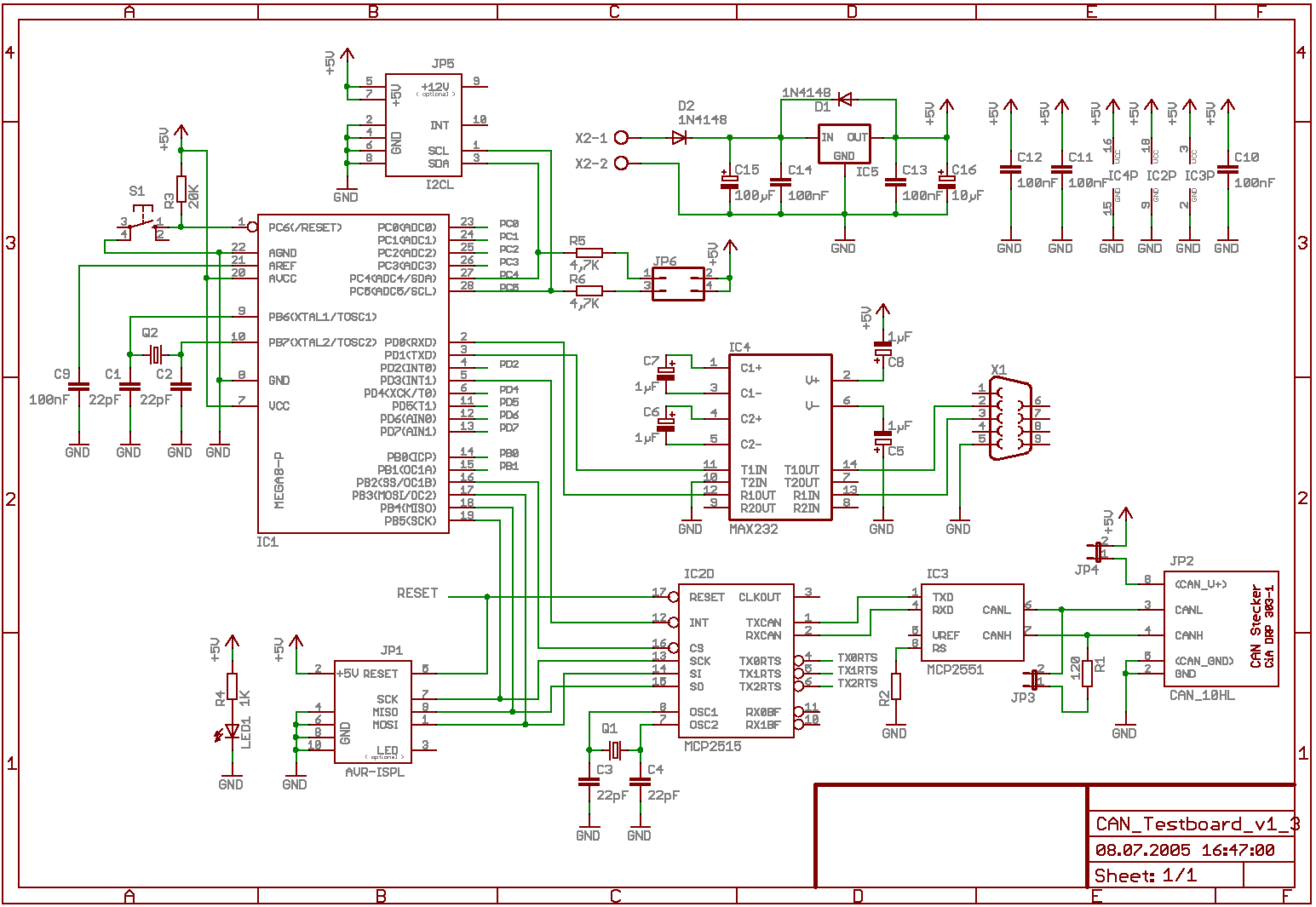
Hallo, Ich möchte gerne über einen MCP2515 den Empfang einer Nachricht an einer LED anzeigen lassen. Mit Hilfe von http://www.kreatives-chaos.com/artikel/ansteuerung-eines-mcp2515 http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial habe ich es bereits geschaft das eine Nachricht vom Controller zum PC(Vector CANalyzer) geschickt wird. Die Anbindung des MCP2515 zum ATMega8 ist dem CAN Testboard nachempfunden. http://www.kreatives-chaos.com/artikel/can-testboard Siehe auch Anhang: schaltplan.png Beim Empfangen einer Nachricht komme ich nun aber mit meinen bescheidenen Kenntnissen nicht mehr weiter. Ich glaube hier liegt auch ein prinzipielles Verständnisproblem vor. Im Anhang: Test4.c mein Code (ich arbeite mit CodeVision) Danke im Voraus für die Unterstützung. mfg Patrick
Angehängte Dateien:
-

schaltplan.png
27 KB
Da gibt es mehrere möglichkeiten. ich hab das damls per Software realiesiert, du könntest aber auch den interruptpin Nur für den Empfang einer Botschaft im CAN-Controller einstellen, und den Interruptpin Als Anschluss für eine LED nutzen. Oder die RXD Leitung zwischen dem CAN-Controller und der Endstufe. Ich würde dir aber eine Softwarelösung ans Herz legen gruß Rene
Nun, du hast bereits in der Initialisierung den Interrupt-Ausgang des MCP2515 eingeschalten: mcp2515_write_register(CANINTE, (1<<RX1IE)|(1<<RX0IE)); Hat dieser eine komplette Botschaft empfangen, wird am Atmega der Interrupt 1 ausgelöst. Darauf musst du nun reagieren: unsigned char mcp2515_read_rx_status(void) unsigned char can_get_message(CANMessage *p_message) Ob der Impuls lange genug ist, dass du an einer LED was siehts, weiß ich jetzt nicht.
Dies war vielleicht unglücklich ausgedrückt. Die Anzeige einer LED sollte nur der erste Schritt sein. Als weiteren Schritt möchte ich natürlich CAN-Botschaften empfangen und entsprechend darauf reagieren. Leider scheitert es aber an der Softewarelösung. So wie ich das verstanden habe kann ich über den Interupt-Pin den Empfang einer Nachricht ermitteln. Und jene Nachricht anschließend über SPI abholen. Wenn man es halt richtig macht xD, aber wie? mfg Patrick
Na auch über die SPI-Schnittstelle, aus dem entsprechenden Empfangspuffer RXD1 oder 2. Die SPI-befehle sind alle sehr ausfürlich im Datenblatt des MCP2515 beschrieben und wie eine SPI-Schnittstelle mit einem AVR angesprochen wird ist hier zu hauf beschrieben.
Um die SPI musst du dich gar nicht mehr kümmern, das mach die fertige Routine unsigned char can_get_message(CANMessage *p_message) vom Creativen Chaos schon für dich. Du musst diese nur noch aufrufen, wenn INT1 ausgelöst wurde und schon liegen die Daten vor. Was du dann damit machst ist natürlich noch offen. Als erstes brauchst du aber erst mal eine Interrupt-Routine zu INT1. http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial#Programmieren_mit_Interrupts
Also, erstmal legst du dir eine Variable an, die nur für den Empfang
benutzt wird:
CANMessage Receive_msg;
Kommt dann der Interrupt des MCP, liest du die Botschaft aus:
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
{can_get_message(&Receive_msg);
CAN_message_received=1;
}
Damit wird schon mal die gesamte Botschaft aus dem CAN-Controller
gelesen und der Interupt zurückgesetzt.
In der main prüfst du nun, ob die Bitvariable CAN_message_received
gesetzt ist.
Wenn nicht, ist auf CAN-Seite nichts zu tun.
Wenn doch:
if (CAN_message_received)
{CAN_message_received=0;
#asm ("cli")
...tue was mit der Botschaft...
#asm ("sei")
}
Hallo, habe heute wieder etwas Zeit gefunden mich mit dem Thema auseinander zu setzen. Nach einiger Zeit konnte ich alle offenen Punkte umsetzten und einige kleine Fehler ausbessern. Im Anhang noch mal der Code, falls mal wer vor den gleichen Problemen stehen sollte. Recht herzlichen Danke für die freundliche Unterstützung.
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
{
can_get_message(&Receive_msg);
CAN_message_received=1;
printf("Interrupt CAN Nachricht empfangen\r");
}
Das ist ganz ganz schlecht....
Weil Interrupt möglichst kurz sein sollte? Ist mir klar ist ja auch nur ein Programm zum testen und verstehen, aber danke für den Hinweiß.
Das blöde an solchen Testsachen: werden dann gerne vergessen, weil es ja funktioniert hat. Sollte man sich gar nicht erst angewöhnen. Und da du auch noch die UART im polling verwendest, dauert die ISR tatsächlich so lange, wie das Senden des strings dauert. Interruptbetrieb und ausreichender Sendebuffer entschärfen das teilweise.
Einen schönen Abend die Herren, ich habe meinen Aufbau und das Programm erweitert. 2x MCP2515 welche Botschaften empfangen und auf den jeweils anderen ausgeben sollten. Prinzipiell kann jeder MCP2515 Botschaften schicken, aber aus einen mir unerfindlichen Grund, wird der Interuptpin der MCP2515 nach dem Empfang einer Botschaft, nicht residiert. Da mir auf den ersten, zweiten und dritten Blick nichts mehr auf und eingefallen ist wollte ich mal hier nachfragen ob wer einen Tipp hätte? Danke im Voraus. mfg Patrick
Hallo Pattrick, hört sich interessant an mit 2 x MCP2515, bist du da schon weiter gekommen ?????? Gruß Schorschi
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.