Ich habe ein kleines Problem mit der Einbindung der RobotArmBaseLib.h unter WinAVR-20090313. Obwohl es ist ein Beispielprogramm aus dem Manuel, funktioniert Trotzdem nicht und das Compiler spuckt was raus!! Mein Quellcode: #include "RobotArmBaseLib.h" int main(void) { initRobotBase(); // Always call this first! The Processor will not work // correctly otherwise. while(true) { // --------------------------------------- // Led and Beeper: changeBeepsound(250); // Change beepsound setBeepsound(); // Beeper on setLEDs(0b1001); // Set LEDs mSleep(500); // delay 500ms = 0.5s changeBeepsound(200); // Change beepsound setLEDs(0b0110); // mSleep(500); // delay 500ms = 0.5s changeBeepsound(100); // Change beepsound setLEDs(0b1111); // mSleep(500); // delay 500ms = 0.5s setLEDs(0b0000); clearBeepsound(); // Beeper off mSleep(1000); // delay 500ms = 0.5s } return 0; } Mein neuer Fehler: C:\Users\Admin\Desktop\PROPRO/ledblink.c:7: undefined reference to `initRobotBase' C:\Users\Admin\Desktop\PROPRO/ledblink.c:16: undefined reference to `changeBeepsound' C:\Users\Admin\Desktop\PROPRO/ledblink.c:17: undefined reference to `setBeepsound' C:\Users\Admin\Desktop\PROPRO/ledblink.c:18: undefined reference to `setLEDs' C:\Users\Admin\Desktop\PROPRO/ledblink.c:19: undefined reference to `mSleep' C:\Users\Admin\Desktop\PROPRO/ledblink.c:21: undefined reference to `changeBeepsound' C:\Users\Admin\Desktop\PROPRO/ledblink.c:22: undefined reference to `setLEDs' C:\Users\Admin\Desktop\PROPRO/ledblink.c:23: undefined reference to `mSleep' C:\Users\Admin\Desktop\PROPRO/ledblink.c:25: undefined reference to `changeBeepsound' C:\Users\Admin\Desktop\PROPRO/ledblink.c:26: undefined reference to `setLEDs' C:\Users\Admin\Desktop\PROPRO/ledblink.c:27: undefined reference to `mSleep' C:\Users\Admin\Desktop\PROPRO/ledblink.c:29: undefined reference to `setLEDs' C:\Users\Admin\Desktop\PROPRO/ledblink.c:30: undefined reference to `clearBeepsound' C:\Users\Admin\Desktop\PROPRO/ledblink.c:31: undefined reference to `mSleep' Habe bis jetzt unter winAvr Programmer's Notepad mit Atmega64 zu tun gehabt und da nur mit den Standart Libs avr/io.h usw. Der Fehler heißt doch das er die Befehle aus der RobotArmBaseLib nicht einbindet. bzw nicht kennt. hat Jemand eine Lösung?
Du musst das *.c file der 'RobotArmBaselib' mit in den Kompilierprozess einbinden.
:
Bearbeitet durch User
# Hey Emacs, this is a -*- makefile -*- #----------------------------------------------------------------------- ----- # WinAVR Makefile Template written by Eric B. Weddington, Jörg Wunsch, et al. # # Released to the Public Domain # # Additional material for this makefile was written by: # Peter Fleury # Tim Henigan # Colin O'Flynn # Reiner Patommel # Markus Pfaff # Sander Pool # Frederik Rouleau # Carlos Lamas # #----------------------------------------------------------------------- ----- # On command line: # # make all = Make software. # # make clean = Clean out built project files. # # make coff = Convert ELF to AVR COFF. # # make extcoff = Convert ELF to AVR Extended COFF. # # make program = Download the hex file to the device, using avrdude. # Please customize the avrdude settings below first! # # make debug = Start either simulavr or avarice as specified for debugging, # with avr-gdb or avr-insight as the front end for debugging. # # make filename.s = Just compile filename.c into the assembler code only. # # make filename.i = Create a preprocessed source file for use in submitting # bug reports to the GCC project. # # To rebuild project do "make clean" then " # MCU name MCU = atmega64 # Processor frequency. # This will define a symbol, F_CPU, in all source code files equal to the # processor frequency. You can then use this symbol in your source code to # calculate timings. Do NOT tack on a 'UL' at the end, this will be done # automatically to create a 32-bit value in your source code. # Typical values are: # F_CPU = 1000000 # F_CPU = 1843200 # F_CPU = 2000000 # F_CPU = 3686400 # F_CPU = 4000000 # F_CPU = 7372800 # F_CPU = 8000000 # F_CPU = 11059200 # F_CPU = 14745600 # F_CPU = 16000000 # F_CPU = 18432000 # F_CPU = 20000000 F_CPU = 16000000 # Output format. (can be srec, ihex, binary) FORMAT = ihex # Target file name (without extension). TARGET = ledblink ######################################################################## ####### # Specify relative path to RobotArm library files here. CAT_LIB_PATH=../../RobotArmLib CAT_LIB_PATH_OTHERS= $(CAT_LIB_PATH)/RobotArmBase $(CAT_LIB_PATH)/RobotArmI2C # Object files directory # To put object files in current directory, use a dot (.), do NOT make # this an empty or blank macro! OBJDIR = . # List C source files here. (C dependencies are automatically generated.) SRC = $(TARGET).c ######################################################################## ####### # If there is more than one source file, append them here separated by spaces. # Usually you have to add the Library files here! (ONLY add c files "*.c" here, # NO header files "*.h"!) # Don't forget to add relative paths! SRC += $(CAT_LIB_PATH)/RobotArmBase/RobotArmBaseLib.c SRC += $(CAT_LIB_PATH)/RobotArmBase/RobotArmUart.c # List C++ source files here. (C dependencies are automatically generated.) CPPSRC = # List Assembler source files here. # Make them always end in a capital .S. Files ending in a lowercase .s # will not be considered source files but generated files (assembler # output from the compiler), and will be deleted upon "make clean"! # Even though the DOS/Win* filesystem matches both .s and .S the same, # it will preserve the spelling of the filenames, and gcc itself does # care about how the name is spelled on its command-line. ASRC = # Optimization level, can be [0, 1, 2, 3, s]. # 0 = turn off optimization. s = optimize for size. # (Note: 3 is not always the best optimization level. See avr-libc FAQ.) OPT = s # Debugging format. # Native formats for AVR-GCC's -g are dwarf-2 [default] or stabs. # AVR Studio 4.10 requires dwarf-2. # AVR [Extended] COFF format requires stabs, plus an avr-objcopy run. DEBUG = dwarf-2 # List any extra directories to look for include files here. # Each directory must be seperated by a space. # Use forward slashes for directory separators. # For a directory that has spaces, enclose it in quotes. EXTRAINCDIRS = $(CAT_LIB_PATH) $(CAT_LIB_PATH_OTHERS) # Compiler flag to set the C Standard level. # c89 = "ANSI" C # gnu89 = c89 plus GCC extensions # c99 = ISO C99 standard (not yet fully implemented) # gnu99 = c99 plus GCC extensions CSTANDARD = -std=gnu99 # Place -D or -U options here for C sources CDEFS = -DF_CPU=$(F_CPU)UL # Place -D or -U options here for ASM sources ADEFS = -DF_CPU=$(F_CPU) # Place -D or -U options here for C++ sources CPPDEFS = -DF_CPU=$(F_CPU)UL #CPPDEFS += -D__STDC_LIMIT_MACROS #CPPDEFS += -D__STDC_CONSTANT_MACROS #---------------- Compiler Options C ---------------- # -g*: generate debugging information # -O*: optimization level # -f...: tuning, see GCC manual and avr-libc documentation # -Wall...: warning level # -Wa,...: tell GCC to pass this to the assembler. # -adhlns...: create assembler listing CFLAGS = -g$(DEBUG) CFLAGS += $(CDEFS) CFLAGS += -O$(OPT) CFLAGS += -funsigned-char CFLAGS += -funsigned-bitfields CFLAGS += -fpack-struct CFLAGS += -fshort-enums CFLAGS += -Wall CFLAGS += -Wstrict-prototypes #CFLAGS += -mshort-calls #CFLAGS += -fno-unit-at-a-time #CFLAGS += -Wundef #CFLAGS += -Wunreachable-code #CFLAGS += -Wsign-compare CFLAGS += -Wa,-adhlns=$(<:%.c=$(OBJDIR)/%.lst) CFLAGS += $(patsubst %,-I%,$(EXTRAINCDIRS)) CFLAGS += $(CSTANDARD) #---------------- Compiler Options C++ ---------------- # -g*: generate debugging information # -O*: optimization level # -f...: tuning, see GCC manual and avr-libc documentation # -Wall...: warning level # -Wa,...: tell GCC to pass this to the assembler. # -adhlns...: create assembler listing CPPFLAGS = -g$(DEBUG) CPPFLAGS += $(CPPDEFS) CPPFLAGS += -O$(OPT) CPPFLAGS += -funsigned-char CPPFLAGS += -funsigned-bitfields CPPFLAGS += -fpack-struct CPPFLAGS += -fshort-enums CPPFLAGS += -fno-exceptions CPPFLAGS += -Wall CPPFLAGS += -Wundef #CPPFLAGS += -mshort-calls #CPPFLAGS += -fno-unit-at-a-time #CPPFLAGS += -Wstrict-prototypes #CPPFLAGS += -Wunreachable-code #CPPFLAGS += -Wsign-compare CPPFLAGS += -Wa,-adhlns=$(<:%.cpp=$(OBJDIR)/%.lst) CPPFLAGS += $(patsubst %,-I%,$(EXTRAINCDIRS)) #CPPFLAGS += $(CSTANDARD) #---------------- Assembler Options ---------------- # -Wa,...: tell GCC to pass this to the assembler. # -adhlns: create listing # -gstabs: have the assembler create line number information; note that # for use in COFF files, additional information about filenames # and function names needs to be present in the assembler source # files -- see avr-libc docs [FIXME: not yet described there] # -listing-cont-lines: Sets the maximum number of continuation lines of hex # dump that will be displayed for a given single line of source input. ASFLAGS = $(ADEFS) -Wa,-adhlns=$(<:%.S=$(OBJDIR)/%.lst),-gstabs,--listing-cont-lines=100 #---------------- Library Options ---------------- # Minimalistic printf version PRINTF_LIB_MIN = -Wl,-u,vfprintf -lprintf_min # Floating point printf version (requires MATH_LIB = -lm below) PRINTF_LIB_FLOAT = -Wl,-u,vfprintf -lprintf_flt # If this is left blank, then it will use the Standard printf version. PRINTF_LIB = #PRINTF_LIB = $(PRINTF_LIB_MIN) #PRINTF_LIB = $(PRINTF_LIB_FLOAT) # Minimalistic scanf version SCANF_LIB_MIN = -Wl,-u,vfscanf -lscanf_min # Floating point + %[ scanf version (requires MATH_LIB = -lm below) SCANF_LIB_FLOAT = -Wl,-u,vfscanf -lscanf_flt # If this is left blank, then it will use the Standard scanf version. SCANF_LIB = #SCANF_LIB = $(SCANF_LIB_MIN) #SCANF_LIB = $(SCANF_LIB_FLOAT) MATH_LIB = -lm # List any extra directories to look for libraries here. # Each directory must be seperated by a space. # Use forward slashes for directory separators. # For a directory that has spaces, enclose it in quotes. EXTRALIBDIRS = #---------------- External Memory Options ---------------- # 64 KB of external RAM, starting after internal RAM (ATmega128!), # used for variables (.data/.bss) and heap (malloc()). #EXTMEMOPTS = -Wl,-Tdata=0x801100,--defsym=__heap_end=0x80ffff # 64 KB of external RAM, starting after internal RAM (ATmega128!), # only used for heap (malloc()). #EXTMEMOPTS = -Wl,--section-start,.data=0x801100,--defsym=__heap_end=0x80ffff EXTMEMOPTS = #---------------- Linker Options ---------------- # -Wl,...: tell GCC to pass this to linker. # -Map: create map file # --cref: add cross reference to map file LDFLAGS = -Wl,-Map=$(TARGET).map,--cref LDFLAGS += $(EXTMEMOPTS) LDFLAGS += $(patsubst %,-L%,$(EXTRALIBDIRS)) LDFLAGS += $(PRINTF_LIB) $(SCANF_LIB) $(MATH_LIB) #LDFLAGS += -T linker_script.x #---------------- Programming Options (avrdude) ---------------- # Programming hardware # Type: avrdude -c ? # to get a full listing. # AVRDUDE_PROGRAMMER = stk500v2 # com1 = serial port. Use lpt1 to connect to parallel port. AVRDUDE_PORT = com1 # programmer connected to serial device AVRDUDE_WRITE_FLASH = -U flash:w:$(TARGET).hex #AVRDUDE_WRITE_EEPROM = -U eeprom:w:$(TARGET).eep # Uncomment the following if you want avrdude's erase cycle counter. # Note that this counter needs to be initialized first using -Yn, # see avrdude manual. #AVRDUDE_ERASE_COUNTER = -y # Uncomment the following if you do not wish a verification to be # performed after programming the device. #AVRDUDE_NO_VERIFY = -V # Increase verbosity level. Please use this when submitting bug # reports about avrdude. See <http://savannah.nongnu.org/projects/avrdude>; # to submit bug reports. #AVRDUDE_VERBOSE = -v -v AVRDUDE_FLAGS = -p $(MCU) -P $(AVRDUDE_PORT) -c $(AVRDUDE_PROGRAMMER) AVRDUDE_FLAGS += $(AVRDUDE_NO_VERIFY) AVRDUDE_FLAGS += $(AVRDUDE_VERBOSE) AVRDUDE_FLAGS += $(AVRDUDE_ERASE_COUNTER) #---------------- Debugging Options ---------------- # For simulavr only - target MCU frequency. DEBUG_MFREQ = $(F_CPU) # Set the DEBUG_UI to either gdb or insight. # DEBUG_UI = gdb DEBUG_UI = insight # Set the debugging back-end to either avarice, simulavr. DEBUG_BACKEND = avarice #DEBUG_BACKEND = simulavr # GDB Init Filename. GDBINIT_FILE = __avr_gdbinit # When using avarice settings for the JTAG JTAG_DEV = /dev/com1 # Debugging port used to communicate between GDB avarice simulavr. DEBUG_PORT = 4242 # Debugging host used to communicate between GDB avarice simulavr, normally # just set to localhost unless doing some sort of crazy debugging when # avarice is running on a different computer. DEBUG_HOST = localhost #======================================================================= ===== # Define programs and commands. SHELL = sh CC = avr-gcc OBJCOPY = avr-objcopy OBJDUMP = avr-objdump SIZE = avr-size AR = avr-ar rcs NM = avr-nm AVRDUDE = avrdude REMOVE = rm -f REMOVEDIR = rm -rf COPY = cp WINSHELL = cmd # Define Messages # English MSG_ERRORS_NONE = Errors: none MSG_BEGIN = -------- begin -------- MSG_END = -------- end -------- MSG_SIZE_BEFORE = Size before: MSG_SIZE_AFTER = Size after: MSG_COFF = Converting to AVR COFF: MSG_EXTENDED_COFF = Converting to AVR Extended COFF: MSG_FLASH = Creating load file for Flash: MSG_EEPROM = Creating load file for EEPROM: MSG_EXTENDED_LISTING = Creating Extended Listing: MSG_SYMBOL_TABLE = Creating Symbol Table: MSG_LINKING = Linking: MSG_COMPILING = Compiling C: MSG_COMPILING_CPP = Compiling C++: MSG_ASSEMBLING = Assembling: MSG_CLEANING = Cleaning project: MSG_CREATING_LIBRARY = Creating library: # Define all object files. OBJ = $(SRC:%.c=$(OBJDIR)/%.o) $(CPPSRC:%.cpp=$(OBJDIR)/%.o) $(ASRC:%.S=$(OBJDIR)/%.o) # Define all listing files. LST = $(SRC:%.c=$(OBJDIR)/%.lst) $(CPPSRC:%.cpp=$(OBJDIR)/%.lst) $(ASRC:%.S=$(OBJDIR)/%.lst) # Compiler flags to generate dependency files. GENDEPFLAGS = -MMD -MP -MF .dep/$(@F).d # Combine all necessary flags and optional flags. # Add target processor to flags. ALL_CFLAGS = -mmcu=$(MCU) -I. $(CFLAGS) $(GENDEPFLAGS) ALL_CPPFLAGS = -mmcu=$(MCU) -I. -x c++ $(CPPFLAGS) $(GENDEPFLAGS) ALL_ASFLAGS = -mmcu=$(MCU) -I. -x assembler-with-cpp $(ASFLAGS) # Default target. all: begin gccversion sizebefore build sizeafter end # Change the build target to build a HEX file or a library. build: elf hex eep #lss sym #build: lib elf: $(TARGET).elf hex: $(TARGET).hex eep: $(TARGET).eep #lss: $(TARGET).lss #sym: $(TARGET).sym LIBNAME=lib$(TARGET).a lib: $(LIBNAME) # Eye candy. # AVR Studio 3.x does not check make's exit code but relies on # the following magic strings to be generated by the compile job. begin: @echo @echo $(MSG_BEGIN) end: @echo $(MSG_END) @echo # Display size of file. HEXSIZE = $(SIZE) --target=$(FORMAT) $(TARGET).hex ELFSIZE = $(SIZE) --mcu=$(MCU) --format=avr $(TARGET).elf sizebefore: @if test -f $(TARGET).elf; then echo; echo $(MSG_SIZE_BEFORE); $(ELFSIZE); \ 2>/dev/null; echo; fi sizeafter: @if test -f $(TARGET).elf; then echo; echo $(MSG_SIZE_AFTER); $(ELFSIZE); \ 2>/dev/null; echo; fi # Display compiler version information. gccversion : @$(CC) --version # Program the device. program: $(TARGET).hex $(TARGET).eep $(AVRDUDE) $(AVRDUDE_FLAGS) $(AVRDUDE_WRITE_FLASH) $(AVRDUDE_WRITE_EEPROM) # Generate avr-gdb config/init file which does the following: # define the reset signal, load the target file, connect to target, and set # a breakpoint at main(). gdb-config: @$(REMOVE) $(GDBINIT_FILE) @echo define reset >> $(GDBINIT_FILE) @echo SIGNAL SIGHUP >> $(GDBINIT_FILE) @echo end >> $(GDBINIT_FILE) @echo file $(TARGET).elf >> $(GDBINIT_FILE) @echo target remote $(DEBUG_HOST):$(DEBUG_PORT) >> $(GDBINIT_FILE) ifeq ($(DEBUG_BACKEND),simulavr) @echo load >> $(GDBINIT_FILE) endif @echo break main >> $(GDBINIT_FILE) debug: gdb-config $(TARGET).elf ifeq ($(DEBUG_BACKEND), avarice) @echo Starting AVaRICE - Press enter when "waiting to connect" message displays. @$(WINSHELL) /c start avarice --jtag $(JTAG_DEV) --erase --program --file \ $(TARGET).elf $(DEBUG_HOST):$(DEBUG_PORT) @$(WINSHELL) /c pause else @$(WINSHELL) /c start simulavr --gdbserver --device $(MCU) --clock-freq \ $(DEBUG_MFREQ) --port $(DEBUG_PORT) endif @$(WINSHELL) /c start avr-$(DEBUG_UI) --command=$(GDBINIT_FILE) # Convert ELF to COFF for use in debugging / simulating in AVR Studio or VMLAB. COFFCONVERT = $(OBJCOPY) --debugging COFFCONVERT += --change-section-address .data-0x800000 COFFCONVERT += --change-section-address .bss-0x800000 COFFCONVERT += --change-section-address .noinit-0x800000 COFFCONVERT += --change-section-address .eeprom-0x810000 coff: $(TARGET).elf @echo @echo $(MSG_COFF) $(TARGET).cof $(COFFCONVERT) -O coff-avr $< $(TARGET).cof extcoff: $(TARGET).elf @echo @echo $(MSG_EXTENDED_COFF) $(TARGET).cof $(COFFCONVERT) -O coff-ext-avr $< $(TARGET).cof # Create final output files (.hex, .eep) from ELF output file. %.hex: %.elf @echo @echo $(MSG_FLASH) $@ $(OBJCOPY) -O $(FORMAT) -R .eeprom -R .fuse -R .lock $< $@ %.eep: %.elf @echo @echo $(MSG_EEPROM) $@ -$(OBJCOPY) -j .eeprom --set-section-flags=.eeprom="alloc,load" \ --change-section-lma .eeprom=0 --no-change-warnings -O $(FORMAT) $< $@ || exit 0 # Create extended listing file from ELF output file. %.lss: %.elf @echo @echo $(MSG_EXTENDED_LISTING) $@ $(OBJDUMP) -h -S -z $< > $@ # Create a symbol table from ELF output file. %.sym: %.elf @echo @echo $(MSG_SYMBOL_TABLE) $@ $(NM) -n $< > $@ # Create library from object files. .SECONDARY : $(TARGET).a .PRECIOUS : $(OBJ) %.a: $(OBJ) @echo @echo $(MSG_CREATING_LIBRARY) $@ $(AR) $@ $(OBJ) # Link: create ELF output file from object files. .SECONDARY : $(TARGET).elf .PRECIOUS : $(OBJ) %.elf: $(OBJ) @echo @echo $(MSG_LINKING) $@ $(CC) $(ALL_CFLAGS) $^ --output $@ $(LDFLAGS) # Compile: create object files from C source files. $(OBJDIR)/%.o : %.c @echo @echo $(MSG_COMPILING) $< $(CC) -c $(ALL_CFLAGS) $< -o $@ # Compile: create object files from C++ source files. $(OBJDIR)/%.o : %.cpp @echo @echo $(MSG_COMPILING_CPP) $< $(CC) -c $(ALL_CPPFLAGS) $< -o $@ # Compile: create assembler files from C source files. %.s : %.c $(CC) -S $(ALL_CFLAGS) $< -o $@ # Compile: create assembler files from C++ source files. %.s : %.cpp $(CC) -S $(ALL_CPPFLAGS) $< -o $@ # Assemble: create object files from assembler source files. $(OBJDIR)/%.o : %.S @echo @echo $(MSG_ASSEMBLING) $< $(CC) -c $(ALL_ASFLAGS) $< -o $@ # Create preprocessed source for use in sending a bug report. %.i : %.c $(CC) -E -mmcu=$(MCU) -I. $(CFLAGS) $< -o $@ # Target: clean project. clean: begin clean_list end clean_list : @echo @echo $(MSG_CLEANING) $(REMOVE) $(TARGET).eep $(REMOVE) $(TARGET).cof $(REMOVE) $(TARGET).elf $(REMOVE) $(TARGET).map $(REMOVE) $(TARGET).sym $(REMOVE) $(TARGET).lss $(REMOVE) $(SRC:%.c=$(OBJDIR)/%.o) $(REMOVE) $(SRC:%.c=$(OBJDIR)/%.lst) $(REMOVE) $(SRC:.c=.s) $(REMOVE) $(SRC:.c=.d) $(REMOVE) $(SRC:.c=.i) $(REMOVEDIR) .dep # Create object files directory $(shell mkdir $(OBJDIR) 2>/dev/null) # Include the dependency files. -include $(shell mkdir .dep 2>/dev/null) $(wildcard .dep/*) # Listing of phony targets. .PHONY : all begin finish end sizebefore sizeafter gccversion \ build elf hex eep lss sym coff extcoff \ clean clean_list program debug gdb-config
Matthias S. schrieb: > Du musst das *.c file der 'RobotArmBaselib' mit in den > Kompilierprozess > einbinden. und wie kann ich es Einbinden ? thnx
Carlo B. schrieb: > SRC += $(CAT_LIB_PATH)/RobotArmBase/RobotArmBaseLib.c Ahh, ok, ist schon drin. Dann schau doch mal, ob der Vorgang dir auch ein 'RobotArmBaseLib.o' im 'Default' Verzeichnis kompiliert. Die RobotArmBaseLib Dateien sollten sich anscheinend in einem Unterverzeichnis 'RobotArmBaseLib' befinden und das solltest du im include berücksichtigen. Also
1 | #include "RobotArmBaseLib/RobotArmBaseLib.h" |
:
Bearbeitet durch User
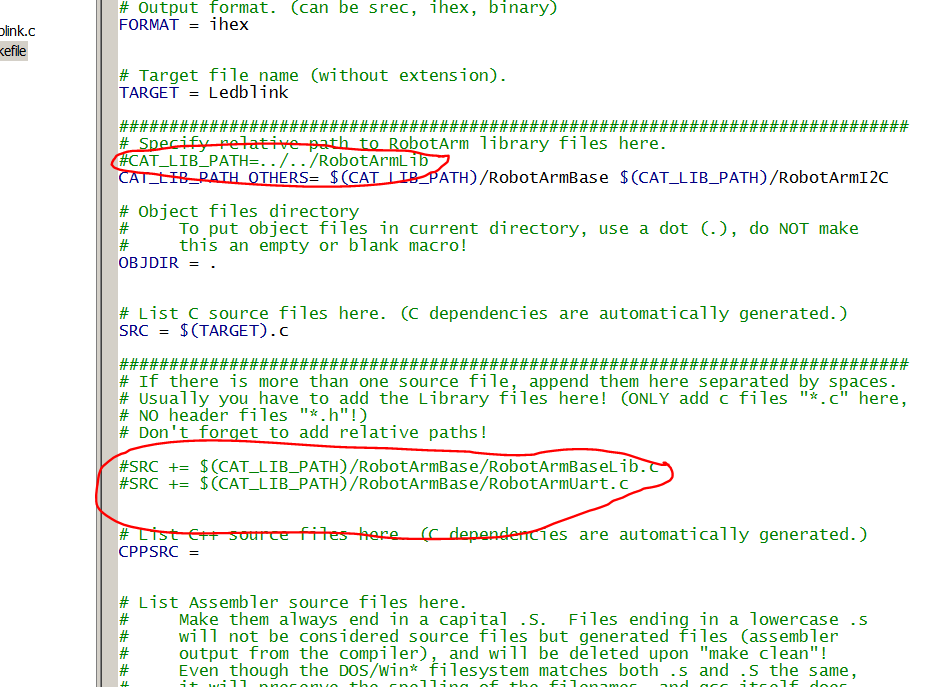
Überprüf mal auf deiner Festplatte. Ausgehend vom Verzeichnis mit dem makefile
1 | CAT_LIB_PATH=../../RobotArmLib |
2 Verzeichnisebenen höher. Dort muss es ein Verzeichnis namens 'RobotArmLib' geben
1 | SRC += $(CAT_LIB_PATH)/RobotArmBase/RobotArmBaseLib.c |
in diesem 'RobotArmLib' muss es ein weiteres Verzeichnis namens 'RobotArmBase' geben und in diesem Verzeichnis muss es eine Datei 'RobotArmBaseLib.c' geben. Wenn die Datei dort ist, wo sie hingehört, dann mach sie mal auf und schau rein. Dort drinnen müssten zumindest einige der Funktion geben, die dir der Linker als fehlend ankreidet.
Angehängte Dateien:
-

1.PNG
58 KB
Matthias S. schrieb: > Carlo B. schrieb: >> SRC += $(CAT_LIB_PATH)/RobotArmBase/RobotArmBaseLib.c > > Ahh, ok, ist schon drin. Dann schau doch mal, ob der Vorgang dir auch > ein 'RobotArmBaseLib.o' im 'Default' Verzeichnis kompiliert. > Die RobotArmBaseLib Dateien sollten sich anscheinend in einem > Unterverzeichnis 'RobotArmBaseLib' befinden und das solltest du im > include berücksichtigen. Also > #include "RobotArmBaseLib/RobotArmBaseLib.h" ich habes probiert, das hat leide net geklappt :/ alternative hab anderes versucht! ich habe einfach die Einbindung ausgeblindet! das Kompiler ging ne Stück weiter, spuckt es aber andere Fehlermeldungen: > "make.exe" all -------- begin -------- avr-gcc (WinAVR 20100110) 4.3.3 Copyright (C) 2008 Free Software Foundation, Inc. This is free software; see the source for copying conditions. There is NO warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. Compiling C: Ledblink.c avr-gcc -c -mmcu=atmega64 -I. -gdwarf-2 -DF_CPU=16000000UL -Os -funsigned-char -funsigned-bitfields -fpack-struct -fshort-enums -Wall -Wstrict-prototypes -Wa,-adhlns=./Ledblink.lst -I/RobotArmBase -I/RobotArmI2C -std=gnu99 -MMD -MP -MF .dep/Ledblink.o.d Ledblink.c -o Ledblink.o Ledblink.c:28:29: error: RobotArmBaseLib.h: No such file or directory Ledblink.c: In function 'highCurrent': Ledblink.c:34: warning: implicit declaration of function 'writeString_P' Ledblink.c:35: warning: implicit declaration of function 'writeIntegerLength' Ledblink.c:35: error: 'DEC' undeclared (first use in this function) Ledblink.c:35: error: (Each undeclared identifier is reported only once Ledblink.c:35: error: for each function it appears in.) Ledblink.c: In function 'Display_Current': Ledblink.c:42: error: 'Current_1' undeclared (first use in this function) Ledblink.c:42: warning: implicit declaration of function 'readADC' Ledblink.c:42: error: 'ADC_CURRENT_1' undeclared (first use in this function) Ledblink.c:44: error: 'DEC' undeclared (first use in this function) Ledblink.c:46: error: 'Current_2' undeclared (first use in this function) Ledblink.c:46: error: 'ADC_CURRENT_2' undeclared (first use in this function) Ledblink.c:50: error: 'Current_3' undeclared (first use in this function) Ledblink.c:50: error: 'ADC_CURRENT_3' undeclared (first use in this function) Ledblink.c:54: error: 'Current_4' undeclared (first use in this function) Ledblink.c:54: error: 'ADC_CURRENT_4' undeclared (first use in this function) Ledblink.c:58: error: 'Current_5' undeclared (first use in this function) Ledblink.c:58: error: 'ADC_CURRENT_5' undeclared (first use in this function) Ledblink.c:62: error: 'Current_6' undeclared (first use in this function) Ledblink.c:62: error: 'ADC_CURRENT_6' undeclared (first use in this function) Ledblink.c:66: warning: implicit declaration of function 'writeChar' Ledblink.c:68: error: 'max_current_servo1' undeclared (first use in this function) Ledblink.c:69: error: 'max_current_servo2' undeclared (first use in this function) Ledblink.c:70: error: 'max_current_servo3' undeclared (first use in this function) Ledblink.c:71: error: 'max_current_servo4' undeclared (first use in this function) Ledblink.c:72: error: 'max_current_servo5' undeclared (first use in this function) Ledblink.c:73: error: 'max_current_servo6' undeclared (first use in this function) Ledblink.c: In function 'main': Ledblink.c:82: warning: implicit declaration of function 'initRobotBase' Ledblink.c:86: warning: implicit declaration of function 'Servo_Power_And_Start' Ledblink.c:89: warning: implicit declaration of function 'setLEDs' Ledblink.c:90: warning: implicit declaration of function 'mSleep' Ledblink.c:92: error: 'true' undeclared (first use in this function) Ledblink.c:109: warning: implicit declaration of function 's_Move' make.exe: *** [Ledblink.o] Error 1 > Process Exit Code: 2 > Time Taken: 00:00
Carlo B. schrieb: >> #include "RobotArmBaseLib/RobotArmBaseLib.h" > > ich habes probiert, das hat leide net geklappt :/ Du arbeitest an der falschen Stelle. Ds Problem ist NICHT der #include. > Ledblink.c:28:29: error: RobotArmBaseLib.h: No such file or directory Eben. Das h-File kann jetzt nicht gefunden werden. > Ledblink.c: In function 'highCurrent': > Ledblink.c:34: warning: implicit declaration of function 'writeString_P' und so einiges andere ebenfalls nicht. Du musst dein Pfad Chaos in den Griff kriegen und nachsehen und auf deiner Festplatte Ordnung halten bzw. wissen, wo du was hinkopiert hast. Einfach alles auf dem Desktop rumliegen lassen ist keine Lösung (zumindest nicht dann, wenn man nicht weiss was man tut).
Karl H. schrieb: >>> #include "RobotArmBaseLib/RobotArmBaseLib.h" >> >> ich habes probiert, das hat leide net geklappt :/ Ja, war auch ein Fehler meinerseits. Anscheinend heisst erstens das Verzeichnis nur 'RobotArmBase' und zweitens scheint das *.h file wirklich im Projektverzeichnis zu liegen. Karl Heinz sollte es richtig beschrieben haben, wie gewöhnlich, hehehe.
:
Bearbeitet durch User
Karl H. schrieb: > und so einiges andere ebenfalls nicht. > > Du musst dein Pfad Chaos in den Griff kriegen und nachsehen und auf > deiner Festplatte Ordnung halten bzw. wissen, wo du was hinkopiert hast. > Einfach alles auf dem Desktop rumliegen lassen ist keine Lösung > (zumindest nicht dann, wenn man nicht weiß was man tut). ich weiß genau was ich tu :) du hast aber trotzdem vollkommen recht... Die RobotArmLib Datei war aufm Desktop :/ ich dachte dass ich die schon in C:\ hinkopiert hatte, es scheint aber dass ich aus-versehen die falsche Datei kopiert hatte... habe alle Dateien aufgeräumt und es hat geklappt ^^ Danke nochmal :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.