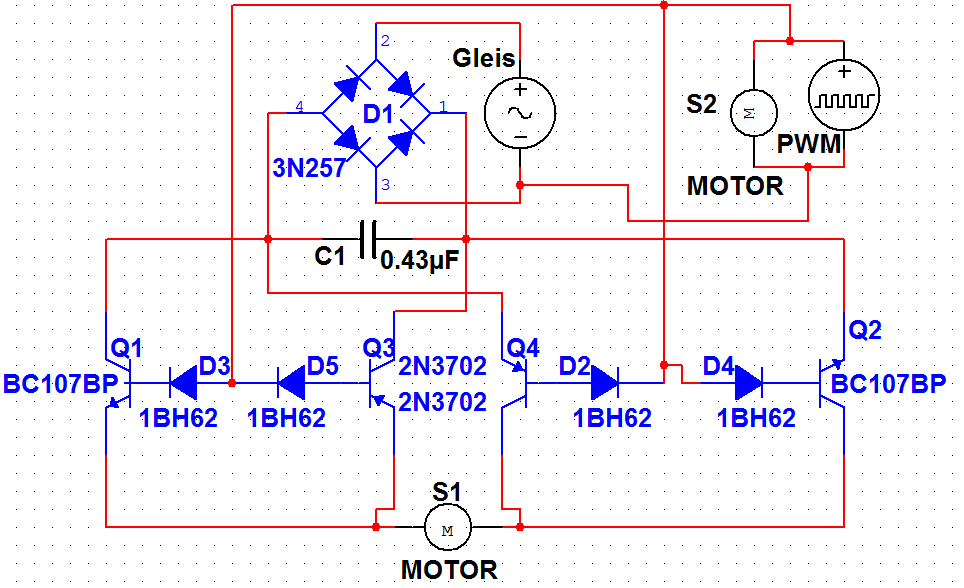
Servus, ich habe vor meinen ICE 3 umzubauen und wie im Original den Wagen 1,3,6,8 mit je 4 angetrieben Achsen zu versehen (heißt pro Wagen 2 Motoren) Dabei ist mir der kleine Motor von Motraxx (http://www.conrad.de/ce/de/product/235308/X-TRAIN-ELEKTROMOTOR-M30VA/SHOP_AREA_19779&promotionareaSearchDetail=005) in die Hände gefallen, der mit wenig Mühe in das Drehgestell passt. Nun habe ich jedoch das Problem, dass der Lokdekoder nur einen Motor regeln kann und vermutlich, wenn mehrere parallel geschalten sind, er sicherlich nicht mehr ganz der Aufgabe nachkommt. Ich hatte mir auch schon etwas ausgedacht, wie man in dem Bild erkennen kann, allerdings bin ich mir nicht so sicher, ob er das tut was ich verlange. Habt ihr eine Idee, wie ich das lösen kann, oder ist es einfacher die Lastregelung auszuschalten und das Gleichstromsignal (Vorher PWM) mittels eines ICs in PWM Signale umwandle und der IC dann die Lastregelung übernimmt. Hier (http://www.skilltronics.de/versuch/elektronik_pc/l293.html) hatte ich auch noch einen IC gefunden, der wohl PWM-Signale weiterreichen kann. Soll es das sein, da er auch gleich 2 Motoren steuern kann, die ja Pro Wagen vorhanden sind? Und übernimmt er dann die Lastregelung? Kann der L293D denn positive und negative PWN Signale weitergeben, oder muss ich das PWM-Signal durch ne Spule jagen(damit es Gleichstrom ist) und dann für die Drehrichtung an den L293D anschließe. Gruß Lepus
Angehängte Dateien:
-

Motorsteuerung.png
12 KB
Angehängte Dateien:
-

Motorsteuerung_L293D.png
9,4 KB
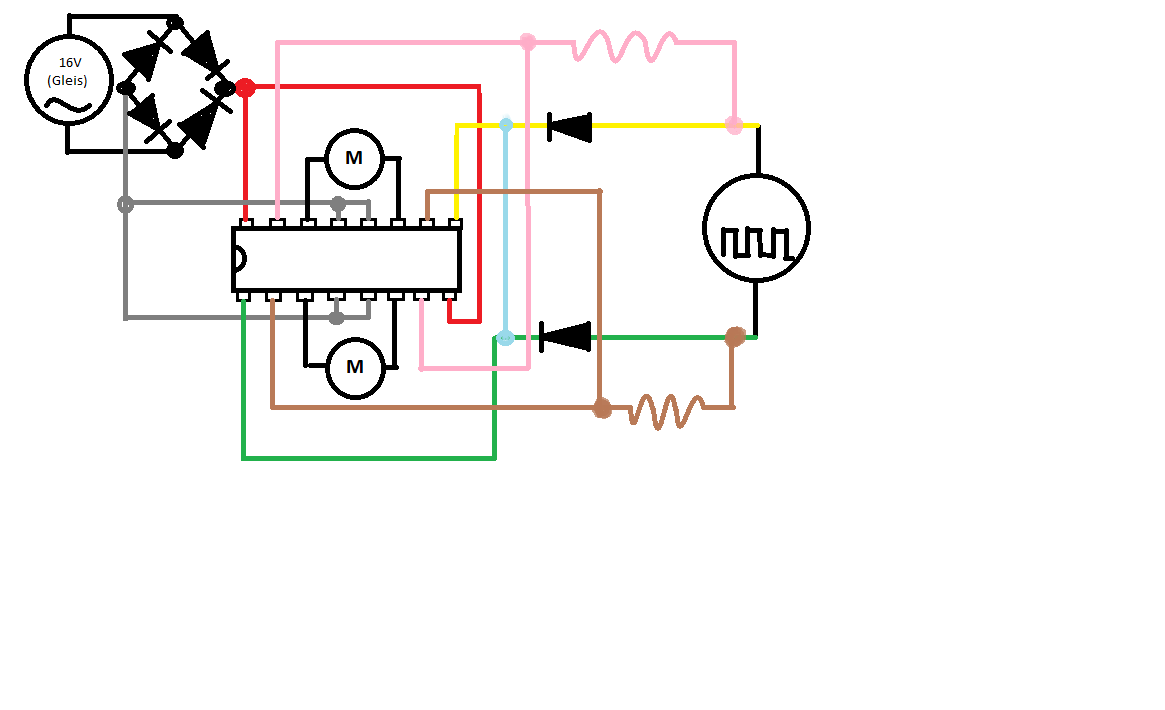
Ist das dann so richtig? Ich weiß halt nicht, wie ich die PWM-Quelle erden muss, da ich den Aufbau des Lokdekoders nicht kenne, aber ich kann sagen, dass er auch logischerweise an der Gleisquelle dran hängt. Gruß Lepus
Nabend, ich habe die Idee mit dem L293D verworfen, da er eigentlich nur dazu dient, die Richtung zu ändern, dafür geb ich keine 1,2€ aus. Hab sozusagen dementsprechend die erste Skizze wieder aufgegriffen und ein wenig verfeinert. Auf Grund dessen, dass ich jetzt die Lastregelung verstehe (http://www.der-moba.de/index.php/Wie_arbeitet_die_Lastregelung%3F), hab ich mir jetzt Gedanken gemacht, wie ich den einen Kreis vom Dekoder vollkommen entkoppel, aber doch das PWM Signal durchlasse. Wenn die PWM-Spannung 0 ist, gibt der Motor eine generatorische Spannung an den Dekoder ab, diese soll aber nicht den Transistor betätigen, der die Spannung für die anderen Motoren steuert. Heißt also, ich muss die Spannung vom PWM-Signal und der generatorischen Spannung auseinanderhalten. Und da die generatorische Spannung immer kleiner der des PWM-Signals ist, hatte ich mir gedacht, dieses mit einem Mosfet pro Drehrichtung zu lösen. Nur weiß ich jetzt nicht mehr genau, wie man den Mosfet schalten muss. Nehmen wir an, ich habe eine Eingangsspannung von maximal 16V (PWM) und er soll alles unter 14V herausfilter, muss ich dann das mit einem Spannungsteiler lösen? Und wenn ja wie? Und wenn nicht, wie dann? Gruß Lepus
Es gibt gute Gründe, warum man auf der Modellbahn nur in Ausnahmefällen in Traktion fährt. - Die Motoren haben herstellungsbedingt Schwankungen. Gleiche Spannung / PWM ist nicht gleiche Drehzahl. - Die Lasten sind auf die Zuglänge verteilt nicht überall gleich. Bögen, Weichenstrassen. Unterschiedliche Drehzahlen wirken sich unangenehm aus: Vorn mehr als hinten: Der hintere Motor bremst unnötig, der Zug strafft sich und kann im Bogen entgleisen. Der vordere Motor braucht unnötig viel Strom. Hinten mehr als vorn: Der vordere Motor bremst, die Waggons schieben sich auf und können entgleisen. Bei der "richtigen" wird das entsprechend ausgeregelt. Du kannst: Jedem Motor einen eigenen Dekoder verpassen. Alle Dekoder auf die gleiche Adresse einstellen. Bei jedem Dekoder die Geschwindigkeitsrampe (Stellwert => PWM) individuell einstellen, so dass alle Motoren bei gleicher Einstellung die gleiche Drehzahl haben. Müssen die Dekoder halt können.
Gut klingt logisch, was ist aber wenn ich halt mit einem Dekoder fahre, der keine Lastregelung hat, somit jedem Motor eine eigene Lastregelung verpasse, indem ich die Spannung aus dem Dekoder glätte, dass es nur eine Gleichspannung ist, und diese dann für jeden Motor in ein lastabhängiges PWM-Signal umwandle. Was würdet ihr mir an der Stelle empfehlen? Sonst kostet jeder Dekoder mal eben 40€....
Zu diesem Thema habe ich diesen Thread gefunden. Beitrag "PWM mit Lastregelung" Allerdrings bin ich nicht mit dem Wissen gesegnet, wie ich das nun beschalten muss, wenn der Dekoder eine Gleichspannung ausgibt. Mir ist klar, dass ich dafür einen Atmel brauche, aber wenn ich das so sehe sind die kosten für das ganze wesentlich geringer als 8 Dekoder. Bewusst bin ich mir dem Umstand, dass ich wieder den L293D brauche. Aber wenn jemand mir da helfen könnte, wär ich dem sehr verbunden. Gruß Lepus EDIT: Dekoder kosten 18€ pro Stück. Trotzdem sollte man doch locker drunter landen!
>>halt mit einem Dekoder fahre, der keine Lastregelung hat Ich gehe von Dekodern ohne Lastregelung aus. Mit Lastregelung wird das noch schlimmer, weil da jeder seinen Kopf durchsetzen will. >>die Spannung aus dem Dekoder glätte, dass es nur eine Gleichspannung ist, und diese dann für jeden Motor in ein lastabhängiges PWM-Signal umwandle Da kannst Du auch gleich für jeden Motor das Signal von der Schiene abgreifen und der Steuerung des Motors zuführen. Sparst Du den Dekoder. Bei Deiner Variante bekommst Du immer Probleme mit der Bezugsspannung, da die Dekoder den Motor in einer H-Brücke ansteuern, Du aber die Versorgung Deines Motortreibers aus der Schiene abgreifen musst und das Steuersignal aus der Differenz der Brückenspannung (gesiebt). Das geht, aber nicht schön... Also entweder Du baust quasi Deine eigenen Lokdekoder, oder Du nimmst je einen fertigen pro Motor. Die hier sollten geeignet sein: http://www.conrad.de/ce/de/product/246925/LOKDECODER-LD-G-32-OHNE-KABEL/SHOP_AREA_20121&promotionareaSearchDetail=005 Btw: Welches Format, MM oder DCC?
Die Dekoder geben meistens PWM-Spannung ab, ist mit µC doch recht einfach. Wie soll aber die Lastregelung mit mehreren Motoren und nur einem Decoder funktionieren? Und warum sollen so viele Motoren in den Zug - der herstellerseitige ist wohl nicht ok? Deine Wünsche klingen etwas unverständlich. Probleme sind definitiv vorprogrammiert. Lese den Beitrag von Sven (Gast) nochmal durch, denn daß wird Dich erwarten. Aus eigener Erfahrung kann ich sagen/bzw. schreiben ;-), daß schiebende Kräfte (wenn z.B. Lok oder Motor hinten) zu unerwünschtem Zugverhalten führen können, eine Syncronisation hilft da auch nicht, da bei Steigungen, Gefälle, Kurven und Weichen dem Motor immer andere Bedingungen vorgegeben werden. ... nur so zum Nachdenken ... sagt pumm, ein 1:160er Fan
Mach doch einfach mal den selbstversuch: 2 Loks im Abstand von 100mm über mehrere Runden konstant schnell hintereinander fahren zu lassen. Wenn hier pro Runde bei einer sehr guten Einregelung 10mm abstand Entsteht ist das sehr wenig. Einen 8 Wagen Zug mit Zuglok, dann eine Schublok hinten dran wird auf jeden Fall zusammengeschoben oder gezogen. Den Haftreifen sei dank. Bei einer Zuglok und einer Vorspannlok mag das gerade noch funktionieren da sind die Kräfte nur über die 2 Loks verteilt. Oft wird sogar bei "Doppeltraktion" ein Lokgehäuse ohne Motor eingesetzt, das es so aussieht, als wenn 2 Loks den langen Zug ziehen. Grüße, Tubie auch ein N Bahner
4 Motoren sind wahrscheinlich übertrieben. Auch 2 Motoren sollten reichen. Die Begrenzung ist ja oft nicht die Motorkraft, sondern die Reibung zu den Schienen. Es sollte also das Gewicht vor allem auf den angetriebenen Achsen sein. Wenn es gleiche Motoren sind, spricht nicht so viel dagegen die Motoren auch einfach parallel zu schalten und dann einen Treiber zu nutzen. Die kleinen Motoren haben normal keine so steife Drehzahl: die Drehzahl paßt sich also an die Belastung an, wenn ein Motor mehr leisten muss, wird er automatisch langsamer und übernimmt so weniger Last. Das funktioniert vor allem dann gut, wenn das maximale Drehmoment des Motors zur Belastung passt. Dazu sollte das Getriebe stimmen und nicht zu viel Reibung haben. Ein Problem hat man aber beim langsamen anfahren. Die hier ist die Reibung und das Rastmoment in den Motoren selber die Begrenzung, und da können die Motoren leicht unterschiedlich sein. Mit mehr Motoren wird das eher schlechter, weil die Rastung in den Motoren einen größeren Anteil bekommt. Um das zu umgehen bräuchte es dann schon eine Drehzahlregelung mit Messung der tatsächlichen Geschwindigkeit - das ist aber eine ganz andere Herausforderung. Nur als Anmerkung: die Schaltung im ersten Post funktioniert so nicht, ein H-Brücke braucht doch etwas mehr als nur die 4 Transistoren. Da doch lieber ein L293D.
Hallo, ich verwende das DCC-Format. Auch wenn ihr immer auf das geschriebene vom Sven hinweist, ich verstehe die Logik dahinter, aber es ist ja so, dass wenn vorne der Motor langsamer wird, aufgrund einer Steigung oder einer Kurve, dass der ganze Zug kurzzeitig gebremst wird. Somit auch der Motor, an dem die Lastregelung dran hängt. Wenn jetzt der Dekoder diesen Drehzahlabfall dedektiert, regelt er den einen Motor nach. Hat aber die Konsequenz, dass aufgrund dessen alle das gleiche PWM-Signal erhalten wie der geregelte Motor, alle auch mehr Spannung bekommen, sodass nur einen kurzen Augenblick geschoben bzw. gezogen wird. Daher ist es wichtig, dass wirklich nur ein Motor vom Dekoder erfasst wird, und alle anderen entkoppelt sind und damit der Lastregelung nicht dazwischenfunken. Glaub das ist nicht so deutlich geworden. Außerdem wollte ich ohne Haftreifen auskommen. Daher auch ein verteilter Antrieb. Funktioniert beim Original auch. Dazu kommt, dass jeder treibende Wagen 300g wiegen soll und jeder rollende 200g (H0), weil geklagt wurde, dass auf Grund deren geringen Masse sie oft zum entgleisen neigen (unsymmetrische Aufhängung des Drehgestells). Dazu kam, dass der Motor im Bistrowagen untergebracht war und daher nicht mehr die Möglichkeit einer originalgetreuen Inneneinrichtung gegeben war. Gruß Lepus Edit: Wie schauts mit der Lastregelung vom L200 aus? http://www.datasheetcatalog.org/datasheet/stmicroelectronics/1318.pdf Figure 28 page 9 oder der hier: http://www.elv-downloads.de/service/manuals/36620_Drehzahlregelung_DC_Motor_V1_1_um.pdf nur ein wenig kleiner, da ich keine 10A brauch sondern max 0,2A
Hm, was ist, wenn ich einfach einen 12V Spannungsregler für diese Aufgabe nehme? Ich verbrate einfach alles an Spannung unter 12V über einen Widerstand gegen Masse (Generatorspannung) und alles darüber hinaus (PWM-Spitzen) die leite ich weiter zu den Transitoren. Da mach ich mal ein Bildchen zu.
> Dazu kommt, dass jeder > treibende Wagen 300g wiegen soll und jeder rollende 200g (H0), weil > geklagt wurde, dass auf Grund deren geringen Masse sie oft zum > entgleisen neigen (unsymmetrische Aufhängung des Drehgestells). Dazu > kam, dass der Motor im Bistrowagen untergebracht war und daher nicht > mehr die Möglichkeit einer originalgetreuen Inneneinrichtung gegeben > war ... mit 2000g und den kleinen Motoren - hast Du gleich einen Berg Drehgestelle als Ersatzware (wg. Wärmeentwicklung) bei PIKO bzw. Märklin geordert? Bist Du Betriebsbahner? Dann solltest Du ja wissen, daß die Stromabnahme eines der größten Probleme darstellt (Dreck, Staub, etc.). Die Fahreigenschaften würden trotz diverser Dekodereinstellungen auch nicht berauschend sein. Ich würde in diesem Fall einen (!) vernünftigen Motor mit Schwungmasse(n) suchen und den Bistro-Wagen umbauen. Unterhalb der Fensterfront ist doch Platz, dank der Kulisse am Fahrzeugboden. ... mein Unverständniss: eine 8tlg. Einheit, dann noch so einen Aufwand um etwas zu vermurksen. Und in der Modellbahnwelt muss man auch mit Kompromissen leben, da ja selbst die von Dir gewünschte Innenbeleuchtung nicht dem Vorbild entspricht. grüssend pumm
300 g für einen angetriebenen Wagen kommen mir plausibel vor, aber auch schon eher schwer, also mehr etwas für nur 1-2 angetriebene Wagen. 200 g für einen leeren Wagen ist eher zu viel - die Wagen sind normal leichter. Mit nur dem Motor ist je auch noch nicht getan, da gehört ein Getriebe zu. Für den direkten Antrieb ist Motor viel zu schnell.
Hallo Ulrich, gemäß der Orientierung von http://www.lokschuppen-dominik.de/Spur%20H0/Lok%20Umbau/ICE%203/Seite.htm hat er pro Wagen 100g hinzugefügt, also insgesamt 200g, weil er nur die beiden reinen Personenwagen in der Mitte befüllt hat und er hat nur einen fünfteiler, welcher schon bei 5% Steigung schwächelt (Zuggesamtmasse 180+220+450+220+180=1250). ich habe einen achtteiligen Zug, sodass man davon ausgehen kann, dass der Motor für 5% Steigung total unterdimensioniert ist, wenn es ein ganzer Zug ist. Dominik schrieb auch, dass die leichten Wagen aus den Gleisen bei Steigungsübergängen gehebelt werden, sodass ich mich zu den 200g pro Wagen entschied. Normal sinds 120g. Gemäß der Norm sind 112-145g. Auf Grund der höheren Masse entschied ich mich einen stärkeren Motor einzubauen, der dann ohne Haftreifen mit 300g pro Wagen genügend Gewichtskraft erzeugt, die die Kraft auf die Schiene bringen. Dazu verhält er sich allgemein viel träger, was bei Kurvenfahrten allgemein ein besseres Fahrverhalten an den Tag legen sollte. Dann störte mich das mit dem Bistrowagen, weshalb ich mir gedanken über einen verteilten Antrieb machte. Zu den mechanischen Komponenenten solltest dir keine Gedanken machen. Bin angehender "Maschinenbauer". Daher auch die (geringen) Grundkenntnisse in ET. Die Untersetzung habe ich auf 1:6-1:10 gewählt. Da ich bei einer angenommenen Lastdrehzahl von 10000 RPM bei 12V ausgehe (bis 14V ist lt. Conrad zulässig),wird er bei 1:6 ca 300km/h fahren, bei 1:8 225km/h und bei 1:10 180km/h. Zur Lagerung werde ich wohl Kugellager verwenden, die isoliert auf die Achse (Welle) kommen und mit dem Rad und dem Brückengleichrichter sowie Dekoder elektrisch verbunden werden, sodass nur geringe Reibmomente in radialer Richtung entstehen sollten. Die Drehgestelle werden eh von mir aus einer 1mm dicken PVC Platte geschnitten. Gruß Lepus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.