Projekt so gut wie begraben. Für mich ist das Ding ein Lehrbeispiel für misslungenes Innovations- und Projektmanagement. Veraltete Bauteile, Geheimniskrämerei im Source der nur teilweise veröffentlicht ist, völlig verwahrloster und vandalisierter Code des Umrichters im SVN der aussieht als ob sich der 14-jährige Kevin aus Marzahn daran versucht hätte. Die Ermittlung der Back-EMF wurde wohl aus merkantilen Gründen nicht veröffentlicht und als Eigentum des Entwicklers betrachtet - obwohl ich mir ziemlich sicher bin daß sie diesen hochkomplexe Rechenmodell für die Kommutierung ... ach was solls. - Nee du, an mir verdienen die Burschen kein Geld mehr. Ich habe auf Ardupilot 2.0 gewechselt. Doppelt so große CPU, schnelleres GPS (10! updates/sek) volldigitaler Höhensensor, alle sechs Achsen in einem Device, komplett Open Source, keine Spezial-ESCs nötig... und das Beste: Halber Preis.
Erstmal Vielen Dank für die vielen Antworten! Mir ist jetzt aber unklar welche Beschaltung der Gyros die Bessere ist. Die Erste steht ja im Datenblatt und die Zweite ist direkt von der Mikrokopter-Seite und somit schon erprobt. Ich tendiere daher im Moment eher zu der Zweiten. Sehe ich das richtig? @MaWin: Dafür habe ich leider keine ADC-Pins mehr frei. @ Simon K. : Was genau ist so schlecht an dem ENC-03? (Ich setze das erste Mal Gyros ein) Ich habe bereits gelesen, dass der einen Temperaturdrift hat. Aber der wird ja mit Hilfe des DAC beseitigt. Den ADXRS620 bekomme ich auch bei weitem nicht so gut auf die Platine gelötet und müsste mir Adapterplatinen bestellen. Außerdem ist der ja noch ein Stückchen teurer. Lohnt sich das wirklich? @ Joachim: Wenn ich alles selber baue verdienen die an mir auch nicht viel. ;)
Joachim ... schrieb: > Ich hab das Projekt so gut wie begraben. Für mich ist das Ding ein > Lehrbeispiel für misslungenes Innovations- und Projektmanagement. > Veraltete Bauteile, Geheimniskrämerei im Source der nur teilweise Du vergisst dabei das die Entwicklung der Plattform schon etliche Jahre zurückliegt und wahrscheinlich <1000 Systeme, wenn nicht mehr, im Einsatz sind. Da muss man auch einen Investitionsschutz bieten und die Software für die bestehenden Systeme weiterentwickeln. Im Laufe der Zeit dann bessere Bauteile einzubauen und jedesmal neue FC's zu machen nur weil Bauteil XY bessere Werte hat, erhöht den Pflegeaufwand für die Software ungemein. Und mal im Ernst, glaubst Du wirklich das die Probleme so gravierend sind wie Du sie beschreibst? Mit der MK Hardware/Software verdienen sich inzwischen etliche ihr täglich Brot, indem sie sie nutzen für Film und Fotoaufnahmen. Wenn man was komplett neu macht, wie Ardupilot, kann man auf derzeit aktuelle Bauteile zurückgreifen, dann kann man leicht kacken, wir sehen uns in 6 Jahren wieder, mal sehen wie Ardupilot dann noch dasteht.... Deshalb verstehe ich auch nicht so ganz warum der TO sich nicht mit einer aktuellen Hardware beschäftigt. Oder möchte er unbedingt die Mikrokopter FC Leiterplatte nachbauen und mit der Originalsoftware fliegen? Das geht auch einfacher. Christian
Nein ich möchte nicht unbedingt die FC Leiterplatte nachbauen. Ich möchte eigentlich nur sicher sein das die Hardware zum Fliegen geeignet ist und ich nicht am Ende einen Haufen Geld für die falschen Sensoren ausgegeben habe. Ok, dann werf ich die Idee mit den ENC-03 über den Haufen. Was haltet Ihr denn von einer IMU mit einem ITG3200 und einem BMA180. Wären die geeignet um einen Mikrokopter zu steuern? Dann könnte ich ja direkt das Bord hier bestellen: http://webcache.googleusercontent.com/search?q=cache:EahrLotPLf8J:www.drotek.fr/shop/en/32-imu-6dof-itg3200-gyro-bma180-accelerometer-sensor.html+6DOF+v2+IMU&cd=3&hl=de&ct=clnk&gl=de
Joachim ... schrieb: >>Statt daß die Leute mal VERSTEHEN was die Teile machem. > Da ist was Wahres dran. Erstaunlicherweise kann ich dir ganz gut zustimmen. Als ich damals Inspiration für mein eigenes (komplett selbstgebautes) Quadrokopter Projekt gesucht habe, war der Mikrokopter immer eher ein Beispiel, wie man es nicht machen sollte. Probleme in der Hardware hast du ja sehr gut dargestellt. Dazu bin ich der Meinung, dass die ENC03 Gyros für den Zweck völligst ungeeignet sind, da es in der heutigen Zeit für weniger Geld schon gute, driftkompensierte MEMS Gyros gibt. Die ENC03 Gyros haben bei mir schon verrückt gespielt, wenn ich von drinnen nach draußen gegangen bin. Da war nix mehr zu holen. Der Sourcecode ist tatsächlich Geheimniskrämerei. Sowas chaotisches habe ich noch nie gesehen :-) Erstaunlich eigentlich, dass DAS funktioniert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.