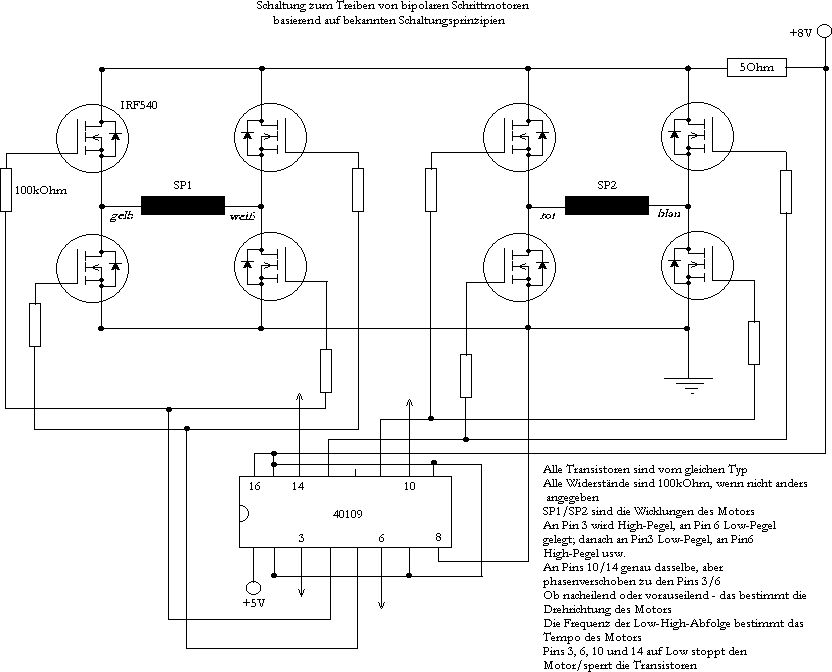
Hallo Leute, ich habe nach bekannten Schaltungsprinzipien eine Schaltung zusammengesteckt, mit der ich einen bipolaren Schrittmotor mittels entsprechender Impulse rechtsrum, linksrum, schnell, langsam und stoppen kann. Die Impulse schalten in jeweils einem Transistorblock (vier Transistoren) zwei diagonal liegende Transistoren durch; erst die einen, dann die anderen. Dadurch entsteht in den Spulen eine Wechselspannung. Der eine Transistorblock bekommt die Impulse gegenüber dem anderen Block verzögert (phasenverschoben). Die Drehrichtung des Motors hängt davon ab, welcher Block nacheilt/vorauseilt... Das Tempo der Impulse (1,0-Folgen) bestimmt das Tempo des Motors. Der Vorwiderstand ist wichtig; er begrenzt den maximalen Strom, der fließen kann, wenn alle acht Transistoren durchschalten; dies ist der Fall, wenn die Portpins des MCU-Systems High-Pegel haben (nach dem Einschalten z.B.); das Programm sollte also die 4 nötigen Portpins sofort nach dem Start auf Low-Pegel bringen, dann sperren alle acht Transistoren! Anschließend werden z.B. P1.0 auf High-, P1.1 auf Low-Pegel gebracht; diese Pins schalten den ersten Transistorblock. Etwas später (phasenverschoben) werden P1.2 auf High-, P1.3 auf Low-Pegel gebracht; diese Pins schalten den zweiten Transistorblock. Dabei schalten P1.0 bzw. P1.2 die Transistoren T1,T4 bzw. T5,T8 durch. Nach einiger Zeit werden P1.0 auf Low-, P1.1 auf High-Pegel bzw. - etwas später - P1.2 und P1.3 auf Low- bzw. Highpegel gebracht usw. Die vier Portpins sind 4 Transistor-Diagonalen zugeordnet. P1.0 ist zuständig für T1+T4, P1.1 für T2+T3, P1.2 für T5+T8 sowie P1.3 für T6+T7. Das MCU-Programm muß nur in regelmäßigen Abständen den Pegel an den Pins P1.0/1 bzw. phasenverschoben, d.h. mit z.B. 1/4 der Periode verzögert, P1.2/3 konvertieren bzw. für die andere Drehrichtung zuerst P1.2/3 und dann verzögert P1.0/1. Initialisierung: mov P1,#11110101b oder mov P1,#11111010b Die zeitliche Verzögerung ist das etwas komplizierte an dem Treiber-Programm. Bei mir lief der Motor und erzeugte bei einer Drehzahl, die in etwa dem Tempo einer 45er-LP entspricht, ein beachtliches Drehmoment! Klar, man kann auch einen L293, L298, L299 nehmen; aber diese Chips sind nicht so billig und bringen nicht den Strom, den die Power-Mos-Fets bringen. Schrittmotoren wurden in alten 51/4-Floppys, in Fax-Geräten, in ganz alten Festplatten eingesetzt bzw. sind manchmal als Restposten günstig zu erwerben; sie werden heute in noch größerer Zahl eingesetzt, als Servo-Motoren, in Robotern etc. In meinem Fall handelt es sich um einen weit verbreiteten Motor vom Typ 2Phasen-Gleichpol-Motor (bipolarer Schrittmotor) mit 2 Spulen intern sowie 2 als Zahnräder ausgeführten Dauermagneten (Anker); die Zähne (einige Hundert können es schon sein) bilden nur Nordpole bzw. bei dem anderen Zahnrad Südpole... Thomas
Angehängte Dateien:
-

bipolar.gif
15 KB
Ist doch nett, eine Schaltung als Anregung vorzustellen. Man muss ja nicht immer mit einem Problem hier rein kommen.
yo,stimmt ! Aber warum nen neuen Tread und nicht gleich in den alten der kaum 2 Stunden vor der Eröffnung von diesen hier die letzte Antwort erhalten hat ? http://www.mikrocontroller.net/forum/read-1-111531.html Ich fände es interessanter die Entwicklung seiner Schaltung in "einem" Tread zu verfolgen anstatt zu springen. my 2 Cent ;)
Angehängte Dateien:
-

bipoKupf.jpg
35 KB

Hallo Leute, ich habe inzwischen mit einem Programm von 1984 von der Firma Wintek die Schaltung geroutet, wobei ich 'per Hand' noch einiges abgeändert habe; anschließend habe ich mit der mühseligen Klebesymbolik-Auftragung auf eine Epoxyd-Platine das Layout auf Kupfer übertragen und nach dem Ätzen mit FeCl3aq und Bohren mit 0.8mm bzw. 1mm bzw. 1.5mm die Platine mit den Bauelementen bestückt. Diese funktionierte sofort; als Vorwiderstand habe ich einen Kaltleiter in Form einer 12V-Halogenglühbirne genommen; selbst wenn alle 8 Transistoren durchschalten, begrenzt dieser den Strom. Das Layout hat offensichtlich noch ein paar Schönheitsfehler, aber eine Drahtbrücke ist nicht nötig. Die Transistoren sollten mit jeweils einem Kühlkörper ausgerüstet sein (die Drains sind mit der Kühlfahne verbunden - daher scheidet ein gemeinsamer Kühlkörper aus bzw. müssen dann 4 Transistoren mit Glimmerscheiben isoliert werden). Ich werde in Kürze ein 8051er-Programm zur Ansteuerung des bipolaren Schrittmotors in die Codesammlung einbringen. Tom

Mach doch direkt einen Wiki-Eintrag draus. Fragen zur Ansteuerung von (bipolaren) Schrittmotoren tauchen schließlich immer wieder auf...
@Thomas: Du setzt eine Halogenlampe als "Sicherung" ein, mach ich auch gerne. Deine beiden H-Brücken sind ansich üblich. Ich habe über einen anderen Thread eine "verriegelte" H-Brücke gefunden, die Idee lässt sich mit einigen NPN-Transistoren auch bei einer MOSFET-Brücke umsetzen. Dabei wird beim Ansteuern eines Highside-Transistors die Ansteuerung des Lowside-Transistors kurzgeschlossen, also verhindert. Schau dir das mal an: http://www.bobblick.com/techref/projects/hbridge/hbridge.html Es geht dabei nicht um die komplette Schaltung, sondern um die Idee mit der Verriegelung. ...
Angehängte Dateien:
-

TMC_Power_Solution.jpg
140 KB

Moin Moin, es ist richtig, das man durch die Verwendung von MOSFETs mehr power bei geringerer Fläche bekommt. Die vorgstellte Lösung ist allerdings auch längst nicht auf dem aktuellen Stand der Technik. Als Anlage ein Foto auf dem man sehen kann, wie man mit weniger Aufwand als L29x eine moderne Schrittmotor-Endstufe mit 3A aufbauen kann. TMC239 oder TMC249. Guido Gandolfo ww.trinamic.com
Angehängte Dateien:
-

bipola3.jpg
180 KB

Hallo Guido, ja, ich meine auch, daß die L29x-Typen nicht den modernsten Stand der Technik darstellen. Es sollte sich inzwischen herumgesprochen haben, daß es MOS-FETs gibt. Es gibt inzwischen moderne, integrierte Schrittmotor-Treiber, die eine Menge Ampere liefern. Der Nachteil ist, daß man sie nicht unbedingt beim Bastelshop um die Ecke bekommt. Die von mir vorgestellte Schaltung hatte allerdings den Nachteil, daß sie nicht kurzschlußgesichert ist. Das habe ich jetzt geändert, indem ich die Schaltung noch um ein paar NAND-Gatter bereichert habe (1 Standard-Logik Chip zusätzlich, siehe Schaltplan/Foto). Ich habe sie erstmal zusammengesteckt und getestet - sie scheint zu funktionieren. Ein Programm für die Polung der Pins P1.0-P1.3 werde ich in Kürze veröffentlichen. Die Schaltung ist relativ einfach und enthält sicher keine genialen Schaltungstricks - das können andere sicher besser. Sie soll mehr als Anregung dienen. Thomas
Angehängte Dateien:
-

bipola3.jpg
200 KB

Hallo Leute, ich habe den Schaltplan nochmal durchgecheckt und ein paar Schönheitsfehler entdeckt - vor allem natürlich die 2 dunklen Vierecke unten. Deswegen stelle ich den schöneren Schaltplan nochmal ins Forum mit Angabe des eingesetzten Schrittmotors. Außerdem sende ich ein für 8051er geschriebenes Programm zu diesem Schaltplan. Ein Programm, daß dank Erläuterungen zu den Befehlen auch ohne Probleme auf Atmels oder PICs oder ST6er oder Z8er umgeschrieben werden kann. Das Programm tut nichts als den Motor ein wenig in Bewegung zu setzen. Der von mir entwickelte Schaltplan bipola3.jpg kann bipolare Schrittmotoren im Vollschritt-Betrieb laufen lassen. Will man außerdem 1/2-, 1/4-, 1/8- oder Mikroschritt-Betrieb, muß man auf handelsübliche ICs zurückgreifen. Das kann eine relativ einfache Schaltung wie die von mir vorgestellte nicht leisten. Aber sie ist gut für Demonstrationszwecke und für einfache Anwendungen und entspricht den schon lange bekannten Schaltung mit bipolaren Transistoren, nur daß eben CMOS-Technologie und MOSFETs eingesetzt werden. Die MOSFETs können auch von anderem Typ sein - dann müssen die Vorwiderstände(im Gate-Kreis) ausprobiert werden. Z.b. sind für den leistungsstarken Typ IRF3205 wesentlich kleinere Vorwiderstände erforderlich (10...20k). Es kann sein, daß man die Vorwiderstände auch ganz weg lassen kann. Ich habe aber mit dem Verwenden von Gate-Vorwiderständen gute Erfahrung gemacht! Tom
Anbei noch das DEMO-Programm, um den Motor auch in Bewegung setzen zu können. Die Portpins sind an die gekennzeichneten Eingänge des Pegel-Wandlers 40109 anzuschließen. Tom
Angehängte Dateien:
-

TCM249.jpg
87 KB

@Guido ..Die vorgstellte Lösung ist allerdings auch längst nicht auf dem aktuellen Stand der Technik. ... klar, haben wir ja alle in der grabbelkiste. Wenn man den ganzen Tag damit arbeitet, kann auch Klug Rede schwingen. Wo bekommt man davon mal eben 10-20 Stk.? Reichelt hat den jedenfalls nicht. Farnell und RS-Components fallen ja wohl für die meisten hier eh aus. Du hättest aber schon auf die Strom-Choppering-Methode hinweisen können(statt der HalogenLampe), wenn Du offensichtlich so eng mit der Materie betraut bist. Nicht realisierbare Vorschläge kannst Du Dir in Zukunft klemmen, denke ich! Nett wären hilfreiche Tipps, die nicht NUR mit Trinamic zu tun haben. Sorry, aber ich mag das nicht... @Thomas möchtest Du die Halogenlampe ersetzen? Mit hilfe eines einfachen 555er und eines Strommesswiderstndes lässt sich hier einiges an Drehmoment hreausholen. Aber: ist nicht zeitgemäß! MfG AxelR.
Axel, sei doch nicht so ungerecht. Wir Hobbybastler können doch Fertigmodule von Trinamic kaufen, dann sind wir auf dem aktuellen Stand der Technik. Und Guidos Werbepostings haben sich dann auch gelohnt. Aber die unmoderne Stromchopperschaltung mit dem "B555" würde mich auch interessieren... Gruß... ...HanneS... 8-))
Hi Axel...., das ging dann wohl doch etwas nach hinten los. Google doch erst mal nach dem richtigen Typ TMC249, und nicht TCM249. Den TMC249 gibt es überall , auch bei Reichelt, und wie du weißt hab selbst ich ihn in der Grabbelkiste ;) Uns warum sollte man nicht auch als Nebenbei-Bastler auf dem Stand der Technik bleiben, und sich damit das Leben erleichtern. Realisierbar ist der Vorschlag auf jeden Fall.... ...ich schätze du bist am Montag mit Kaffee dran :) Grüße.... Thomas
ACH DU SCH..., da hab' ich ja wieder was angestellt. Naja, wär ja nichts neues. Sonst rutscht mir ja auch alles aus der Hand oder fällt runter oder ist einfach weg (wie meine Kaffeetasse). Warum solls mir HIER nicht auch mal passieren. @Guido Ich hoffe, ich kann das irgentwann wieder gut machen... AxelR.
Angehängte Dateien:
-

TMC249.jpg
97 KB

Da ist ja wirklich alles drinn! bis zu 4Ampere Phasenstrom mit allem schnickeldööö.. erstaunt @Thomas K. Jetzt entsinne ich mich auch, sowas schonmal fertig aufgebaut gesehen zu haben. ;-)) Kaffe (incl. Zuschlagstoffen) geht klar! Axel
"" Da ist ja wirklich alles drinn! bis zu 4Ampere Phasenstrom mit allem schnickeldööö.. Na dann aber auch die Feinheiten beachten: externe FETs sind dennoch notwendig (leider).
Für Profianwendungen am High-End (z.B. CNC) sehr empfehlenswert. Für einfache Bastelei mit Steppern aus alter Rechner-Peripherie einfach mal zu teuer. ...
Angehängte Dateien:
-

bipol3b.jpg
120 KB

Hallo Leute, ich habe mit einem Layout-Programm (Smartwork der Firma Wintek, Version 1.0 von 1984)ein Kupfer-Layout erstellt. Hier ist das Resultat. Ich habe es später wenig professionell mit ätzfesten Symbolen nachgeklebt und die Platine aufgebaut - sie funktioniert. Thomas
Angehängte Dateien:
-

ge_t.jpg
260 KB

Hallo, hier ist die geätzte Platine zu sehen - Lötaugen-Kleben ist auf die Dauer nicht die Lösung für die Platinen-Herstellung; höchstens gut für einfache Schaltungen und Muster.
Angehängte Dateien:
-

platine.jpg
230 KB

Hallo Leute, last and least die fertig aufgebaute Platine; hätte ich micht 100% an das PCB-Layout gehalten, wäre für die Lötstützpunkte mehr Platz gewesen. Thomas Strauß
Hi alle, ich sehe bei der Schaltung aber das Problem, daß alles mit n-Kanal-fet aufgebaut ist.Wenn die oberen (high-Side) Switches durchschalten. floatet deren Sourcepotential hoch.Dann wird aber das nötige Gatepotential nicht mehr ausreichen um das Teil ordentlich aufzusteuern. Laß' mal ordentlich Strom fließen, und Du wirst sehen, daß die oberen viel wärmer(heißer) als die unteren werden. guude ts
Angehängte Dateien:
-

BIPOL3.jpg
130 KB

Hallo Leute, Tatsächlich schalten die oberen FETs nur zu ca. 2/3 durch; das liegt sicher an dem nicht ausreichenden Gate-Potential, worauf der Kollege hinwies! Ich habe die Schaltung bzw. das Platinenlayout(siehe Foto) etwas abgeändert. Die Verbindung zwischen der positiven Versorgungsspannung für die ICs und der Betriebsspannung der Endstufe wurde aufgelöst. Nach Messungen mit einem Digitalmultimeter habe ich festgestellt, daß bei einer Betriebsspannung von +8V für die Transistor-Brücken und einer Versorgungsspannung von +12V für die ICs das Gate-Potential auch für die oberen Transistoren ausreicht, um diese voll durchzuschalten (zu sehen an der Spannung zwischen Source und Drain). Wenn der Motor 12V braucht, wird es etwas eng mit der IC-Versorgungsspannung (max. Grenzwert ist +18V). Der Aufbau mit komplementären MOS-Fets hätte den Vorteil, daß man nur eine Versorgunsspannung braucht und daß die Schaltung (quasi als Leistungs-Inverter wie in CMOS-Schaltkreisen) in sich schon kurzschlußfest ist. Der Nachteil ist die Beschaffbarkeit der Bauelemente. Es gibt zwar P-Kanal-MOSFETs zu kaufen, aber wie ist es mit Komplementärpaaren? Denn diese sollte man denn schon verwenden, wenn die Schaltung professionell sein soll. Ich schau noch mal bei Google nach Angeboten. Bei Conrad und Kessler-Elektronik gibt es nicht viel Auswahl an P-Kanal-MOSFETs. Komplementär-Paare sehe ich da überhaupt nicht. Thomas Strauß
Moin, wir verwenden oft P- & N-Kanal MOSFET-Pärchen zusammen in einem Gehäuse z.B.: Siliconix SI7501DN, SI4539ADY, SI5504 International Rectifier IRF 9952, 7509, 5851 Fairchild FDS 8333C Alledings alle im SMD-Gehäuse und fragt mich bitte nicht wo es die gibt... Gruss, Guido
Wobei (zumindest bei IRF) die Daten der Highside und Lowside nicht unbedingt identisch sind...
Hallo, Ihr macht es euch ja nicht gerade leicht einen Schrittmotor zum laufen zu bringen. ;-) Ich verwende seit einiger Zeit diese (http://www.nanotec.de/page_steuerungen_imt901_de.html) in meiner Eigenbau CNC Fräse und kann von keinem einzigen Problem berichten. Tackt, Richtung, Spannung, Strombegrenzungswiederstände und FERTIG- das Ding läuft. Viele Grüße, Christian
Hi Hanes, frag mal bei nanotec nach (siehe oben), die sollten die haben. At Christian; kannst du da mal ein Bild von einstellen?
Angehängte Dateien:
-

bipolar.jpg
97 KB

Hallo Leute, ich habe mal eine Schaltung mit "komplementären" Power-MOS-Fets aufgebaut; mit N-Kanal IRF540N bzw P-Kanal IRF5305 (>30A, <0.06Ohm ON-Widerstand); ich habe 1Ohm/5W - Vorwiderstände eingesetzt; diese sollen im Falle eines Motor-Kurzschlusses die Transistoren am Leben erhalten bzw. als Gleichstromgegenkopplung wirken. Meine Messungen der zusammengesteckten (Kunststoff-Rasterplatte mit Bronze-Kontakten (Conrad-Elektronik, SLY electronik etc.)Schaltung ergaben bei 12V Betriebsspannung einen Spannungsverlust von ca. 0.01V an den durchgeschalteten Fets sowie 0.24V an jedem 1Ohm-Widerstand. Die Betriebsspannung war ca. +11.7V (Computer-Netzteil). Der Schrittmotor hat einen Wicklungswiderstand von 37.5Ohm. Im Dauerbetrieb wurde nur der Motor warm. Funktion: Die 4 nichtinvertierenden Pegelwandler des CMOS 40109 heben die Pegel des Mikrocontrollers (in meinem Fall 80C552)an, so daß die Fets schalten können. Die Transistor-Kaskaden werden innerhalb eines Blocks gegenphasig angesteuert. Außerdem besteht ein Phasenunterschied zwischen den beiden Blöcken. Th. Strauß
Der IMT901 ist die Apotheken(teuer) Version des TA8435H, der in D z.B. von Glyn vertrieben wird. Gruß, Holm
Hallo Leute, schaut euch mal den EMT241 an, bekommt man bei ELRA
Angehängte Dateien:
-

platine.jpg
230 KB

Hallo Leute, ich habe jetzt mal mit einem modernerem Programm als mit Smartwork V1.0 von 1984 eine Platine für die Schaltung zum Antreiben von bipolaren Schrittmotoren - nur Vollschrittbetrieb - hergestellt. Den Schaltplan und das Kupferlayout im TIF-Format maile ich im Anschluß. Th. Strauß

Angehängte Dateien:
-

Kupfer.jpg
400 KB

{kind=link}
Und das Kupferlayout im jpg-Format. Nicht im Maßstab 1:1, aber in hoher Auflösung.
Mit einem Wort: Wow. Stehe sprachlos vor dem ganzen Threat und Thomas' Ansporn. Stephan.
Hm, nur: wenn der Motor langsam dreht, heizt der Vorwiderstand, und wegen der niedrigen Spannung kann er gar nicht schnell drehen (oder zumindest bei hoher Drehzahl kein Drehmoment erzeugen, denn die Induktivität läßt den Strom nur langsam ansteigen, und Drehmoment ~~ Strom). Beides unter einen Hut zu bringen geht nur mit Choppen einer hohen Spannung. Schaut Euch mal von RTA Italien die GMD02 (55V 1,6..6A) bis GMD06 (180V 1,6..12A) und HGD01 .. HGD06 Fertigmodule an. Bin sehr zufrieden damit. http://www.rta-deutschland.de/sites/products_d.html Habe auch von IMS (Intelligent Motion Systems) die IB104, IB106, IB1010 in Verwendung, sind aber teurer und von der Störstrahlung schlechter. Außerdem weiß man nie genau, ob sie im Full-Step- oder im Wave-Mode sind (sie haben einen L297 drin, aber weder RESET noch HOME sind herausgeführt). Mechanisch sind sie recht praktisch.
>Der Vorwiderstand ist wichtig; er begrenzt den maximalen Strom, der >fließen kann, wenn alle acht Transistoren durchschalten; dies ist der >Fall, wenn die Portpins des MCU-Systems High-Pegel haben (nach dem >Einschalten z.B.); das Programm sollte also die 4 nötigen Portpins >sofort nach dem Start auf Low-Pegel bringen, dann sperren alle acht >Transistoren! Das ist murks. Bedenkend, dass es auch noch eine Zeit gibt, wo der Controller nicht programmiert ist, waeren pulldowns die bessere Loesung.
Und wieder einer, der aus nichtigen Gründen einen uralten Thread wieder rauskramt... Leute, habt Ihr nix besseres zu tun?
Johannes M. wrote: > Und wieder einer, der aus nichtigen Gründen einen uralten Thread wieder > rauskramt... Leute, habt Ihr nix besseres zu tun? Sommer-Loch?? ;-) ...
Hannes Lux wrote: > Johannes M. wrote: >> Und wieder einer, der aus nichtigen Gründen einen uralten Thread wieder >> rauskramt... Leute, habt Ihr nix besseres zu tun? > > Sommer-Loch?? > > ;-) > > ... Sommer? Welcher Sommer? Hast Du den etwa irgendwo gesehen? Oder ist der in sein eigenes Loch gefallen? regnerische Grüße johnny.m
Hi Thomas, ich bin grade dabei eine Ansteuerung aufzubauen und würde mich sehr freuen wenn du einen Blick auf die Schaltung wirfst und mir deine Meinung sagst. Ich habe deine Schaltung als Basis verwendet. siehe Beitrag: Beitrag "Re: Schrittmotor Ansteuerung" Ich hoffe du kannst mir weiterhelfen. Danke im voraus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.