Hallo! Hat jemand eine getestete und für gut befundene Schaltung für eine H-Brücke mit MosFets auf Lager? Ich würde mich ja mit dem bts780 anfreunden, aber die verbaut Ratber alle in seinen BMWs ;-) darum sind die DInger auf dem amrkt nicht zu bekomen. Der Rest endet immer bei 3A oder ist mit bipolaren Transistoren aufgebaut. Ich habe irgendwo schon mal gelesen, dass es nur mit NMos und einer entsprechenden Ansteuerung gehen soll. Bevor ich jetzt lange rumexperimentiere würde ich lieber auf bewähretes zurückgreifen. fw
Tja, so wird das wohl nichts... Du musst Dir schon überlegen für welchen Spannungsbereich, maximaler Strom, maximale Frequenz Du eine H-Brücke brauchst. Wie klein muss sie sein, wieviel Leistung darf sie selbst verbrauchen usw.
Ich würde zwar glauben, das das nur eine Frage für die Dimensionierung der Fets ist, die ja im Fall einer diskreten Brücke variabel sein müßte, weil ja kein Strom für die Basis erforderlich ist sondern die Spannungssteuerung in Kraft tritt, aber daran solls ja nicht scheitern Ub = 40V (DC) Ia = 6A Imax = 40A (100ms) f = 0 - 50Hz Das Ding auf die Platine zu bringen soll mein Problem sein und der Eigenverbrauch wird, wenn zu hoch, einfach abgeschaltet, wenn Sie nicht gebraucht wird. fw
Bezugsquelle für bts780 würde mich auch interessieren. Bitte keine japanischen WEBseiten!
WWW.Rutronic.de?? Gibts blos datenblätter. Das hilft mr nix. Datenblatt hab ich schon
Hallo Flyingwolf, ich glaube, die Suche hat ein Ende. Dies ist ein Geheimtip!! Schau mal bei INFINEON. Ich benutze eine H- Brücke mit der Bezeichnung: TLE 5206 in meinen Segelwinden und Antriebsmodulen. Ein wirklich feines kleines Ding, 6A Spitze, 40Volt, 7Beinchen und total einfach zu betreiben.
Dann nehmt doch einfach die BTS7710GP von Infineon. Geht in der PWM wenn man nur LOWSide switched bis zu 50kHz ohne Probleme. Harry
im andren thread haben wir über die Si9986 gesprochen. Macht nicht so viel Strom, aber ist im SO8. Prinzipiell also das selbe. Habe mal das Datenblatt vom TLE5206 angenangen (200K). Das tolle am TLE ist, dass beide PIN's High, kein Kurzschluss entsteht, sondern der Motor gebremst wird. Und wo gibt es den TLE5206? BTS780 ist durch den BTS 781 ersetzt worden, jedenfall als Empfehlung angegeben. AxelR.
Ich bin auch sehr an so einem Teil interessiert - in einem anderen Forum hat man mir als Empfehlung dieses Bauteil genannt: TDA2002. Was haltet ihr davon? Die Frage, wo man den TLE5206 herbekommt ist wirklich gut! Ich habe mal ein wenig gegooglet und nichts in der Nähe gefunden - lüfte mal das Geheimnis!!!
...Das tolle am TLE ist, dass beide PIN's High, kein Kurzschluss entsteht, sondern der Motor gebremst wird.... Ich bin geschockt. Ich hatte das eigentlich als Grundvoruassetzung erwartet, weil ich sonst das Prinzip der H-Brücke nicht erkenne. Den Motor offen zu lassen ist doch nicht Sinn der Sache und Kurzschlüsse darf es schon garnicht geben? Immerhin ist das Ding am µC dran und soll dem Betreiber nicht um die Ohren fliegen, wenn der µC mal einen Reset ausser der Reihe einlegt. Ich habe heute Abend warscheinlich die Schaltung diskret ferig. Ausprobieren kann ich sie aber erst morgen, weil ich vergessen habe Fets zu kaufen. fw
Das ist bei normalen H-Brücken Schaltungen aber so! Wenn du den einen Transistor so schaltest, dass +VSS auf den Motor gegeben wird und einen anderen so, dass der Strom über die Motorwicklung gegen Masse fließt, dann dreht er sich. Wenn du aber VSS direkt gegen Masse schaltest, dann gibts halt einen Kurzschluss - das ist normal, oder?
Ne! Weil der untere zugeht, wenn der obere aufgeht und umgekehrt auf diese Weise kann es nie zu einem Kurzschluss kommen ausser im Umschatmoment durch die Umschatzeit in der der eine NOCH offen ist und der Andere SCHON offen ist. Das kann man mit einem R und einem L etwas abfangen, gehr aber trotzdem zu Lasten des Transistors. Darum diskrete Anschatung, die die Umschatung verzögert, so das der Eine erst auf geht, wenn der andere zu ist, Sonst könnte man ja auch einfach jeden Transistor an einen Port hängen. Aber das ist eben Schei... weil man so durch Fehler Reset unkontrollierbare Zustände auf die Brücke bekommt. 10 Motor dreht rechts 01 Motor dreht links 11 00 Motor steht Kein Kurzschluss. Wenn die fertigen Brücken das anders handhaben habe ich definitiv an der falschen Stelle gesucht und hätte vermutlich die Dinger ins Nirvana geschossen. Also unter diesen Bedingungen nehme ich doch lieber meine diskrete Ansteuerung. Tzzz Kurzschluss bei 11! Wer kauft sowas?!
Hi, Sowas kauft man nicht nur sondern baut es auch selber. Aktiven Freilauf nennt man das, wenn man bei PWM den unteren FET ausschaltet und den oberen dieser Seite ein. In dem Fall sind also während der off-Zeit der PWM beide obere Fets eingeschaltet. Also wie eine aktive Freilaufdiode, nur für beide Richtungen und ohne den Spannungsabfall einer Diode. Schaltest Du bei PWM nur den unteren Fet aus, sucht sich der Strom den Weg durch die Freilaufdiode des oberen offenen Fet, mit dem entsprechenden Spannungsabfall. Ansonsten sind diese kleinen Brücken für Servoanwendungen gedacht, da will man beim Stoppen immer bremsen. Ernsthafte Brücken sind wieder diskret, aber mit entsprechenden Brückentreibern aufgebaut. Wenigstens ein Treiber für einen unteren und einen oberen Fet gemeinsam. Der nimmt einem dann das Crossconducting Problem ab (delay beim Umschalten und Kurzer unmöglich) und man ist trotzdem flexibel bei der Ansteuerung. Logischerweise können die High Treiber auch gleich N-Fets treiben, das lebt allerdings von PWM oder einem Drehfeld. Der Boostcap muss eben immer wieder aufgeladen werden. Für eine 3-Fach Brücke habe ich da so gelöst: Ein Treiber für alle 6 Fets, drei low und drei high. Je ein Controllerausgang für jeden Fet. Damit mache ich dann per Soft das Drehfeld. Da ich für die PWM alle 6 Eingänge schalten müsste, musste ich mir was einfallen lassen. Ansonsten bräuchte man 6 PWM Ausgänge an einem Timer. Ein extra PWM-Ausgang steuert ein wenig Extralogik an. Die Logik macht folgendes: PWM ein: Alle 6 Signale 1:1 durchgereicht. Aus: Alle unteren Fets generell aus (low vom Controller "und" PWM) Wenn unterer Fet vom Controller ein, dann statt dessen der entsprechende obere ein (Freilauf). Also mache ich mit den 6 Ausgängen mein Drehfeld (das ist recht langsam) und die PWM rödelt mit nur einem Ausgang im Hintergrund, den Rest machen ein paar Gatter. Für solches Kleinzeugs wäre das natürlich viel zuviel Aufwand. Gruß, Norbert
@Norbert "Sowas kauft man nicht nur sondern baut es auch selber." Einer von uns Beiden hat Problem emit dem lesen. ALso ich weiß nicht warum man ein Brücke bauen sollte, die bei 11 Ansteuerung einen Kurzschluss verursacht und in Deiner Beschreibung wird auch kein Schluss gebaut sondern die Brücke über einen Pfad geschlossen, so dass der Motor nicht freiläuft, was für Positionieranwendungen praktisch ein Muss ist. Hab ich jetzt irgendwas nicht verstanden? fw
Hi, Richtig, Du hast irgendwas nicht verstanden ;-) Es geht um den Freilauf bei PWM, nicht um den frei auslaufenden Motor. Ich beziehe mich jetzt nur mal auf ne H-Brücke: In der Aus-Zeit der PWM sind dabei beide oberen Fets geschlossen, eben wie bei 11. PWM wäre also 10-11-10-11-10. Fets L1, H1 links, L2, H2 rechts. PWM ein: H1 ein, L2 ein. Strom von +, H1, Motor, L2, - PWM aus: H1 ein, L2 aus, H2 ein. Strom von +, H1, Motor, H2, + Lässt man H2 dabei aus, fliesst der Strom durch die Freilaufdiode in H2 nach +. Das sind 0,7V U-Abfall, die man nicht will. Also schaltet H2 ein, ein Fet leitet eingeschaltet in beide Richtungen gleich gut! Got it? Gruß, Norbert
Angehängte Dateien:
-

H-Brigde.gif
11 KB
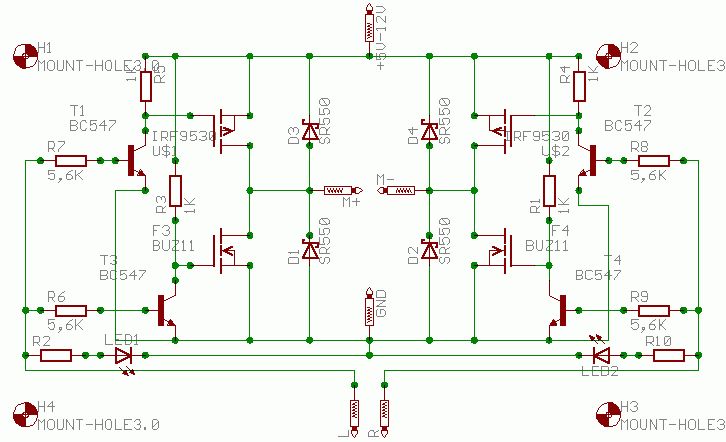
Hallo Leute, damit wir auch wissen, wovon jeder spricht, wäre es sinnvoll, wenn jeder mal seinen H-Brücken-Schaltplan postet. Im Anhang befindet sich meine H-Brücke, die schon seit einigen Monaten erfolgreich im Einsatz ist. Die Eingänge werden (wie sollte es anders sein) mit einem AVR gesteuert. Ich verstehe ehrlichgesagt noch nicht, wie ihr den Motor bremsen bzw. stoppen wollt!? - Ist das mit meiner Schaltung überhaupt möglich?
Hi, Du kannst nur Gas geben oder bremsen. Je Seite ist immer einer der beiden Fets an. Gruß, Norbert
Naja, aber was heißt bremsen: Bei mir würde es einen satten Kurzschluss geben, wenn ich 11 schalte! Wenn überhaupt müsste ich alles Fets einzeln schalten, dann ginge das vielleicht.
nö, was passiert denn bei 11? Überleg mal... btw.: unübersichtlicher konnte man das nicht zeichnen?
@Benjamin Deine H-Brücke scheint genau das zu sein, was ich nicht als H-Brücke verwenden würde. Du kannst halt jeden Fet einzeln ansteuern und somit also auch auf z.B. der linken Seite beide Fets in den leitenden Zustand versetzen. Das gibt dann in der Tat einen satten Kurzschluss. Finde ich aber denkbar unpraktisch, weil z.B. der 80537 beim reset alle Ports auf High legt und wenn man dann die Brücke direkt an den µC legt freut sich der Distribtor. Langsam komme ich auch dahinter was Norbert mir sagen will aber in dem, was ich mir unter einer ordentlichen H-Brücke vorstelle, geht es eben nicht, das "Lässt man H2 dabei aus,..."
Hi, Also eine H-Brücke ist genau dann ordentlich wenn sie das tut was man braucht. Bei der Ansteuerung die ich beschrieben habe, muß ich auch alle ausschalten können weil ich den Motor eben nicht bremsen darf. Bei einer gemeinsamen Anseuerung geht das eben nicht. Dazu brauche ich den Treiber sowieso, weil es da etwas mehr zur Sache geht. So habe ich z.B. die Gatewiderstände auf 33 Ohm, das hat gegenüber 100 Ohm gut was gebracht. Bei weniger wurden die Störungen zu heftig. Professionell würde keiner heute eine solche Endstufe ohne Treiber bauen. Einfacher und sicherer kann man des Crossconductings nicht Herr werden. Benjamin hat nur Glück, daß es nicht qualmt. Wenn das zeitlich nicht passt ist der eine noch nicht aus während der andere schon leitet. Höhere Frequenzen verbieten sich mit so einer Ansteuerung mit 1k Pullups sowieso. Komplett integrierte Brücken haben natürlich auch eine deadtime, da braucht man sich darum auch nicht kümmern.
OK! Ich will den Motor aber schon kurzschließen, nicht nur um die Induktionsspannung loszuwerden, sondern auch weil mir sonst die Genauigkeit meiner Positionierung flöten geht. Benjamins Brücke funktioniert bei 12V eigentlich ganz gut, obschon ich nicht verstehe wozu er 4 Transistoren zur Anstuereung genommen hat. Die Stromspitze hält sich bei 12V in erfreulichen Grenzen. Bei 20 sieht das allerdings ganz anders aus und ich spiele mit 40. Das macht der Fet dann nicht mehr mit. Darum brauche ich eine Anlaufstrombegrenzung und ein System um eine Totzeit zugenerieren, die unabhänging vom µC erzeugt wird, ohne das eine Einzelansteuerung der Transistoren statt findet.
Angehängte Dateien:
-

board.gif
8,6 KB
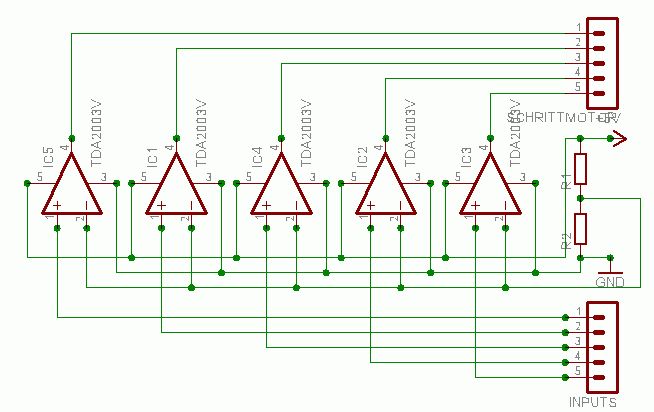
Noch mal eine andere Anregung: In einem anderen Forum wurde ich darauf aufmerksam gemacht, dass man den TDA2002 als Halbbrücke benutzen könnte. Im Anhang habe ich eine art H-Brücke für einen 5-Phasen-Schrittmotor gepostet. Wenn man den TDA2002 nur 2x statt 5x benutzt sollte das als H-Brücke funktionieren - was meinte ihr dazu?
Da tendiere ich eher zum L298. Der ist in etwa genauso alt, hat aber warscheinlich bessere technische Daten, kann mehr Strom liefern, verträgt eine höhere Spannung und hat eine geringere Sättigungsspannung. Nur er schwingt nicht von selbst auf 10MHz, wenn man das Platinenlayout etwas ungünstig auslegt...
Hallo, der L298 ist natürlich eine gute Idee für Uni- und Bipolare Schrittmotoren, aber für 5-Phasige würde ich doch den TDA2002 vorziehen, da er weniger Platz auf der Platine wegnimmt und ich weniger unnütze Teile aufbaue. Die Technischen Daten sind vom TDA2002 sogar noch besser: Strom: 3,5A Spannungsausgang: 8V Schau ihn dir einfach mal an.
Ich kenne das IC, liefert 8W an 12V, ausreichend für normale Emdstufen. Allerdings schwingt das Ding gerne. Ich hatte es mal auf 1W @ 10MHz geschafft... Man kann es durchaus machen, aber ich würde dann doch lieber zu einer MOSFET Endstufe greifen. Warum ? Na weil ich alles viel kompakter bauen kann: Am TDA2002 fallen bei 2A rund 2V an jeder Seite ab, macht also 2V*2A=4W pro IC. Bei 5 Kanälen also 20W ! Nehme ich dagegen billige MOSFETs im SO8 Gehäuse oder was anderes kleines als SMD, komme ich mit 0,1OhmRDSOn*2A*0,2V auf 0,4W Verlust, macht also 0,4W*5=2W insgesamt. Und da kann ich mir ganz gut den Kühlkörper sparen, den ich für die TDA2002 Endstufe brauchen würde. Sowas gab es aber wirklich mal: Aus einer 20MB Festplatte hatte ich mal eine 2x 12V Audio Endstufe ausgebaut, die als Motortreiber diente.
Dann poste doch mal eine Schaltung oder würdest du so eine H-Brücke, wie ich sie oben verwendet habe benutzen? Welche Mos-Fets würdest du nehmen?
Kommt ganz auf die Bedingungen an. Meistens verwende ich sowas wie den L293, L298, L6202 oder ähnliches. Wenn es mal etwas stärker sein muss, dann auch mal irgendwelche IR21xx MOSFET Treiber und z.b. IRF740 für 400V 10A. Damit steuere ich zum Beispiel einen 250W 300VDC Motor. Ich verwende meistens das was gerade so rumliegt, wenn es passt. Ich habe eine Menge schöner ICs aus alten Druckern und Festplatten, da ist fast immer was brauchbares dabei.
@Benedikt Du wirst Doch aber zugeben dass die Ausschlachtung von Druckern und Festplatten nicht das geeignete Werkzeug für die Produktion von 7500 H-Brücken ist. Bei den OPv-Lösungen muss ich einfach passen. Ich weiss nicht warum, aber ich hasse die Dinger! fw
@flyingwolf Das habe ich auch nie behauptet. Die TDA2002 Lösung ist ebenfalls wohl kaum für sowas geeignet, ebenso die diskrete Lösung. Ich würde mal bei ST schauen, die haben ganz nette Sachen.
@flyingwolf: Kannst du mal den Schaltplan von deiner Idee, bzw. deiner diskreten Lösung posten?
Angehängte Dateien:
-

bruecke.jpg
13 KB

Klar, aber im Moment bin ich noch nicht zu frieden. Bei 30V und einer Taktung über 100 Hz fliegen mir immer die Transistoren auseinander. Offenbar sind die Spannungsspitzen im Totmoment zu hoch ich kann sie bloß auf dem Scope nicht sehen! Langsam gehen mir die Fets aus. Solche Probleme hatte ich nicht, als ich die Stufe mit einem fetten Vorwiderstand betrieben habe. Die Totzeit hat ganz offensichtlich schwere Nachteile. Ich hab leider kein so schönes Schaltplan-Malprogramm, darum hab ich nur eine Hälfte der Brücke gemalt, die Andere sieht dann natürlich genauso aus. Hat jemand eine bessere Idee?
wollte eigentlich gerade ins Bett... Zum Malen also schon zu spät. Die Gatter, die mit"D" gezeichnet sind, sind D-Flipflops? Hast Du die Gatespannung begrenzt? Oder ist die Schaltung nur vereinfacht gezeichnet? Ich male morgen(nachher) mal was auf, was auch funktioniert. Die ganze Sache mit den Logikgattern ist zwar vom ablauf her nachvollziehbar, aber total unnötig.(nur meine persönliche Meinung) Bis morgen AxelR.
nun,es war eine idee um die Fets am Kurzschluss zu hindern, was aber nicht ihre Lebensdauer verlängert hat. Schade aber auch.
Sind wir nun eigentlich schon zu einer Lösung gekommen? Ich suche ja immer noch dringend nach einer H-Brücke (5-fach) genauer gesagt 5 Halbbrücken für meinen 5-Phasen-Schrittmotor. Was könnt ihr mir wirklich empfehlen? Übrigens habe ich gestern meine H-Brücke (s.o.) unter Laster (2A) längere Zeit laufen gelassen - funktionierte tadellos - wurde nur leicht warm, aber das sollte normal sein.
12V und 2 A sind nich unbedingt eine besondere Herausforderung. Wir reden hier von 40V und 10A. Das ist eine andere Liega. Lass mal schauen was Axel da auf Lager hat. Ich warte ja auch schon den ganzen Tag drauf. Wenn Du noch nicht so genau weißt, worüber wir hier verhandeln, häng Deine Brücke mal ohne Last an 24-30V! Falls Du sie bis morgen brauchst, solltest Du aber noch in paar Fets rumliegen haben.
Ach so war das gemeint, ich dachte, dass die Funktion von meiner H-Brücke generell angezweifelt wurde. 40V und 10A - alter Finne das sind 400W - Wie groß muss der Kühlkörper sein bzw. was für Fets gibt es da überhaupt? Weil wir gerade beim Klarstellen sind: Ich habe nichts gegen integrierte Lösungen - im Gegenteil - ich könnte gut eine art Halbbrücken-IC bis 2A dauerlast gebrauchen. Da blöde beim L298 ist ja, dass dort gleich 4 Halbbrücken drin sind - ich brauche aber 5 - da würden bei 2x L298 3 Halbbrücken brach liegen.
@Benjamin Das ist ja der Hammer. Bei Bipolaren transistoren hast Du 2x0,7V = 1,4V * 10 A = 14W Verlustleistung. Beim Fet hast Du einen Rdson 0,1 Ohm und weniger, macht I*I*R = 2W Verlustleistung, wenn da nicht der Kurzschluß beim umschalten wäre...
@HanneS Netter Tip. Ich werde morgen mal versuchen eine Hand voll davon zu beschaffen und zu verbrennen. fw
@Fliegender wilder Hund: Wäre schade drum. Benjamin hat nach Halbbrücken bis 2A gefragt. Gut, sind keine echten Halbbrücken-IC's sondern nur DoppelMOSFETs, tun ihre Arbeit mit ein paar Widerständen im Bereich bis 2A ganz gut. Können auch höhere Impulsströme ab. Für dein Hochleistungs-Projekt gehen die natürlich nicht. ...
Ich bin da ja nun auch nicht so der Experte - wie würdest du dieses IC an einen Mikrocontroller anschließen (Widerstandsmäßig) - kannst du mal einen Schaltplan posten bzw. erklären?
Kommt drauf an, was die Brücke tun soll... Soll sie "bremsen" (Positionierantrieb), dann wäre hier ein Beispiel: http://www.brummbaerhannes.de/hannes/avr/servo/servotab.html Wird der IRF mit höherer Spannung betrieben, werden Transistoren und ggf. Spannungsteiler an den Gates erforderlich. Für die andere Grundschaltung habe ich jetzt kein Beispiel griffbereit. Diese lässt den Motor frei laufen. Es dürfen aber nicht beide Zweige gleichzeitig angesteuert werden. Da meine PWM-Frequenzen im sinnvollen Rahmen bleiben, habe ich keine Probleme mit den Umladeströmen und den Querströmen beim Umschalten. ...
@HanneS Hast Du auch noch was elegantes für mich auf Lager? Die einfache Brücke hab ich mit nem fetten 4Ohm Widerstand ganz gut unter Kontrolle, auch sterben mir die FETS nicht weg. Ist aber nicht sehr elegant. Bei der D-FlipFlop Variante halten sich die Ströme in Grenzen, aber die FETs verrecken in Windeseile. Ich denke es liegt an der Induktionsspannung.
@Fliegender...: Nööö, in deiner Leistungsklasse leider nicht. Da sind die EMV-Probleme komplexer als die eigentliche Grundbeschaltung. Das überlasse ich den Fachingenieuren. Und die greifen dann meist auf spezielle Brückentreiber-IC's zurück. ...
@Axel Wir hoffen immernoch darauf, dass Du uns das Ei des Columbus lieferst ;-)
Ich hatte am WE keinen Zugang zum PC -> Familie hat Ihr Recht eingefordert... So mit Spazierengehen usw. Sorry Dir werden die oberen Fet's sterben, weil die Gatespannung zu hoch ist. Prinzipiell kannst du den Shotthrought, also den Querstromgeschichte beseitgen indem Du den Gatewiderstand mit einer Diode überbrückst. Dann Dauerts etwas, bis der Mosfet einschaltet, ausschalten hingegen geht sehr schnell. Die Gatespannung des oberen Fet (wenns ein N-Kanal ist) muss über der Betriebssapnnug liegen, damit der Ausgang sicher schaltet. Mal sehn, ob in der Mittagspause bissel Zeit ist. Axel
Ja, ja die liebe Familie ... http://www.bei-gertrud.de/dw/dw_hetero.html Jetzt wo Du es sagst... Ich hatte ein bisschen mit RC-Kombinationen rumgebastelt, aber der FET kommt ja mit einer Sperrschichtkapazität daher. Die Gatespannung zu hoch? Ich habe oben P-FETs damit sie sich gegenseitig verriegeln. Sie sterben auch nicht bei 1 oder 2 Hz. Sie sterben bei 50 und 100Hz. Kann da an der Gate-Spannung liegen? Gibts da was einfaches, fertiges um die Spannung zu begrenzen oder muss ich wieder selber denken und haufenweise z-Dioden entjungfern?
NUn, ummen paar Z-Dioden wirst Du nicht umhinkommen. Besser wird vielleicht doch schon ein integrierter Treiber IC von Reichelt IR2102(?) habe ich jetzt nicht genau im Kopf. Du kannst aber auch HIP4080 / HIP4081 zum Ansteuern der Fet's verwenden. http://groups.yahoo.com/group/osmc/ Ich habe nebnher nach ner FünferBrücke ausschau gehalten (darum ging es wohl primär) aber nichts integriertes gefunden. Axel
Nein, die 5er Brücke war mehr das sekundäre Thema dieses Threads. HIP4080 sieht doch mal nicht schlecht aus. Mal schauen ob sie beschaffbar ist. Trotzdem würde mich interessieren wie sowas diskret aussehen kann.
Segor hat den HIP4080 am Lager, da hab ich meinen her. Läuft an 80Volt (Class D Verstärker)
Ich weiß. Die leben richtig gut von mir. Trotzdem suche ich weiter nach der diskreten Variante
Angehängte Dateien:
-

haah-bruecke.JPG
86 KB

so läuft das bei mir. allerdingens steure ich jedes portpin einzeln...
Hm! Über welche Größenordnungen von motoren reden wir hier? Hast Du noch ein paar Cs oder Ls spendiert, um die Spannungsspitzen abzufangen?
Parallel zum Motor eine Reihenschaltung von 100nF63VKerKo/10Ohm. Parallel zur Betriebsspannung 4x100nF/63VKerKo und die eingezeichnete Suppressordiode(15KPA40A).Die macht den Job. Wichtig noch: wenn Du hauptsächlich PWM fährst, etweder die High-LowSide abwechseld schalten oder aber (dicke)SchottkyFreilaufdioden zusätzlich über die Fet's löten. Die Verlustleistung in den Bodydoden wird sonst zu groß.
Ich dachte mir sowas. Ich hab die verdammten Dinger am Wochenende das erst Mal weggelassen, weil grad nicht zur Hand und hab so an die 15 FETs zerrissen. Das werden wir doch gleich nochmal ausprobieren.
Angehängte Dateien:
-

H-Bridge.jpg
250 KB

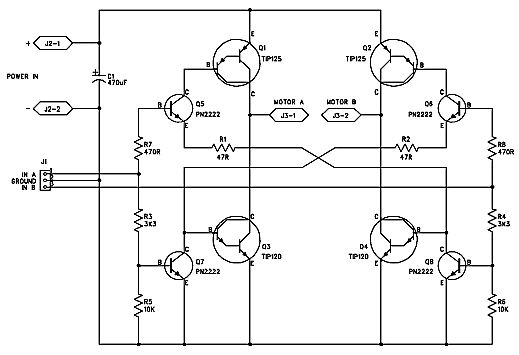
Du lebst auch nach dem Motto: "Try and Error, wa?" lol Für einen Schüler (fast Stundent) wie mich wäre das etwas kostspielig - das ist Elektronik ja so schon. Ich habe mich nun doch durchgerungen eine Diskrete Lösung für meine Schrittmotorsteuerung zu nehmen (s. Anhang). Wenn ihr noch Fehler entdeckt, meldet sie mir bitte. Das Vorbild dieser Schaltung stammt übrigens von http://www.bobblick.com/techref/projects/hbridge/hbridge.html - habe ich ja oben schon einmal gepostet.
Das wird wohl so nicht funktionieren... Oder wie machst du die Darlingtons auf? ...
Angehängte Dateien:
-

halbbruecke_bipolar.JPG
18 KB

Wenns nun doch bipolar sein soll, bittesehr. Du musst doch minmum2Phasen von den fünfen stromlos halten? Wie willst Du das machen? Du kannst mit deiner Schaltung nur High oder Low Schalten. Stromlos geht garnicht( Die Schaltung funktioniert so eh' noch nicht ganz). Ich habe Dir mal eine Schaltung für eine Halbbrücke angehangen, bei der Du beide hälften steuern kannst. Bräuchtset dann allerdings 10 Portpins. :-( Die, für die Bipolartransistoren notwendigen, Basisbeschleunigungelemente zum Ausräumen der Basis habe ich erstmal weggelassen... Kann es sein, das ICH die Threads durcheinander bringe?? Axel
Die Textlabels "Highside" und "Lowside" sind zu tauschen, jaaa sorry. passiert.
@Axel "Kann es sein, das ICH die Threads durcheinander bringe??" Geringfügig, ist aber schon OK, weil der Thread inzwischen ungeahnte Ausmaße angenommen hat. Mal sehen ob am Ende sogar was sinnvolles dabei rauskommt. @Benjamin "Du lebst auch nach dem Motto: "Try and Error, wa?" *lol*" Bitte! Wir sind Akademiker! Da heißt es successive Approximation! ;-) Auch, aber hauptsächlich gehe ich das Problem so an, dass ich mich frage warum es nicht funktioniert und dann einen Weg suche das Problem zu umgehen. Wenn ich mit einem Kondensator und einem Widerstand erreiche, wofür mein Mitbewerber einen OPV benutzt, bin ich im Vorteil. Und Meier-Tiere sollte man generell vermeiden fw.
Angehängte Dateien:
-

hb.gif
11 KB
Wow! Das geht in diesem Thread ja rasend! Das finde ich super! @HanneS: "Oder wie machst du die Darlingtons auf?" - wie meinst du das? Was muss ich verändern, damit es funktioniert? Ich möchte ja möglichst wenig Bauteile verwenden, damit die Platinenausmaße nicht so riesig werden. Im Anhang ist noch einmal die Vorlage, die ja auf jeden Fall funktioniert - habe ich da etwas übersehen? @AxelR: Laut dieser Seite sollte das aber gehen: http://www.bendrich.com/SM-Ansteuer.htm#bipolar Ich habe die einzelnen Schritte auf einem Zettel mal durchprobiert - das sollte schon gehen.
wie du siehst, sind die Bases der transistoren einzeln gezeichnet. Nicht ohne Grund. Deine Schaltung (*.gif) funktioniert bei braven Motoren im 100mA Bereich. Hier wird vorrausgesetzt, dass, wenn der Motor durchgesteuert ist, an einer Seite Low-Pegel und an der anderen Seite vom Motor high Pegel anliegt. Durch die Spannung, die der Motor selbst erzeugt(BackEMF) ist dem lange nicht so! Ebenso spielen die 4Anderen Spulen hier mit rein. Der Motor wirkt ja auch wie ein Transformator. Da die diagonalen Transistoren in deiner Brücke vom Mototrstrom abhängig sind(Spannungsabfall der Transistoren im nicht gesättigten Bereich) wird die Schaltung bei Belastung verrückt spielen, Sowas kann man bei kleinen Modellbauservos sicher nich machen. nicht bei dem, was Du vorhast. Die Transistoren müssen rückwirkungsfrei einzeln sicher geschaltet werden können. Das ist gerade bei BipolarTransistoren nicht einfach, da die Stromverstärkung ebenso stark vom Kollektorstrom abhängt. Du musst im Treiberkreis schon einiges an Strom fliessen lassen und die Basis mit einem kleinen Kondensator überbrücken, der die Stromspitzen für die Basis bereitstellt. Ich sage mal, die Schaltung, die Du Dir als Vorlage ausgesucht hast, ist nicht so doll geeignet, leider. Gruß axel
@Ben... Meine Frage, wie du die Darlingtons auf machst, bezog sich nicht auf "hb.gif" sondern auf "H-Bridge.jpg" einen Beitrag vor meinem Kommentar. Und dort ziehst du mit den Treibertransistoren die Basen der Darlingtons zu den Emittern, was die Darlingtons in den Sperrzustand versetzt. Ich kann aber keine Bauteile erkennen, die den Darlingtons einen Basisstrom geben. Also werden diese niemals in den leitenden Zustand kommen. "hb.gif" habe ich mir kopiert, werde ich für FET (IRF7389) umstricken, denn die Idee ist gut. Es handelt sich um eine ganz normale Brücke (für freilaufenden Motor bei 00 am Eingang), die mit einer zusätzlichen gegenseitigen Verriegelung "nachgerüstet" ist. Diese Verriegelung sorgt dafür, dass die Ansteuerung des Lowside-Transistors "kurzgeschlossen" (oder "abgeleitet") wird, wenn der zugehörige Highside-Transistor aktiv ist. Bei Verwendung bipolarer Transistoren (für den Lastkreis) ist das "nur eine Verriegelung", die den Brückenkurzschluss bei 11-Ansteuerung verhindert. Ich werde dieses Prinzip mit FET nutzen, da bekomme ich eine "zuschaltbare" Bremse: 00 - Alle Transistoren aus, ungebremster, freilaufender Motor, 10 - Eine Richtung, 10 - Andere Richtung, 11 - beide Highside aktiv, beide Lowside gesperrt, also Bremse (wirkt nur bei FET als Brücke) Die Ideale Brücke für kleinere Fahrantriebe um die 1A... ...
@Hannes: Also müsste ich an die Basen noch 1k gegen +Vss setzen, damit das funktioniert? Aber: In Hb.jpg ist das auch nicht so gemacht! ...jetzt bin ich leicht verwirrt... Die Lösung mit 00 finde ich auch gut - ist aber bei meinem Vorhaben unlogisch - nur für Vollbrücken (H-Brücken). Meinst du, dass die Schaltung für meine Zwecke ausreichen würde - ich habe endlich ein Datenblatt meines Schrittmotors gefunden, in dem steht, dass der Motor mit 24V bei 1,4A betrieben wird!
@Ben: Überleg mal... Was passiert, wenn du die Lowside-Transistoren mit Widerständen nach Plus schaltest? - Sie steuern bei unbeschalteten Eingängen durch... Willst du das?? - Ich glaube nicht... Du willst einen 5-Strang-Schrittmotor betreiben. Ich kenne die nicht, ist mir noch nicht untergekommen. Ich hatte bisher nur 4-Strang, meist unipolar, aber auch schon bipolar. Was musst du den 5 Strängen des Steppers anbieten, damit er steuerbar ist? - Braucht er nur 5 "Strippen"? (interner Sternpunkt) - Oder sind es 10?? (Jeder Strang 2 Enden?) - Wenn ja, was machst du mit den zweiten Enden? - Zu Sternpunkt zusammenfassen? Wie gesagt, ich kenne deinen Motor nicht und kann daher auch nicht wissen, wie du ihn ansteuern musst. Ich könnte nun nach 5-Strang-Stepper googeln und mich sachkundig machen, aber wozu? Ich habe doch keinen solchen Motor... Dein Schaltungsentwurf sieht aber so aus, als hättest du 10 Leitungen vom Motor, von denen du 5 steuerst und 5 (die "Spulenenden") irgendwo "versickern". Ich kann nicht erkennen, wo TP3...TP7 angeschlossen sind... Übrigens erkenne ich erst jetzt, dass der MC die Highside-Transistoren doch ansteuert. Ich hatte übersehen, dass die oberen Treiber NPN sind und deren Emitter GND führen. Es ist auch unüblich GND als obere "Schiene" zu führen. Außerdem fehlt die Verbindung zum Motor-GND, ohne die nix funktionieren würde. Also, wenn der Motor 10 Strippen hat, was machst du dann mit den anderen 5??? - Denn steuern willst du ja nur 5... Fasst du sie zu einem Sternpunkt zusammen? Legst du diesen an Vcc? - Dann brauchst du nämlich keine Brücke, sondern nur Transistoren an der Lowside. Willst du die Spulen aber bipolar bestromen, dann brauchst du 5 Vollbrücken, von denen jede 3 Zustände hat: offen, H, L. ...
Angehängte Dateien:
-

200-volt-h-bruecke.gif
7,1 KB
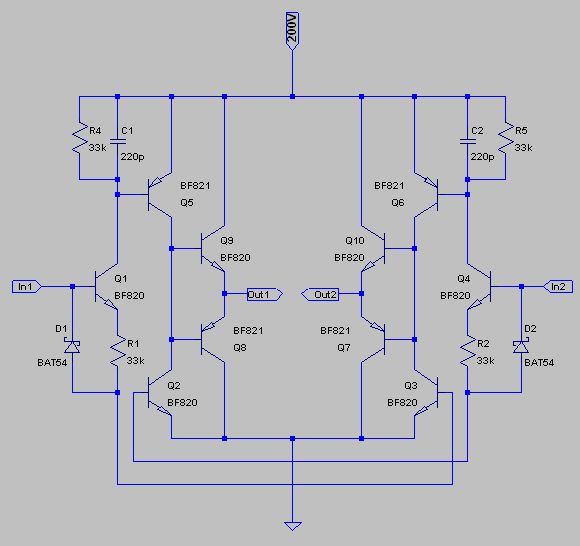
Hmm... H-Brücken-Sammlung??? Da kann ich auch etwas dazu beitragen. Allerdings eine etwas exotische H-Brücke. Und zwar für ein paar Milliampere bei 200 Volt. Angesteuert wird das Teil mit 5 Volt Pegel. Das Prinzip kann man natürlich für andere Spannungsbereiche adaptieren. Z.B. für 24 Volt Motoren oder so. Je nach dem eben... Wichtig ist nur, dass die zu schaltende Spannung mindestens 6 Volt oder höher ist, und dass die Brücke mit 5 Volt Pegel angesteuert wird. Wenn sie mit 3.3 Volt Pegel angesteuert werden soll, müssen R1 und R2 entsprechend verkleinert werden. Das ist ja aber logisch, oder? ;-) Viel Spaß damit! ;-)
Angehängte Dateien:
-

5eck.gif
7,2 KB
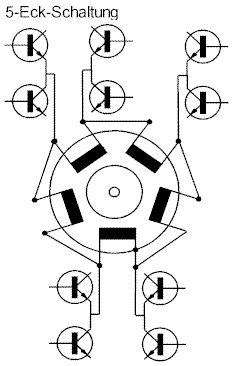
Guten Morgen, @...HanneS... Sieh mal aufs Bild, was ich angehangen habe. Ist aus dem Link, der oben schon mal gepostet wurde. nennt sich 5Eck-Schaltung. Habe ich vorher noch nie gesehen... @Ben. Verkauf' deinen Stepper wieder. So ein stress...
Moinmoin Axel... Jou, als Ring geschaltet, wie im guten alten Gleichstrom- (Trommelanker-) Kollektormotor. Mag auch (in Anlehnung an das "Vorbild") sehr gut anzusteuern sein, man lässt (um "fast" 180° versetzt) Plus und Minus "umlaufen" (entspricht den Kollektorbürsten des Originals, relativ gesehen), also 10 Takte pro Umdrehung, in denen man wechselweise Plus und Minus "weiterschaltet" oder 20 bei Halbschritt. Das dürfte eine sehr gute Möglichkeit für einen bürstenlosen (kontaktlosen) Antriebsmotor sein, der recht rundlaufend "antreiben" soll. Zum Beispiel für Antriebsrollen von Scatern? ;-) Zum Positionieren (die klassische Stepper-Aufgabe) würde ich diese Schaltung nicht favorisieren. Ich halte es auch für möglich, dass solche Motoren keinen magnetischen Rotor (Synchronmotor) haben, sondern einen Kurzschlusskäfig (Asynchronmotor wie Kurzschlussläufer). Ist jedenfalls interessant und vor Allem auch nachvollziehbar, zumindest wenn man mal in den guten alten Elektromaschinenbau reingerochen hat. Ich hatte das Glück 1965/66, das war ein "spezial-UTP für angehende Elektri(n)ker", ein Jahr lang einmal die Woche eine volle Schicht in der Ankerwickelei (Industriemotoren, Drehstrom und sehr viel Gleichstrom). War die zentrale E-Werkstatt des Mansfeld-Kombinates. Solche Spezialisierungs-Experimente gab es auch für andere Berufsgruppen wie Autoschlosser, Küche & Lebensmittel bzw. Friseure. (es war nicht alles schlecht!) Gruß... ...HanneS...
Diese bipolaren Brücken wundern mich etwas. Ist da nicht die Verlustleistung enorm hoch? Die Idee mit den Sperrschichtkapazitäten war übrigens gut. Die Transistoren werden zwar bannig warm, wegen der Verlustleistung bei der Umschaltung, aber es scheint besser zu funktionieren, als die TTL-Totzeit, die ich mir überlegt habe.
probier mal Freilaufdioden parallel zu den Fet's zu löten. Die interne Diode im Fet hat eine Flußspannung von bis zu einem Volt bei entsprechendem Strom. Dieser Strom fliesst genau dann, wenn Du den Motor im PWM modus Ausschaltest. Während die Verluste sich im eingeschalteten Zusatnd mit R_on x I_max^2 beschreiben lassen, sind die Verluste im/nach dem Ausschalten mit I_max x U_fdiode wesentlich höher! Daher schnelle ParallelDioden zum Fet und der wird dann auch nicht mehr warm. Axel
TTL Ansteurung: Freilaufdiode am FET / TAZdiode über dem Motor noch ein C um die Spitzen wegzufischen und ein kleines L in Reihe um die schnellen Spitzen zu erwischen und 2 tote FETs nach nur ein paar Sekunden 200Hz Impulsbetrieb. Ich weiß nicht was es ist und ich kann es nicht messen, aber was immer es ist, es muss mit der Totzeit zu tun haben. Verschiebung durch Sperrschichtkapazität: Die Wärme kommt von der Verlustleistung wenn der FET leitend wird. Durch den "langsamen" Anstieg (ausgenutzte Sperrschichtkapazität) und die hohen Motorströme fallen ja bis zu 150W Verlustleistung an meinem Fet an. Das er da bei 200Hz schon wärmlich wird ist schon ok, oder? Nur wenn die Z-Dioden die Gate-Spannung begrenzen will da Konstrukt nicht so wie es soll, da muss ich mir noch mal die Zustände anschauen. Bei einer Untersetzuung von 1:90000 wird ist aber eh fraglich ob ich die PWM überhaupt noch brauchen werde.
Also die Diode und der R im Gate haben es voll gebracht. R muss man sich ausrechnen, damit die Totzeit nicht zu lang wird. Z-Dioden zur Begrenzung der Gatespannug bringen es überhaupt nicht. Die ganze Brücke fängt an zu schwingen und wird bei verschiedenen Frequenzen instabiel. Bei großen Strömen empfihlt sich ein kleines R im Hauptstrompfad um die Rückwirkungen der Anlaufströme zu begrenzen. Ein c 100 - 200 nF am Motor und zum Schutz noch mal direkt hinter den Transistoren fängt Pikes. Optional kann noch eine unipolare Transildiode herhalten, hat aber bei mir nichts mehr gebracht. Die Schaltiung hasst leerlaufende Motoren. Für lastloste Tests ist es ratsam ein R paralel zur Last zu schalten. (Kühlen nicht vergessen!) Die Taktfrequenz ist der kritische Punkt, weil je nach RGate und Strombelastung viele Watt anfallen, die der Kristall kurzzeitig schluckt, aber bei schneller Wiederholung wollen die irgendwann weggekühlt werden. 1000 Dank für die Unterstützung.
Jetzt musst du die fertige Schaltung aber auch posten! Wir wollen ja alle davon profítieren. ;-)
mach ich! Ich denke aber das Euch meine gescannte Papierskizze zu altbacken ist. Ich mach grad das Layout fertig, dann gibts die fertige, galvanisch entkoppelte Motortreiberstufe für direkten Anschluss an µC direkt auf diesem Kanal
noch nen Tip zum Abschluss. Ich habe gerade mal in die Serviceunterlagen meiner AutoEndstufe gesehen (jaa, ich habe für mein CarAmp eine Servicemanual!). Dort ist zwar keine H-Bruecke für ein Motor drinn, aber im Transverter ist ein "dicke" Halbbrücke drinn(2x12Fet's) für jede Spannung;Je ein Ringkern mit Mittelanzapfung. Dort sind den Fet's je eine Reihenschaltung von 2,2n63V/100Ohm0.5Watt parallel geschaltet, um die delta_u/delta_t zu begrenzen(?). Nebenbei (hier uninteressant) parallel zu den GleichrichterFet's auf der sekundärseite wurde das auch gemacht. Ein C als Entstörung alleine braucht wahrscheinlich auch wieder zu viel Strom, wenn die Last zu gering ist, daher vielleicht der Widerstand. Such mal nach "Snubbernetwork" im google. Den Trick mit der Diode ist in der Schaltung mit einem PNP zur Vollendung gebracht worden! Sieht auf den ersten Blick falsch aus, macht nach näherem hinsehen aber doch Sinn. Wenn ich drann denke. scann ich das mal ein. Auch eine handgemalte Skizze können wir lesen! Nix mit "altbacken". Allemale besser, als mit Word nichtssagende Striche... Gruß Axel
Ich meine mich zu erinnern, dass das mit dem C-R parallel zum Hauptstrompfad des FET in der Audiotechnik gemacht wird, weil die Sperrschichtkapazität die hohen Frequenzen abschneidet bzw verzerrt. Also wird mit einer kapazitiven Kopplung nachgeholfen. Aber wie gesagt, das ist nur eine blasse Erinnerung aus grauer Vorzeit. Keine Ahnung ob das stimmt.
Wie siehts aus, hast du mal einen Schaltplan erstellt? Hat sich deine Schaltung schon bewährt? Ich habe mir nun eine Schaltung mit dem L298 gebaut - mal sehen, wie die funktioniert - sollte aber gut laufen, da das Ding bis 50V und 4,5A pro Ausgang betreiben kann.
Ich hab heute das Layout fertig gemacht, werde sie morgen bestücken und dann mal schauen, was das System so hergibt. Warscheinlich am Wochenende. Dann gibts hoffentlich die passenden Oszi-Bilder obendrauf. Immerhin hat der Thread wohl viele Interessenten gefunden, wenn man sich mal die Downloads der einzelnen Dateien so anschaut. fw
Angehängte Dateien:
-

h-bruecke.jpg
34 KB

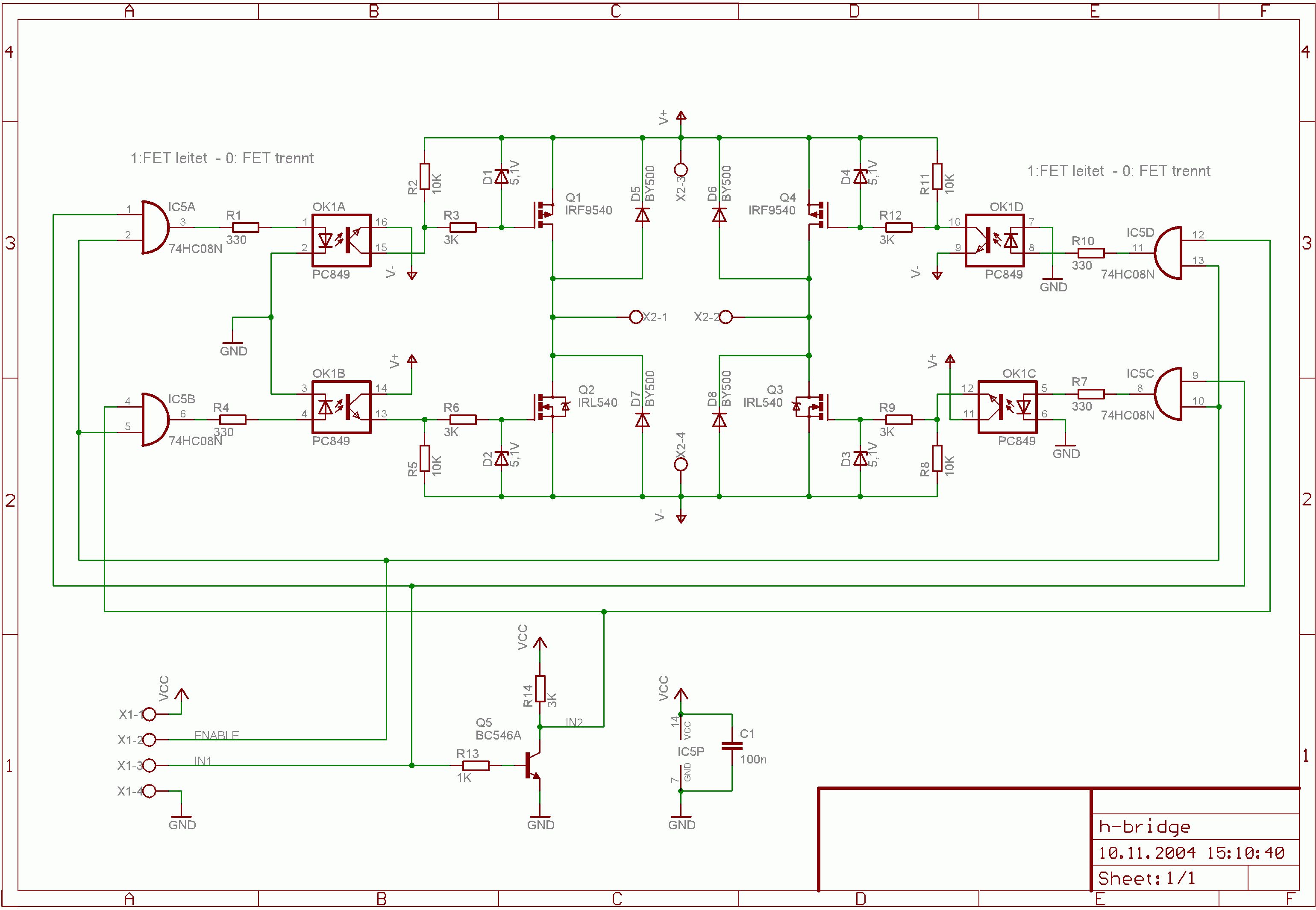
Hier ist nun die viel versprochene H-Brücke Getestet mit Dauerstom 10A 35V und PWM bis 1000Hz Nach einer halben Stunde ist dann leider der Motor verreckt und ich habe den Verdacht, dass meine Stromversorgung gelitten hat. Z-Dioden zur Begrenzung der Gate Spannung haben sich nicht bewährt. Die OKs können durch Transistoren ersetzt werden, aber dann habe ich Rückkopplungen in den µC bekommen. Die Motorspitzen können optional mit einer unipoleren Schutzdiode abgefangen werden, ich habe aber keinen Unterschied mit und ohne festgestellt. Bei 10000 Hz käpft der Motor mit den Anlaufströmen und erwärmt sich "leicht". Auch die Brücke fängt dann an zu dampfen. Die Leiterwege des Hauptstrompfades unbedingt kurz halten, die Transistoren so dicht aneinander wie möglich, die Leiterzüge so dick wie möglich. Jedes unnötige R versaut die Spannung. Auf primäre Absicherung achten. Die Brücke macht keinen Kurzschluss bei 11, also keine Probleme bei Reste-Condition oä. Über die Tarnsistoren kann noch in Sperrichtung eine Schutzdiode geschaltet werden. Die physikalisch im Fet enthaltene ist bei manchen Typen etwas schwach. Bei den Transitoren auf kleines Rds(on) achten. Die durchgeschalteten Fets müssen die Induktionsspannung des Motors abfangen. Je größer der R um so größer das U!
Die Schaltung produziert mit Sicherheit riesige Umschaltverluste. Die Fets sollten so schnell wie möglich durchgesteuert werden. 1M-Ohm ist da viel zu viel. Ohne Mosfettreiber (bzw. diskret aufgebaute Push-Pull Stufe) wird das meiner Meinung nach nix. Wie hoch kommst Du nun eigentlich mit der Frequenz? 1.000Hz oder 10.000Hz? Steffen
Nun, wenn ich die Rs unter 1MOhm dimensioniere kommt es beim umschalten der Fets dazu, dass kurzzeitig beide durchgeschaltet sind und somit ein Kurzschluss zwischen VCC und GND entsteht. Werden die Rs zu groß dauert die Umschaltung zu lange, der Motor baut eine gigantische Induktionsspannug auf und die FETs verrecken. Natürlich hängt die genau größe der Rs vom Gate-C ab. Am einfachsten geht es wenn man sich tau austechnet, aber genauer scheints damit nicht zu werden. 1kHz geht super, ist aber auf Dauer nicht zu empfehlen, weil mir der Motor dabei verreckt ist. 10kHz geht auch, ist aber definiv für die Brücke nicht mehr so gut. Die Wärmeentwicklung ist dann schon erheblich und ich denke die Brücke verreckt dann recht bald. Für definierten Kurzzeitbetrieb mit ausreichenden Ruhephasen könnte es aber noch ok sein. Bezüglich der Umschaltverluste hatte ich auch meine Bedenken, ist aber nicht.
Mit 1MOhm Vorwiderstand hast Du einen maximalen Strom von 12µA zum Umladen der Gatekapazität. Ich bin jetzt zu faul die Zeit an einem Beispiel auszurechnen aber das dauert ewig. Bei 10kHz werden die Fets wohl nie voll durchschalten und daher kommt auch die riesige Verlustleistung, die die Fets verbraten. Die Gegeninduktionsspannung des Motors hat mit dem Ableben der Fets nicht viel zu tun (vorrausgesetzt man verwendet externe Shottky Dioden). In der Praxis werden zum Umladen Ströme von 1A und mehr verwendet. Den Kurzschluss im Umschaltmoment muss man dann eben anders verhindern. Dass der Motor durch 1kHz PWM den Geist aufgibt, dass kann ich mir eigentlich nicht vorstellen. Sind die 10A der Maximalstrom bei blockiertem Motor? Steffen
Das ist ja alles ganz prima was Du hier einrechnest, und es ist schade, dass Du Dich an der Diskusion nicht schon ehr beteiligt hast, aber beim Umschalten mit künstlich generierter Pause (siehe Schaltung weiter oben) habe ich gigantische Spannungen auf der Leitung gehabt und nach wenigen Sekunden Pulsbetrieb mit 10 Hz hats die FETs zerrissen, trotz zusätzlicher, externer Shottkydioden und unipolarer Taz-Diode über dem Motor. Du magst sagen, dass es nicht an der induzierten Spannug lag, aber woran liegt es dann?? Was immer Deine Rechnung dazu sagt, die Zeit bis die volle VCC bzw 0 V, am Gate anliegen, liegt unter 250ns. Genau konnte ich es noch nicht messen, weil mein Scope es nicht hergibt. Ich bekomme aber die Tage eins mit dem ich es nachmessen kann. Und wenn ich bei 8A Dauerstrom die Transistoren nicht voll durchsteuern würde, würde wohl auch die Brücke schnell warm werden. Wird sie aber nicht. Ich messe zur Sicherheit aber heute abend noch mal den Unterschied zwischen Uin und Uout nach.
Ach ja! Das der Motor nach einer Stunde PWM Betrieb bei 1kHz, den Geist aufgibt ist für mich schon nachvollziehbar, weil die Induktinosspannung, die durch die Gegeninduktion hervorgerufen wird und der dadurch entstehende Strom, der ja nur durch Rcu+2xRDson begrenzt wird zusammnen mit dem Betriebsstom deutlich über der Spezifikation der Dauerstrombelastung für den Motor liegt und somit die Wicklungen um einiges überlastet werden. Das sie da warm werden und kaputt gehen ist nachvollziehbar, finde ich.
Der Thread ist mir erst letztens aufgefallen. Sonst hätte ich mich schon eher beteiligt. Hier findest Du einen Monsterthread zu dem Thema, der eine ganze Menge Infos enthält: --> http://www.roboternetz.de/phpBB2/zeigebeitrag.php?t=1730&highlight=hbr%FCcke Ich kann mir beim besten Willen nicht vorstellen, dass die Schaltung so zufriedenstellend arbeitet. Lasse mich aber gern eines besseren belehren. Die Oszi-Bilder würden mich sehr interessieren. Welche Fets setzt Du eigentlich ein? MfG Steffen
Hier noch ein Thread der ganz interessant ist: http://www.roboternetz.de/phpBB2/zeigebeitrag.php?t=2661&highlight= MfG Steffen
was hältst Du von der Idee, die Brücke einfach mal auf einem Steckbrett nachzubauen? Oszi-Bilder kommen Anfang de Woche ach ja. Transistoren habe ich verschieden ausprobiert, solltest Du immer nach Anwendungsfall in Spannung ung Strom dimensionieren. Ich habe gerade IRF 9540 und IRF540 im Einsatz
Keine schlechte Idee, momentan sieht es aber zeitmäsig nicht so gut aus. Ist dir eigentlich aufgefallen, dass es zu dem Thema fast nichts an Literatur gibt? Auch an Leuten mit Erfahrungen bei höheren Frequenzen (1kHz sind meist relativ unkritisch) sind hier und in anderen Foren leider recht rar. Ich habe hier eine einfache Steuerung (nur Drehzahl, keine Richtungsumschaltung über einen FET) für einen 36V 250W Motor mit rund 16kHz PWM Frequenz. Bis ich das einigermaßen zum Laufen gebracht habe sind mir einige Fets in Rauch aufgegangen.
Angehängte Dateien:
-

h-bridge.gif
83 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchte meine Brückenvariante auch noch in den Topf werfen. Die verwendeten FETs halten sehr viel aus und die verwendete Spannung kann deutlich über 40V liegen.
Das habe ich auch schon festgestellt. Ich habe es am Wochenende übrigens mal ausprobiert. So ab 2kHz tut sich komisches und ab 8kHz muss ich Dir Recht geben, steuern die Fets nicht mehr voll durch, darum werden sie dann wohl auch so warm. Auf der anderen Seite ist vermutliech ein Anwendungsfall für 16kHz PWM auch sehr rar. Ich könnte mir vorstellen dass ein Großteil der Anwendungen nur einen Bereich bis 1kHz abdecken muss, vieleicht zwei, aber dann ist schon Feierabend. Es quält sich die gemeine Gleichstommaschine bei 1kHz schon sehr und bei 10kHz fängt sie schon nach kurzer Zeit an übel zu stinken. Das sollte man dem gewöhnlichen Motor nicht auf Dauer zumuten, nehme ich mal an und die Leiche vom letzten Dauerlaufbetrieb scheint mir Recht zu geben. Das Problem ist die Umschaltzeit an sich. Ich hab es halt mit der Logic versucht, aber bei 400kHz Takt hat mein Transistor zur Invertierung leider die Umschaltflanke abgeschnitten. Erstaunlich war, dass die Totphase ja unter 1,25µs lag, das die Zeit aber ausreichte, um die Transisoren mit der Induktionsspannung zu zerschießen. Also wenn man es über Logig schaltet, wird das timing verflixt kritisch sein. Ich glaube sogar, dass es Vorteilhaft sein könnte, wenn sich die Schaltflanken kurzzeitig am Ende überschneiden. So ist der Kreis nie ganz offen und die Induktionsspannung kann sich nicht ungehindert aufbauen. fw
Das mit der Ansteuerung ist so eine Sache für sich. Es gibt hier auch schon einen Thread genau zu dem Thema. Ergebnis war aber, dass es notwendig ist bei höheren Frequenzen den Fet auch mit hohen Strömen durchzusteuern. 16kHz sind nicht unbedingt ein Sonderfall. Es gibt genügend Anwendungen, wo die PWM nicht als Pfeiffen oder Brummen hörbar sein darf. Bei der Steuerung von Brushless Motoren wird mit wesentlich höheren PWM Frequenzen gearbeitet (10*Maximaldrehzahl). Das ist aber wieder eine Sache für sich, wo die Entwickler sich anscheinend nicht gern in die Karten schauen lassen Was das Ableben des Motors anbetrifft, das kann ich mir immer noch nicht so richtig vorstellen. Die Motorinduktivität glättet ja den Verlauf der PWM. Je höher die PWM-Frequenz desto geringer müssten theoretisch die Stromripples sein. Der Strom durch den Motor müsste ziehmlich konstant sein. Bei deiner Schaltung werden die Fets aber hochohmig angesteuert, was meiner Meinung nach einen "schleichenden" Übergang der Zustände Leitend und Nichleitend zur Folge hat. Evtl. wird dadurch der Motor gegenpolig angesteuert, was dann die Zerstörung zur Folge hat. Alle PWM-Controller die ich kenne haben entweder eine fest eingestellte oder programmierbare Totzeit zwischen der Umschaltung der High- und Lowside Fets. Wo koppelst Du eigentlich die PWM ein? Es würde ja völlig reichen, den einen High-Side Fet voll durchzusteuern und nur den Low-Side FET per PWM anzusteuern. Die Verlustleistung wäre auf jeden Fall geringer. Für den Schutz der FETs würde ich generell zusätzliche Shottky Dioden einbauen. Die Body-Diode des FETs ist dafür eigentlich nicht gedacht. MfG Steffen
Hallo zusammen, ich verfolge die Diskussion auch schon ne Weile, weil ich für meine Diplomarbeit auch demnächst eine solche Brücke brauche (100V/8A). Eins verstehe ich nicht, warum soll es für die Gleichstrommaschine schlechter sein, eine hohe Schaltfrequenz zu benutzten. Der Strom wird doch viel glatter, einziges Problem bei sehr alten Maschinen war wohl die Isolierung, die die Spannungsspitzen nicht abkonnte. Ansonsten betreiben wir hier einen Umrichter mit 250V und 25KHz ohne Probleme. Ist allerdings keine Vollbrücke, sondern nur für eine Richtung, sollte an dem Prinzip jedoch nichts ändern. Ich will für meine Brücke vermutlich die Treiber IR2121 und IR2125 (Low- bzw. Highside) einsetzten, da ich ausdrücklich den Kurzschlussfall berücksichtigen muss, und diese Treiber Strombegrenzung und Abschaltung bieten. Das mit dem Widerstand von 1MOhm kommt mir allerdings auch komisch vor, ich kenne als Widerstandwerte eher 20-50 Ohm. Ein Hochsetzsteller aus unserm Labor hat eine Transistor-Treiber-Stufe und dann einen 33 Ohm Widerstand. Die Spannungsspitzen am Schalter liegen bei etwa 20V bei 100V Betriebsspannung, sind für die eingesetzten 200V MOSFETs also kein Problem. Aber Oszi-Bilder würden mich auch interessieren.
Nun, die 1MOhm Widerstände nutzendie Gate-Kapazität aus. So können, je nach Transistor, die Elektronen via Diode schnell ab/zufließen, um den Transistor zu sperren, der entsprechende Gegentransistor muss aber "warten" bis er aufgeladen ist, weil hier nur der Elektronenfluß über den Widerstand zu Stande kommt. Dadurch wird verhindert, dass beide Transistoren beim Umschalten gleichzeitig leitend sind. Wenn man den 1MOhm Widerstand nur geringfügig verkleinert,(800k) überschneiden sich die Kennlinien bereits und es kommt beim umschalten zum besagten Kurzschluss. Vergrößert man den Widerstand auf 1,5 MOhm kommt es zum genannten Problem, das die Fets nichtmehr voll durchsteuern. Die Sache mit den Treiber IC-s fand ich nicht so ausgereift. Irgendwer schrieb, dass die ICs beide Seiten durchsteuern können und einen Kurzschluss bauen. Das ist Mist. Nimmte der Prozessor irgendwelche undefinierten Zustände an, oder setzt, wie beim 8051 üblich, zum reset alles auf 1, fliegt einem die Brücke um die Ohren. Das kann nicht der Weisheit letzter Schluss sein. Ach ja. Ich pulse natürlich nur eine Seite der Brücke, bei zweisitigem pulsen würde der Motor ja in der anderen Richtung drehen <Für den Schutz der FETs würde ich generell zusätzliche Shottky Dioden einbauen. Die Body-Diode des FETs ist dafür eigentlich nicht gedacht.> Das ist natürlich richtig. Ich hoffe mal ihr könnt mir verzeihen, das ich sie in der Darstellung weggelassen habe.
Wie gesagt, bis jetzt musste ich immer nur eine Richtung ansteuern. Wenn ich jetzt aber keinen Denkfehler habe, dann passiert bei deiner Schaltung folgendes: Angenommen OK1 PWM, OK2 nicht durchgesteuert, dann ist der Low-Side Fet rechts unten leitend. PWM=Low --> Fet links unten leitend damit Motor über die Low-Side Fets kurzgeschlossen --> Bremsbetrieb PWM=High --> Fet links oben leitend damit Motor an Betriebsspannung Der Motor wird also ständig zwischen Betriebs- und Bremsmodus hin und her geschaltet und damit recht schnell überlastet. Deswegen brennt er auch durch. Richtig wäre es den rechten Low-Side Fet durchzusteuern und nur den linken High-Side Fet per PWM anzusteuern (oder besser andersherum). @Birger* Nicht dass es jetzt so aussieht als wollte ich nur an euren Schaltungen rummeckern aber auch bei Logig-Level-Fets (gehe mal davon aus, dass es welche sind) würde ich sagen, die Ansteuerung ist für höhere Frequenzen immer noch zu hochohmig.
@Steffen: Hab das so mal geätzt, mit den genannten Bauteilen aufgebaut und rumgespielt. Finde, das geht wunderbar. Fahre damit eine Bierflasche auf meinen Schreibtisch rauf und runter. Ein im Motor integriertes Poti gibt meinem ATmega128 die Position zurück. Das Teil gabs mal bei Pollin. Wenn die PWM lange am rumfiepen ist, werden zwar die ansonsten kalten FETs ohne Kühlkörper ein wenig warm, aber das juckt mich nicht. Ich finde die Zenerdioden wichtig für V+ >> 12V, denn sonst wird meiner Meinung nach VGS überschritten. Schließlich soll dieser Aufbau in einen langjährigen Einsatz kommen (Türsteuerung im Hühnerstall).
Das mit den Zenerdioden ist so auch OK. Bei geringen Strömen wird es mit der Verlustwäre auch keine Probleme geben. So viel wird dein Motor auch nicht an Strom verbrauchen oder? Bei höheren Leistungen wird man aber um einen Mosfet-Treiber oder eine diskret aufgebaute Push-Pull Stufe nicht herumkommen. MfG Steffen
Momentan frißt er mit der Flasche also fast ohne Belastung ca. 1A bei ~12V, was dann ja so 12W sein dürften.
Hi zusammen, wenn denn nur der linke HighSide Fet zur PWM genutzt wird(rechter LowFet immer an), würde beim Abschalten des HighSideFet's automatisch die BodyDiode des linken LowSide Fets leitend werden, da der Motor versucht, seinen Stromfluß aufrech zu erhalten. Da ist es schon besser, den gesamten Fet durchzusteuern, als nur die Bodydiode als Freilaufdiode herzunehmen, oder? Passiert aber andersrum genauso, also wenn der P-Kanal durchgesteurt bleibt, und man PWM mit den NFet's macht. Hier ist die Motorspannung beim Abschalten der N.KanalFet's größer als die Betriebsspannung und die BodyDiode des diagonal gegenüberliegenden PFet würde anfangen zu leiten und den Motor nun "oben rum" kurzschliessen, also auch Bremsen. Nur das jetzt in der BodyDiode knapp 1VoltxStrom verbraten wird und damit der Fet auf dauer abkocht. Dann lieber in der Zeit den betreffenden PKANAL Durchsteuern, dann verbrät man nur IxRds_on x Strom an Leistung. Das der Motorstrom bei PWM ANSTEIGT , ist ja klar - steht das noch zur Diskussion? Viele Grüße Axel
<Richtig wäre es den rechten Low-Side Fet durchzusteuern und nur den linken High-Side Fet per PWM anzusteuern (oder besser andersherum).> Um Himmels Willen! Das Ding wiegt ne Tonne! Bis der sich ausgetüdelt hat, hat die Induktionsspannug die ganze Elektronik zerrissen und die Positionierung ist auch zum Teufel. Nee nee dat ist man schon gut so! @Axel Du hast es natürlich schöner auf den Punkt gebracht ...
@Birger* 1A, das ist ja noch nicht so viel. Da ist deine Schaltung mit Sicherheit OK. Bei 10A und mehr sieht das schon anders aus. @Axel OK, Denkfehler erkannt. Du hast doch einige Erfahrungen bzgl. der FET-Ansteuerung. Was würdest Du zu den bisherigen Varianten sagen? Offen ist aber immer noch, warum der Motor bei höheren Frequenzen durchbrennt. Dass der Strom durch den Motor bei PWM-Betrieb ansteigt ist klar aber in dem Maß? MfG Steffen
Hmm, ich habe es ja i.d.R. mit 3Phasen Motoren zu tun. Da gibt es schon einige verschieden "Patterns" (um mal das englische Wort zu verwenden), wie die Ansteuerung solcher Motoren stattzufinden hat. Sitchwort: aktiver freilauf. Der Motorstrom steigt schon um einiges. Die Motorbelastung ist nun auch im PWM-Betrieb genauso hoch, wie bei Vollast. Wielange das der Motor mitmacht hängt vom Motor ab, würde ich sagen. Hängt auch mit der Konstruktion des Motors zusammen (Gegeninduktion, Gleichstromwiderstand der Spulenwicklung) Ist aber sehr komplex das Thema. Ich habe bei den Treiberherstellern viel in den Appnotes gelesen bei st.com und auch bei microchip ist da einiges zu finden. Axel
@Axel OK, die Muster(auf deutsch) sind freilich unterschiedlich. Das es ein komplexes Thema ist, das ist auch klar. Zitat: "Ich habe bei den Treiberherstellern viel in den Appnotes gelesen bei st.com und auch bei microchip ist da einiges zu finden." Vor allem bei letzterem (bin PIC-User) habe ich auch einige Stunden verbracht, aber nicht das gefunden, was ich eigentlich gesucht habe. Ich persöhnlich habe bisher einmal einen Fet für eine Steuerung von 36V/24A(max) eingesetzt und damit ein paar Erfahrungen gesammelt. Die sind aber meiner Meinung nach etwas notdürftig (fubktioniert zwar aber die Verlustleistung sollte sich minimieren lassen). Zur eigentlichen Frage zurück, was sagst Du zur Ansteuerung? MfG steffen
1Mohm im Gate ist zuviel. Definitiv. das Gate zügig umschalten max. 100Ohm serienwiderstand. Schnell ausschalten ist wichtiger. Im zündspulenfunkenthread finden sich uintersseante parallelen. Varistor parallel zum Fet? Axel
Bei 1k hab ich böse Kurzschlüsse beim Umschalten, ganz ohne Last. Das will ich nicht. Da knallen mir bei 24V die FETS weg. Das ist nicht der Sinn meiner Anwendung. Ich komme mit den 1MOhm prima klar. Die Brücke tut ganz genau das, was sie soll. Scope Bilder schicke ich später. Mein letzter Scope-Borger brauchts grade noch selbst.
naja, die P-Kanal werden ja auch nur mit 10Kohm entladen. Und die Gatespannung ist genausohoch, wie deine Betriebsspannung. Da wird der Pfeffer begraben sein... Ich krame mal, was ich an Teiolen da habe, vielleicht löte ich mal was zusammen. Aber wenn Du sagts, das es nun geht - nunja. dann lass'es halt so. Stört die hohe Gatespannung nicht? axel
habe was gefunden, ist zwar nicht mehr wirklich diskret, aber kannst ja mal drauf sehen.
nun, mit den Erfahrungen aus diesem Forum habe ich einfach mal angefangen zu experimentieren. Die Z-Dioden haben es voll versaut. Da ist dann ganz genau das passiert, was oben beschrieben wurde. Die Fets haben nicht mehr voll durchgesteuert und die Verlustleistung am Fet war Gigantisch. Ohne Z-Diode klappt es super. Man kann die 1Mohm und die Dioden auch ganz weglassen, so wie ich es früher gemacht habe, aber dann muss man mit einem dicken Widerstand den Strom beim Umschalten begrenzen und im Dauerbetrieb fällt natürlich auch immer mordsmäßig Leistung daran ab. Ich habe auch mal versucht, der ganzen Brücke einen Fet zum schalten vorzuschalten, den mit einem 10k Widerstnd zu überbrücken, dass an der Brücke immer noch ein Potentialunterschied entsteht und dann lastfrei umzuschalten, hat aber garnichts gebracht. War nur sinnlos aufwendig.
habe mal die pwm-seqenzen als pdf angehangen (habs tatsächlich wiedergefunden)
Hallo ich verfolge auch schon seit einer weile diesen Thread! Habe mal eine Prinzipielle Frage zur PWM und Brushless! Braucht man denn wirklich 3 einzelne PWM-Kanäle oder würde es nicht reichen, wenn man die 3 lowside's an normale Pins und über logik Transistoren auf einem PWM Kanal legen würde??? (Theorie: 6 normale Pins und 1 PWM Port ) Ich bin auch damit beschäftigt, einen Brushless Controller zu entwickeln und benutze nur N-Fets mit Treiber IR2102s! Gruß TeraByte
>Hallo ich verfolge auch schon seit einer weile diesen Thread!
Wo bei die Betonung auf "eine Weile" liegen dürfte.
Die "oberen" als Logikports und die "unteren" als PWM.
kann jeder Atmega48/88/168 (z.B.) ohne Klimmzüge, selbst alle sechs als
PWM auszulegen, wäre überhaupt kein Problem.
Ich darf aber trotzdem davon ausgehen, das das Thema hier im Forum
erschöpfend behandelt wurde.
Wenn Du also noch Logikgatter mit einbauen willst, steht dem nichts im
Wege. (Von Platz, Größe und Gewicht mal abgesehen).
Technisch möglich, aber völlig unnötig...
Axelr.
Hallo Axelr, ja klaro du hast sicher Recht, aber Benutzen tue ich ein Atmega8, der hat 3 PWM Ports und einer davon liegt auf MOSI! Hinzu kommt, dass ich 3 der 6 Fets per Transistor invertiert habe um evtl. Kurzschlüsse du z.B. Reset zu verhindern. Der IR2102s hat invertierte Eingänge (besser zu beschaffen, bzw. habe einige davon). Jetzt war meine Idee anstatt der 3 Transis, nur einen zu verwenden und den im Zuge dessen nur an einem PWM zu hängen. Glaube das könnte mir schaltungstechn. zu Gute kommen. Das mit dem MISO hat noch mehr Hintergrund, denn wenn ich den Atmega beschreiben will, steuert er mir nicht den FET (Treiber) durch. Software technisch werden doch sowieso alle 3 Kanäle Auf den gleichen PWM Wert (also synchron) getaktet. Es sei denn es würde sinn machen, jeden Kanal einzeln zu gewichten, aber das Glaube ich nicht! Gruß TeraByte
Um nochmal auf den TLE5206 zurück zu kommen... Den gibt es bei www.digikey.com Ein Blick in die Distributoren-Liste der Hersteller gibt darüber schnell Auskunft... mfg Reiner
TLE 5206 ist eine Vollbrücke. Reichen ihm für die Ansteuerung eines Bruschless nicht 3 Halbbrücken?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.