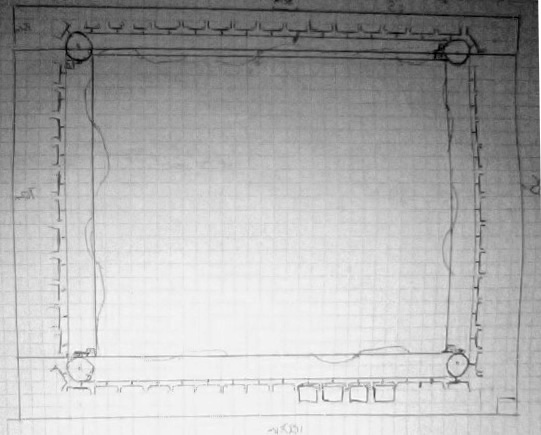
Hallo Community: Derzeit plane ich ein automatisches Fütterungssystem für meine Haustiere. Dabei können 52 Plexiglas Cubes (6cm Kantenlänge) mit Magneten an eine Förderkette gekoppelt werden, die die Cubes im Kreis führt. (* Skizze im Anhang) An der Entnahme-Position müssen diese Cubes oben und unten geöffnet werden, da die Seitenwände dann Teil eines Rohrsystems ist. Also müssen die Cubes an die Entnahmestelle gefahren werden, Deckel und Boden werden geöffnet und das Gebläse bläst den Inhalt aus dem Cube. Schuber Vs. Scharniere (Öffnen der Cubes) Wie schaffe ich es, mit einer einfachen Mechanik Deckel und Boden zu öffnen? Grundsätzlich will ich die Deckel- und Bodenplatten mit Magneten geschlossen halten, diese Platten stehen etwas über, damit sie am Entnahmepunkt in eine Schiene laufen können um geöffnet zu werden. Jetzt schwanke ich zwischen einem Schubersystem (Deckel und Bodenplatte laufen in Schienen in der Cube und werden seitlich herausgezogen) und einem System mit Scharnieren, wobei Decken- und Bodenplatte nach oben bzw. unten aufgeklappt werden. Favourisieren würde ich die Schubermethode, bin mir aber nicht sicher, ob sie das ganze beim öffnen/schließen nicht verkeilt, da ich bis auf die mechanischen Bauteile (Fischertechnik) alles aus Plexiglas bauen will. Gerne verwerfe ich dieses Konzept auch noch und lass mich von euch inspirieren. Reed Sensoren Vs. Helligkeitssensoren (Positionsbestimmung) Klar - um die Positionsbestimmung komm ich nicht drum herum, deshalb wollte ich eigentlich Reed Schalter verwenden, die auf einen Positionsmagneten auf dem Cube reagiert. Jedoch muss die Positionierung relativ genau sein (+/- 2mm) und zusätzlich läuft die Förderkette in beide Richtungen. Wenn Reed Schalter jetzt einen gewissen "Spielraum" haben, in dem sie schalten, dann ist die Positionierung der von links oder rechts kommenden Magneten auf den Cubes doch eher ungenau, oder? Deshalb hätte ich an Helligkeitssensoren gedacht, die auf einen schwarzen Punkt auf dem Cube reagiert. Funktionieren andere Möglichkeiten besser? Laser-Lichtschranken? Vielen Dank!
Angehängte Dateien:
Klingt zu kompliziert. Fragen: Wie viele verschiedene Tiere ? Welche Art (fein/grobkörnig - ausschließlich Trockenfutter ?) und vieviele verschiedene Futtermischungen ? Falls nur eine Tierart, warum dann so kompliziert mit Gebläse und nicht einfach nur Auffüllen per Schwerkraft ? Kann das Futter so angeordnet werden, dass die Aufgaben "sequentiell" abgearbeitet werden können ? Das heisst z.B. Box 1 -> Katzen Box 2 -> Hund Box 3 -> Hamster ... und dann wieder von vorne ? Oder unterliegt das Anfahren der Boxen eher keiner Regelmäßigkeit ?
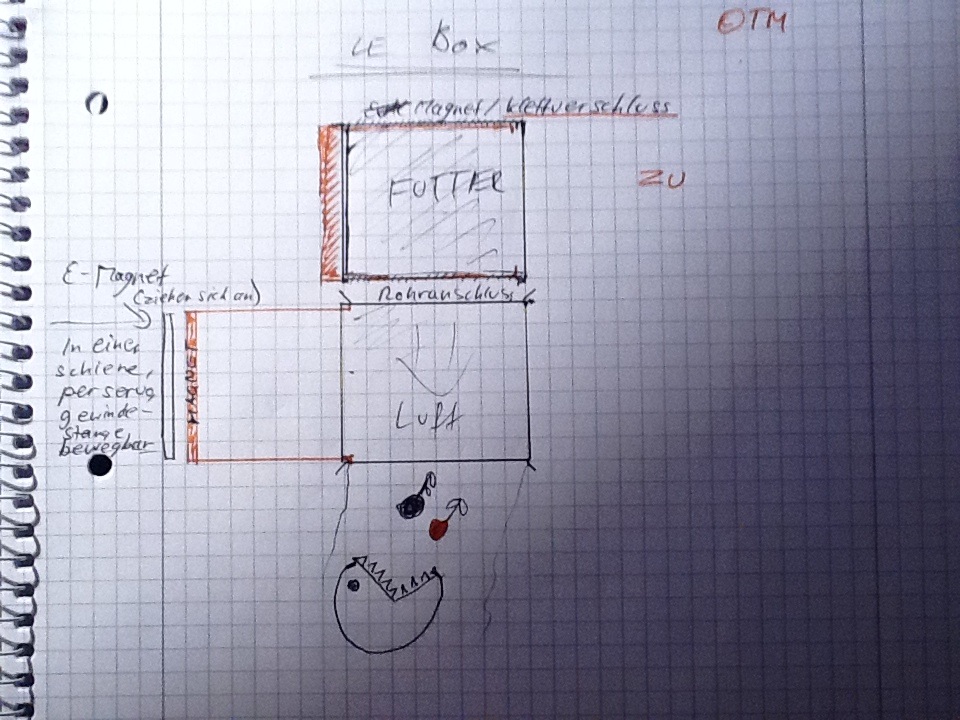
Kann es sein, dass das Essen noch lebt und wohl nicht freiwillig nach unten rutschen wird ^^. OT: Hätte da schon eine Idee, wäre aber etwas komplizierter... Ich lade mal ein Foto hoch.. Tm
Den Deckel sollte man zum Schieben machen und den Boden mit Scharnieren klappen lassen. Zum Entleeren könnte man dann einen "Einschub" bauen, der einen Lüfter enthält und den oberen Deckeln wegschiebt. Beim Zurückziehen, wird dann der originale Deckel wieder aufgeschoben. Um welche Viecher handelt es sich denn? Lebendfutter á la Tubifex?
Was spricht dagegen, die Deckel mit einer Feder geschlossen zu halten? Dann steht der Rand der Deckel nach hinten über. Fahren Sie nun an der Entnahmestation vorbei, kann entweder ein Linearer Aktor die Ränder drücken, und so die Deckel öffnen, oder wenn es nicht selektiv sein soll, einfach in eine Art Zulaufende Schiene reinfahren lassen, die die Deckel beim durchfahren öffnet. Also die Deckelränder durchlaufen ein U Profil, das immer Enger wird.
> Wie viele verschiedene Tiere ? > Welche Art (fein/grobkörnig - ausschließlich Trockenfutter ?) und > vieviele verschiedene Futtermischungen ? Der Haustier-Tower ist wie folgt aufgebaut: (von unten nach oben) * 40cm Technikbereich / Frischwassertank * 60cm Aquarium (Wasserschildkröten > Trockene Bachflohkrebse) * 100cm Terrarium (Taggeckos > Heimchen lebend) * 70cm Käfig (Ratten) (Trockenfutter) * 15cm Futterspeicher > Kann es sein, dass das Essen noch lebt und wohl nicht freiwillig nach > unten rutschen wird ^^. Bingo! Zu deiner Zeichnung: Hätte mir gedacht, dass Magneten an die Schuber andocken und sie rausziehen/reinschieben. Im Cube ist der Schuber auf Schienen geführt, beim Rausziehen sollten diese Schienen genauso weitergeführt werden, damit sich nichts verkeilt. Funkt das so? Der Vorteil der Schuber-Methode ist auf jeden Fall, dass das Futter nicht - wie beim Scharnier - gleichzeitig ins Rohr fällt/geblasen wird. ad Gebläse: Eigentlich nur gedacht, um Heimchenplagen in den Rohrleitungen zu vermeiden. > Kann das Futter so angeordnet werden, dass die Aufgaben "sequentiell" abgearbeitet werden können ? Die Anlage soll grundsätzlich alle Positionen zu jeder Zeit anfahren können, da sie nach dem FIFO Prinzip arbeiten muss, damit Heimchen nicht verhungern. Vielen Dank!
Es sollte sich eig. mit Plexiglas führungsleisten "kleben" lassen, musst halt einmal ausprobieren. Evtl. noch eine Zugfeder, damit sich der Cube wieder von selbst schließt. Eine Gewindesange vorne mit Magnet in einer Führungsschiene ( größer als der Schuberdeckel ). Dann mit Elektromagnet diesen entweder ausschalten oder einfach so weit wegfahren, bis die Feder das Kästchen schließt. Ich könnte mir zur identifikation der Kästen einen Barcode vorstellen, Barcode ps2 in Mega8 oder n rfid ettikett, wär aber overkill. Mit Barcode kann man auch einfach die Kästen irgendwo einklinken, er findet den Richtigen Tm und ich hoffe du zeigst uns allen der/die/das Gerät wenns fertig ist. :)
Wichtig ist, dass das ganze mechanisch relativ simpel aufgebaut ist, hab mit sowas nämlich noch nicht wirklich viel Erfahrung, hoffe, aber, dass ich das nach einigen Prototypen hinbringe. Für den Aufbau der Anlage hätte ich an Tischkreissäge + Plexiglas + Plexiglaskleber gedacht. Auch die Führungseinheit (oO) sollte hermetisch abgeschlossen sein, um einen Heimchenausbruch zu verhindern. Generell rechne ich für die "Kurvenfreiheit" 2cm Abstand zwischen Cube und Aussenwand ein, reicht das? Für das Öffnen und Schließen an der Entnahmestelle würde ich die Führungsschiene an den Cube annähern (zur Stabilität) und dann Boden und Deckel der Führungseinheit Richtung Frührungskette wegziehe. Da an der Entnahmestelle Cube-Deckel/Boden und Führungsschiene-Deckel/Bode mechanisch verbunden sind kann ich so die Schuber öffnen/schließen. Ich werde - sobald ich wieder zu Hause bin - meine Zeichnungen hier veröffentlichen, damit man sich das ganze Projekt besser vorstellen kann. Meine Frage wäre noch, wie man am besten die Bewegung zum Öffnen/Schließen der Cubes ausführt. Würde sich da um 6cm Weg handeln. Zugmagnete + Rückstellfeder oder Zahnstange + Zahnrad + Motor? ad Overkill: Meiner Meinung nach ist das ganze Projekt Overkill, aber interessant umzusetzen. Weitere offene Fragen: * Positionierung: Reed-Sensoren? Optische Methoden? hm... * Identifizierung: Gedacht hätte ich mir, dass ich Positionspunkte an den Schiffchen (= Slots für Cubes) anbringe, sodass beim durchfahren der Entnahmeeinheit die virtuelle ID bekannt ist. Da ich weiß wieviel Slots insgesamt vorhanden sind, habe ich somit auch einen virtuellen Nullpunkt, an dem der Zähler zurückgesetzt wird. (52 Slots gesamt -> Zähler bei 52 -> Zähler NULL setzen) Für jede ID speichere ich den Zustand des Slots: * Cube eingeklinkt * Cube voll/leer * Route für den Cube (wo wird hin geliefert? Aquarium/Terrarium/Käfig) * Datum der befüllung (für FIFO) so far, Danke...
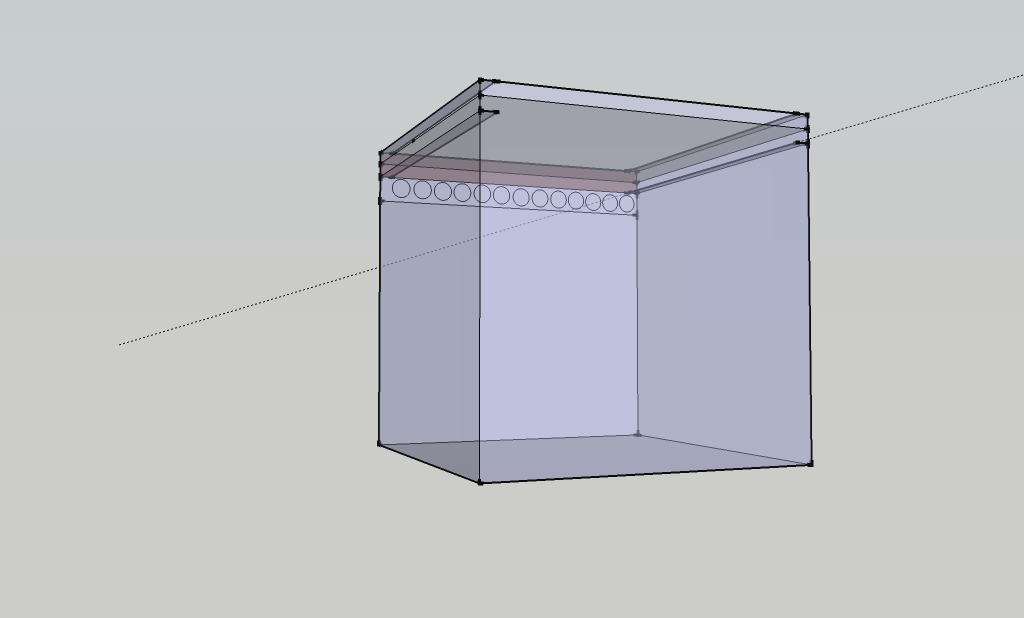
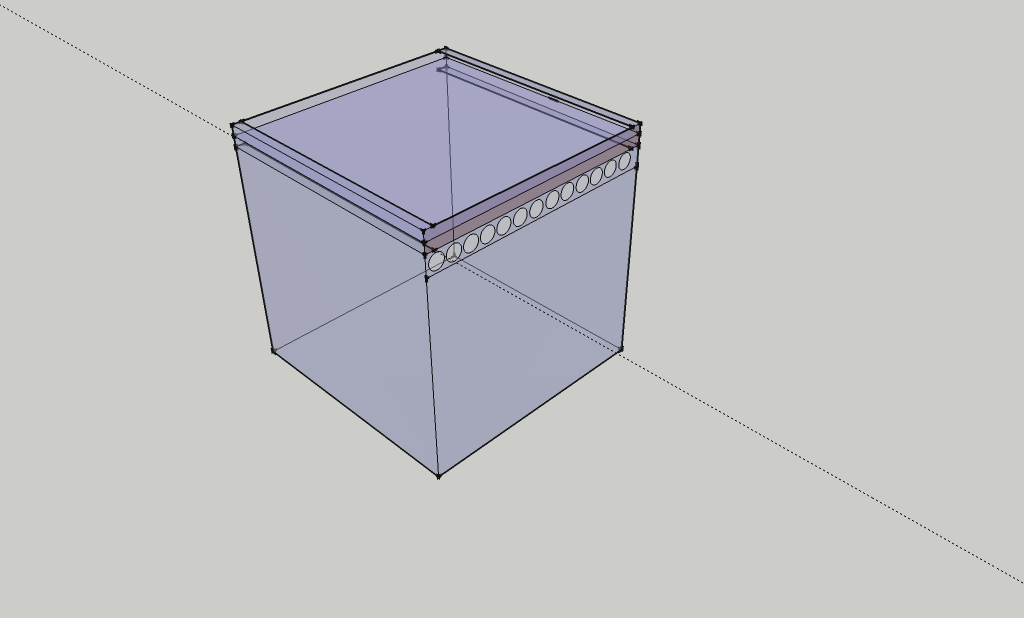
Anbei 2 Skizzen vom Cube. Vielen Dank!
okay, dann kannst du entweder wie in meiner zeichnung die beiden schuber miteinander verbinden ( noch eine Plexiglasscheibe, eventuell Metallstück auf das einfach ein starker magnet "gepappt" werden kann ) Wie lang sollen die Heimchen denn überleben in dem Cube, bzw.die Luftlöcher mit Gitter auszustatten wäre da du wert auf Optik liegst nicht die perfekte Wahl. Und deinem Post nach, hat also nicht der Cube an sich einen Code, sondern der Steckplatz oder? Weil dann wäre das mit den 2 Magneten kritisch, eventuell oben per einklemmen des Cubes lösen, zum Entleeren auf eine Art Förderband / Rutsche, könntest du gleich dein Reedrelais Prob. lösen, indem Servohebel o.ä. einen Anschlag geben, den Cube fixieren. Später einfach wieder Einklinken. Ach und was für eine Platform willste denn überhaupt nutzen? Tm
> okay, dann kannst du entweder wie in meiner zeichnung die beiden schuber > miteinander verbinden ( noch eine Plexiglasscheibe, eventuell > Metallstück auf das einfach ein starker magnet "gepappt" werden kann ) Grundsätzlich möchte ich die gesamte Technik zum Öffnen/Schließen/Belüften etc. innerhalb anbringen, um so eine maximale Förderkettenlänge erzielen zu können. Wenn die Schuber nach aussen geöffnet werden, muss ich mindestens 6cm der Gesamtbreite abziehen (= 2 Slots weniger) Wenn der obere und untere Schuber jetzt aber verbunden sind, ist die Förderkette im Weg. Ausserdem wäre schön, wenn sich beide Schuber unabhängig voneinander bewegen lassen. > Wie lang sollen die Heimchen denn überleben in dem Cube, bzw.die > Luftlöcher mit Gitter auszustatten wäre da du wert auf Optik liegst > nicht die perfekte Wahl. Die Führungswand ist mit einem Lüftungsschlitz in der höhe der Lüftungslöcher der Slots ausgestattet. Kleine Lüfter versorgen alle Cubes mit Frischluft. Ich habe ehrlich gesagt noch keinen Plan, wie lange ich die Heimchen in den Cubes lassen kann. Mit ein bissl Futter + Wasser sollten 10 Tage kein Problem werden - jedoch ist beim ausblasen halt alles weg ... Die Lüftungslöcher in den Cubes sollen nur 2-3mm groß werden, damit keine Heimchen ausbrechen können. Zwar jetzt nicht das Optimum, wird aber nicht anders gehen. > Und deinem Post nach, hat also nicht der Cube an sich einen Code, > sondern der Steckplatz oder? Weil dann wäre das mit den 2 Magneten > kritisch, eventuell oben per einklemmen des Cubes lösen Genau, die Anlage muss nur wissen, wann ein Slot am Entnahmepunkt vorbeigefahren ist, wieviele Slots insgesamt verfügbar sind und in welche Richtung die Antriebsmotoren drehen. > Ach und was für eine Platform willste denn überhaupt nutzen? Ich muss zugeben, dass ich mich erst seit ca 2 Monaten mit Microcontrollern beschäftige. Eigentlich aus dem Grund heraus, meiner recht trockenen C Vorlesung etwas mehr paxisnähe zu verleihen. Programmiere aber schon recht lange schulisch und privat. Neu ist für mich allerdings der ganze Elektronik-Bereich. Mit Motoren, Platinen und einem Lötkolben hab ich bisher recht wenig zu tun gehabt, wird sich aber lernen lassen, hoffe ich zumindest. "Cube" soll mit anderen Units (Terrarium/Aquarium, Media Control, Uhr, Light-Box, Raumüberwachung etc. etc.) in einem RFM12-Funknetzwerk dezentral zusammenarbeiten. Grundsätzlich gefällt mir der Atmel ATmega 644 recht gut, verwende den auch auf meinem Pollin-Board. Ich tendiere eher dazu, auf ein Evaluation-Board zu verzichten und die Schaltungen auf Lochrasterplatinen selber aufzubauen, hab aber keinen Plan wie schwierig sowas ist. Glaube aber, dass ich zur Zeit noch zu "grün hinter den Ohren" bin. Vielen Dank, Markus
Erstmal großen Respekt, RFM12 ist eine große Sache bis alles funktioniert. Allerdings würde ich das mit der Uhrzeit über einen externen RTC machen. Ist die Station hier die Basis oder nur ein Teil d. Netzwerkes ? >Grundsätzlich möchte ich die gesamte Technik zum >Öffnen/Schließen/Belüften etc. innerhalb anbringen, um so eine maximale >Förderkettenlänge erzielen zu können. Wenn die Schuber nach aussen >geöffnet werden, muss ich mindestens 6cm der Gesamtbreite abziehen (= 2 >Slots weniger) >Wenn der obere und untere Schuber jetzt aber verbunden sind, ist die >Förderkette im Weg. Ausserdem wäre schön, wenn sich beide Schuber >unabhängig voneinander bewegen lassen. ich dachte die SChuber werden nach vorne abgezogen, aber ok. Dann würde ich jedoch nur den unteren groß machen, den oberen nur so groß wie Luftstrom nötig ist um die Krabbeltiere komplett zu vertreiben. Den kleineren würde ich dann aber auch per Feder selbstschließend machen, sicher ist sicher. Und wie genau stellst du dir den Öffnungsmechanismus vor? Außerdem würde ich den unteren Schuberdeckel nach Entleerung des Cubes auf einen extra Stapel werfen, nicht wieder den Würfel schließen. Tm
> Erstmal großen Respekt, RFM12 ist eine große Sache bis alles > funktioniert. Hab ich schon gelesen, dass die Dinger recht kompliziert sind, hab aber keinen Zeitdruck :) Allerdings sind meine Anwendungen für einen Controller definitiv zu groß, deswegen sollen mehrere Units über RFM12 verbunden werden. Dezentral und verschlüsselt. Alle Units sollen alle Relevanten Informationen zu jeder Zeit anfordern können. Plane dazu auch ein eigenes Protokoll, dass den Anforderungen gerecht wird (Kollisionen vermeiden, ver- und entschlüsseln, Checksummen, gegenseitige Empfangsbestätigung etc) So sollen dann alle Units in einer großen Einheit arbeiten. > Allerdings würde ich das mit der Uhrzeit über einen > externen RTC machen. Ich dachte mir, dass eine Unit im Netzwerk eine Uhr ist (Auswertung DCF-Signal) und dieses als Unix-Timestamp ins Funknetzwerk idelt (an alle Units gleichzeitig, keine Empfangsbestätigung). In jeder Unit läuft ein ISR die den Timestamp einmal pro Sekunde inkrementiert. > Ist die Station hier die Basis oder nur ein Teil d. > Netzwerkes ? Dezentrales Netzwerk = keine Basis Kann aber noch sein, dass ich das im Laufe der Planung noch verwerfe, und auf eine zentrale Netzwerkeinheit setze, vor allem, da sowiso noch ein Router für TCP/IP gebaut werden muss. > ich dachte die SChuber werden nach vorne abgezogen, aber ok. Dann würde > ich jedoch nur den unteren groß machen, den oberen nur so groß wie > Luftstrom nötig ist um die Krabbeltiere komplett zu vertreiben. Was meinst du genau mit "groß machen"? > Den kleineren würde ich dann aber auch per Feder selbstschließend machen, > sicher ist sicher. Ich hab leider keinen Plan, wo ich diese Feder verbauen soll. Sie muss sich ja auf 6cm dehnen lassen, sollte aber in Neutralposition wenig Platz brauchen. Ausserdem sollte der Cube wirklich Würfelförmig sein, ohne Ausbuchtungen für irgendwelche Teile wie Federn. (ausgenommen Seite, die auf dem Slot eingeklinkt ist) > Und wie genau stellst du dir den Öffnungsmechanismus vor? Die Schuber haben haben Angriffspunkte aus Metall. Dieses Metall schleift auf Abstandhaltern an der Förderwand. Am Entnahmepunkt sind in die Abstandhalter kleine Magnete* eingelassen, und sie können nach hinten wegfahren und offnen/schließen so die Schuber der Cubes. (*bei normalen Magneten muss die Haltekraft so abgestimmt sein, dass der Cubes stäker an der Förderkette als an der Führungsschiene haftet, ansonsten Elektro-Magnet) > Außerdem würde ich den unteren Schuberdeckel nach Entleerung des > Cubes auf einen extra Stapel werfen, nicht wieder den Würfel schließen. Warum? Die Entleerung findet an der Rückseite statt, die Füllstation ist aber an der Vorderseite? Wie soll ich die Deckel praktischer Transportieren als in den Cubes? Vielen Dank, Markus
Hi, ich hab das mit dem dezentralen überlesen. Habe die Erfahrung, dass bei Projekten v.a. wenn man in die Atmega geschichte einsteigt und dann vorhat zig Module zu bauen das ganze verebbt. Du könntest aber auch zur Koordination des ganzen einen kleinen Embedded PC verwenden. Mit Linux und serieller Kommunikation zu Atmegas etc... ( Cron für die Zeittasks!) Außerdem muss die mit Feder verschlossene Seite auch kein Schuber sein, eventuell ein kleiner Kreis aus Plexiglas, welcher dann wenn die Lüftung angeht nach innen gedrückt wird ( also ein Ventil ). Das wäre dann aber evtl. was für V2 des Projekts. Und für was willste dann Ethernet einsetzen? Und sonst auf dem PC gäbe es Ethernet ( SSH, ncurses ), 2 oder mehr serielle Schnittstellen. Dann ließe sich auch eine RFM basis erstellen oder dezentral arbeiten. Ich würde mich jetzt ersteinmal nur auf die Mechanik stürzen, außerdem bezweifle ich die Statik von Fischertechnik. Wenn die ersten Cubes mit entleerung fertig sind, dann automatisier das ganze. Tm Btw. was für ein System verwendest du denn?
> Habe die Erfahrung, dass bei Projekten v.a. wenn man in die Atmega > geschichte einsteigt und dann vorhat zig Module zu bauen das ganze > verebbt Das kann ich mir gut vorstellen, insbesondere weil am Anfang halt wirklich viel auf einmal kommt. Andererseits fällt mir die Programmierung nicht so schwer wie einem Neueinsteiger, da ich in dem Bereich schon recht viel Erfahrungen sammeln hab können. Ausserdem bin ich's von der Uni gewohnt, mich durch lange, komplizierte technische Publikationen zu quälen :D > Du könntest aber auch zur Koordination des ganzen einen kleinen > Embedded PC verwenden. Mit Linux und serieller Kommunikation zu Atmegas > etc... ( Cron für die Zeittasks!) Kanns zwar nicht wirklich begründen, gefällt mir aber nicht wirklich. Eine wirkliche Koordination ist nicht nötig, da alle Units autonom arbeiten und übers Netzwerk nur gewisse interne Funktionen (Licht an, Pumpe aus, Gewitter im Terrarium, Raumtemperatur ändern etc. etc.) über Befehle zur Verfügung stellen. Ich will halt, dass die Media Control Aquarium und Terrarium dimmt, wenn ich am Beamer zocke oder Filme schauen will. > Und für was willste dann Ethernet einsetzen? eigenes Funknetzwerk > RFM12 > Ethernet > Kabel > WLAN-Router > MacBook Pro Am Macbook lauft eine Monitoring und Setup Software, um die Units zu konfigurieren. > Wenn die ersten Cubes mit entleerung fertig sind, dann automatisier das ganze. hä? oO Vielen Dank, Markus BTW: Gibts Motor-Profilzylinder für Haustüren halbwegs leistbar?
Ich meinte erst kommt die hardware, dann die software. Und viel Spaß beim coding der ganzen Sache. Tm
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.