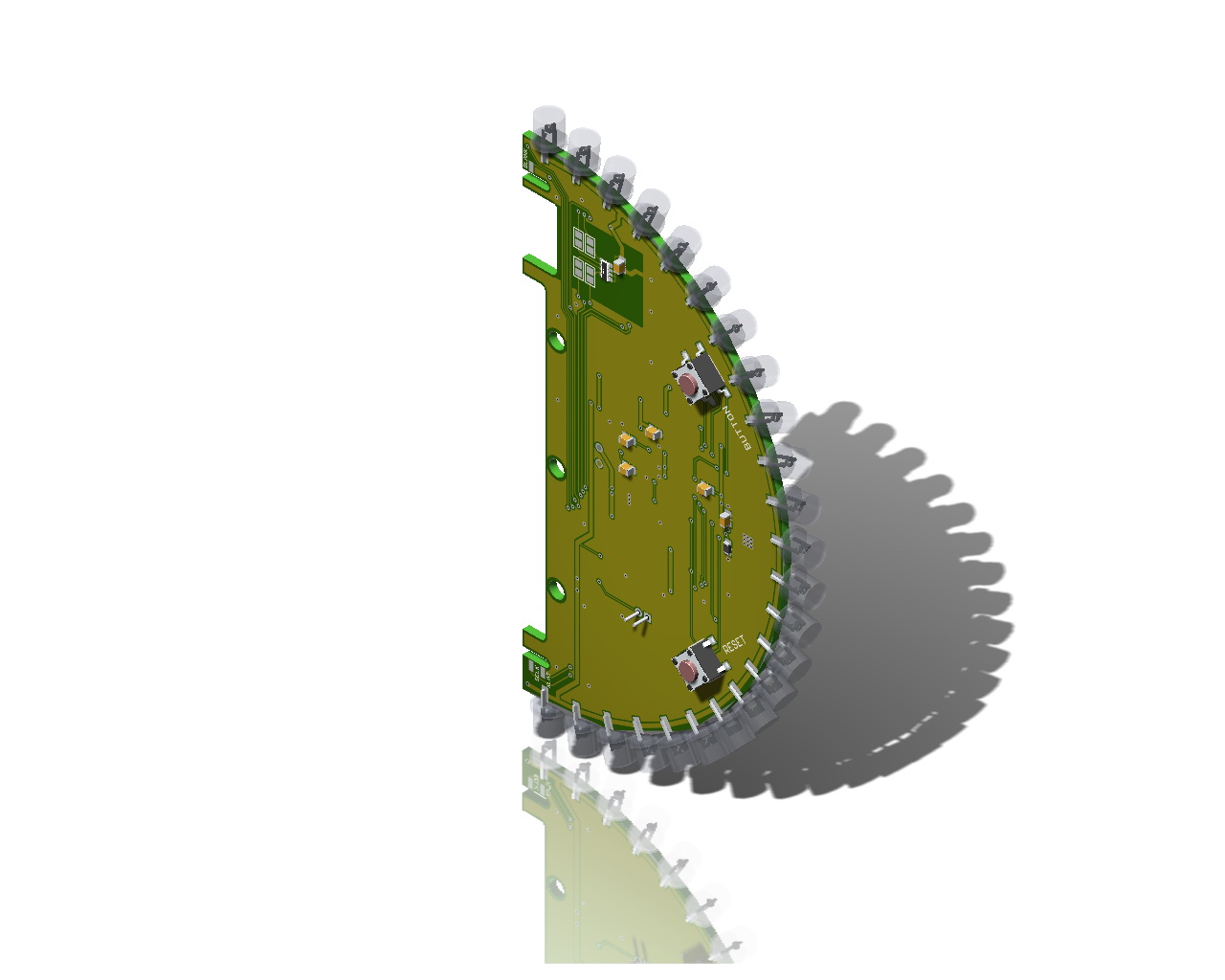
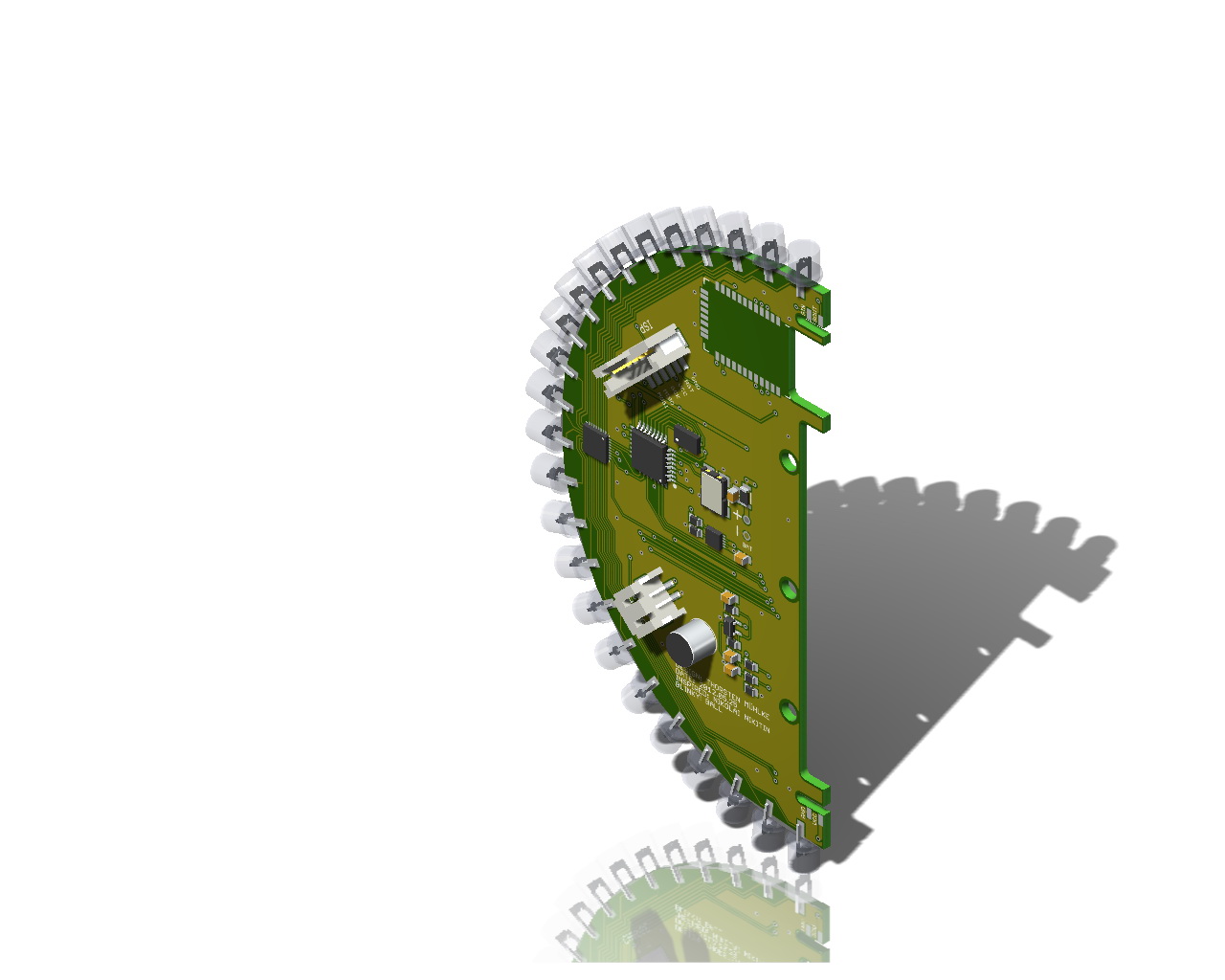
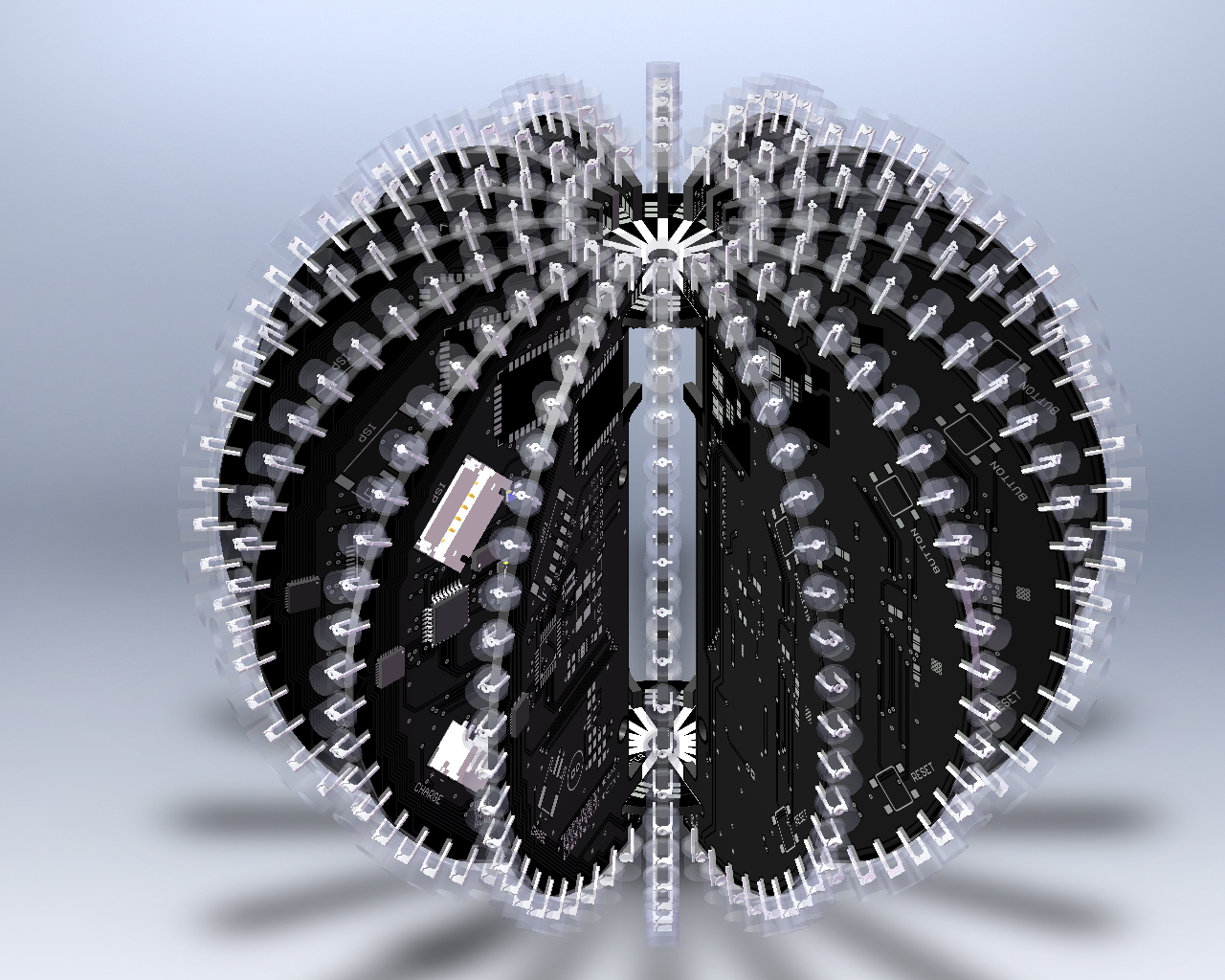
Hallo Gemeinde, ich bin im Inet auf folgende Seite gestoßen: http://charliex2.wordpress.com/2012/02/11/the-blinky-ball-nullspacelabs/ Nach weiterer Suche habe ich die Schaltpläne,... gefunden: Wiki Page: http://wiki.032.la/nsl/NSL_SVN_Server Browsable: http://www.032.la/svn/ bzw. für svn-Software: svn://svn.032.la:6699/032/ Hat schon jemand von Euch Erfahrung mit dem Projekt bzw. den Ball schon mal nachgebaut? Zusammen mit meinem Kumpel Thorsten M. haben wir Schaltplan und Platine der Version V3 überarbeitet, d.h. die ungerouteten Signale elimiert und die Verbindungskabel durch Leiterbahnen auf dem oberen und unteren Verbindungskreisen ersetzt. Schaltplan und ein Bild von einem "segel" (slice) sind angehangen. ZIEL: Jeder, der mag kann sich einen Ball aufbauen (je mehr Leute einen haben wollen und sich an einer Bestellung beteiligen, je billiger wird das ganze!). Was wann wer bestellt muss noch geklärt werden. Die Software ist etwas problematisch, da diese schlecht bis gar nicht dokumentiert ist. Dies trifft sowohl für die PC-Seite als auch für die Controllersoftware im Ball zu. So ist mir z.B. gar nicht klar, was über die Bluetooth-Module zwischen PC und Ball ausgetauscht wird. Es sollte doch möglich sein, Animationen auf den Ball zu spielen oder zu mindestens von PC aus Animationen zum Ball streamen. Daher ist die Bestrebung, die Software zu optimieren. Für die Anfertigung von Softwarespezifikationen sind eure Mithilfe und Anregungen sehr willkommen. Was die Harware anbelangt, so sind natürlich auch noch Anregungen und Verbesserungsvorschläge willkommen. Der Schaltplan ist eng an dem vom Charliex angelehnt, damit zumindest die 14 fest in der Software integrierten Animationen laufen. Mikrofon und Beschleunigungssensor werden wohl in dieser Version nicht unterstützt. Ideen sind willkommen! DER ANFANG: 1) Geplant ist erstmal mindestens einen Satz Platinen für einen Ball zu bestellen und die Software vom SVN-Server (siehe oben) einzuspielen. 2) Weitere Features wie Mikrofonintegration und Benutzung des Beschleunigungssensor sollen folgen. 3) Ich werde schon mal anfangen, die Treiber für den Beschleunigungssensor zu schreiben. 4) Jeder Andere kann natürlich auch kreativ tätig werden. MfG Karsten
Angehängte Dateien:
-

nsl_Blinky_back.jpg
100 KB -

nsl_Blinky_front.jpg
120 KB
Angehängte Dateien:
-

lbb_complete_bottom.jpg
660 KB -

lbb_complete_front.jpg
850 KB -

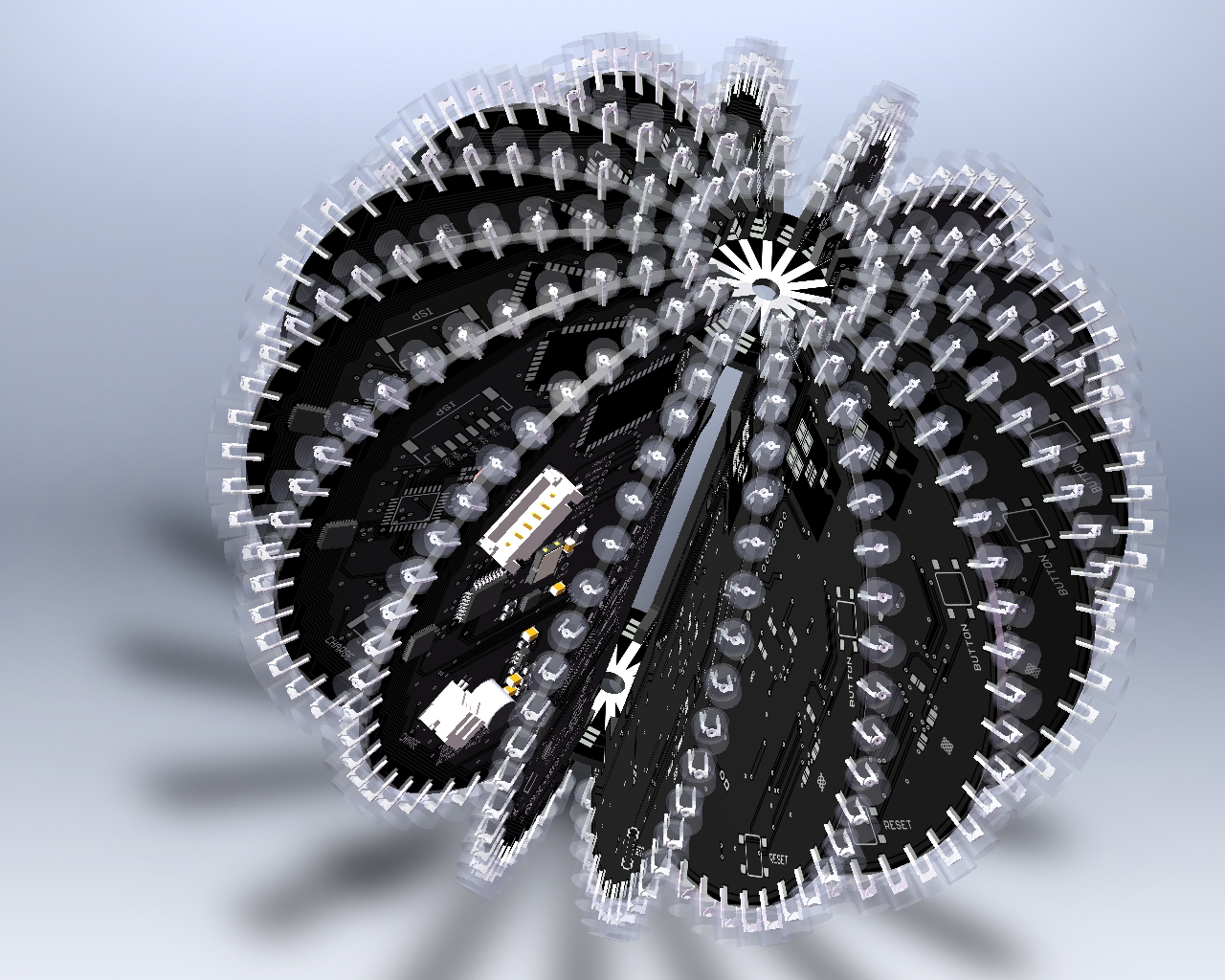
lbb_complete_iso.jpg
910 KB -

lbb_complete_random.jpg
950 KB -

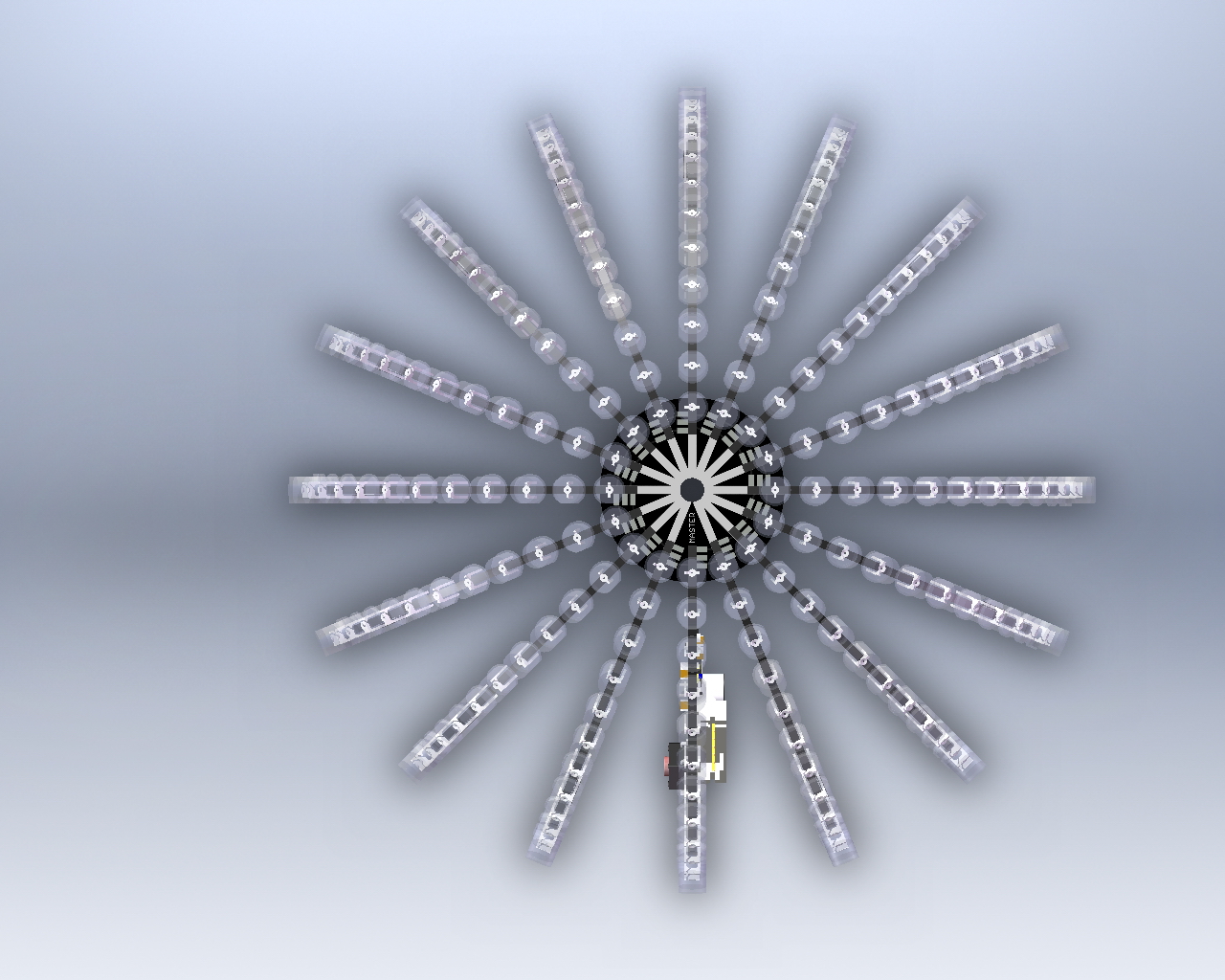
lbb_complete_top.jpg
680 KB
Hallo, hier die Daten der einzelnen Bestandteile. karsten
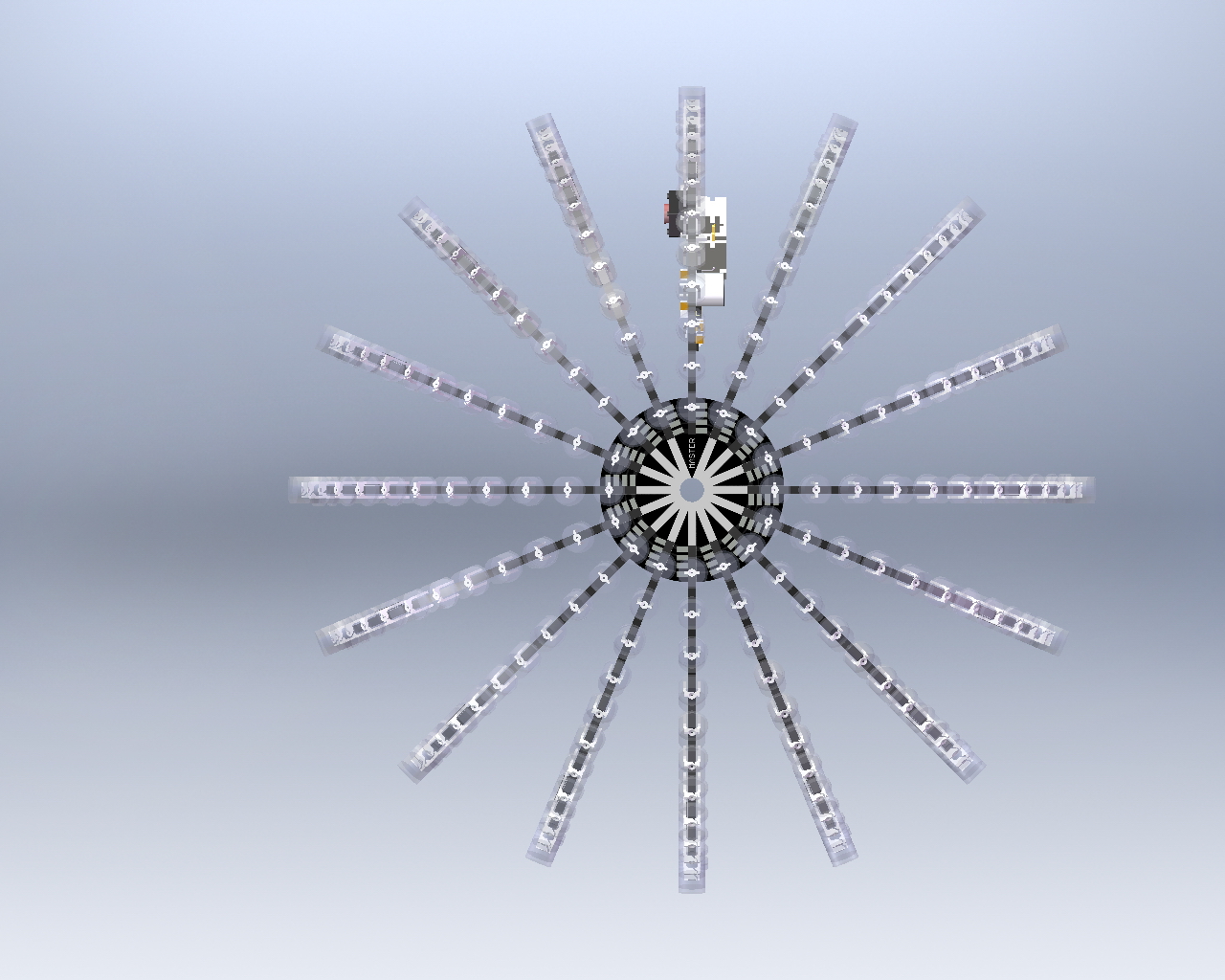
hier noch eine interaktives 3D-Modell der Kugel. Die EXE-Datei ist mit Solidworks erstellt und Virenfrei. Also keine Angst beim öffnen. Karsten
Angehängte Dateien:
-

IMG_1366.JPG
920 KB -

IMG_1367.JPG
760 KB -

IMG_1369.JPG
800 KB -

IMG_1371.JPG
750 KB -

IMG_1373.JPG
780 KB -

IMG_1374.JPG
890 KB -

IMG_1377.JPG
870 KB -

IMG_1388.JPG
1,1 MB -

IMG_1386.JPG
1 MB -

Scheibe_BOTTOM.jpg
230 KB -

Scheibe_TOP.jpg
220 KB



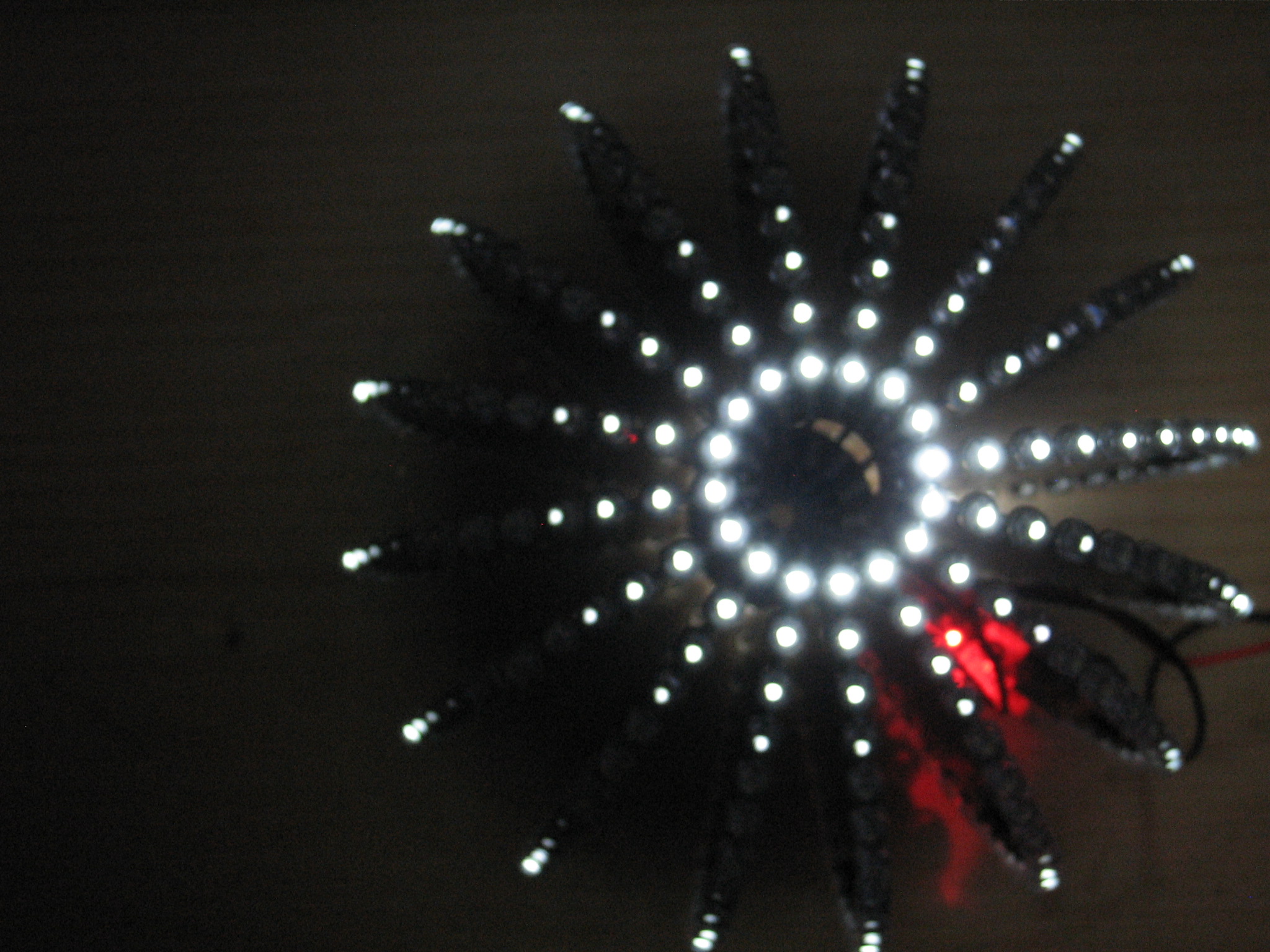



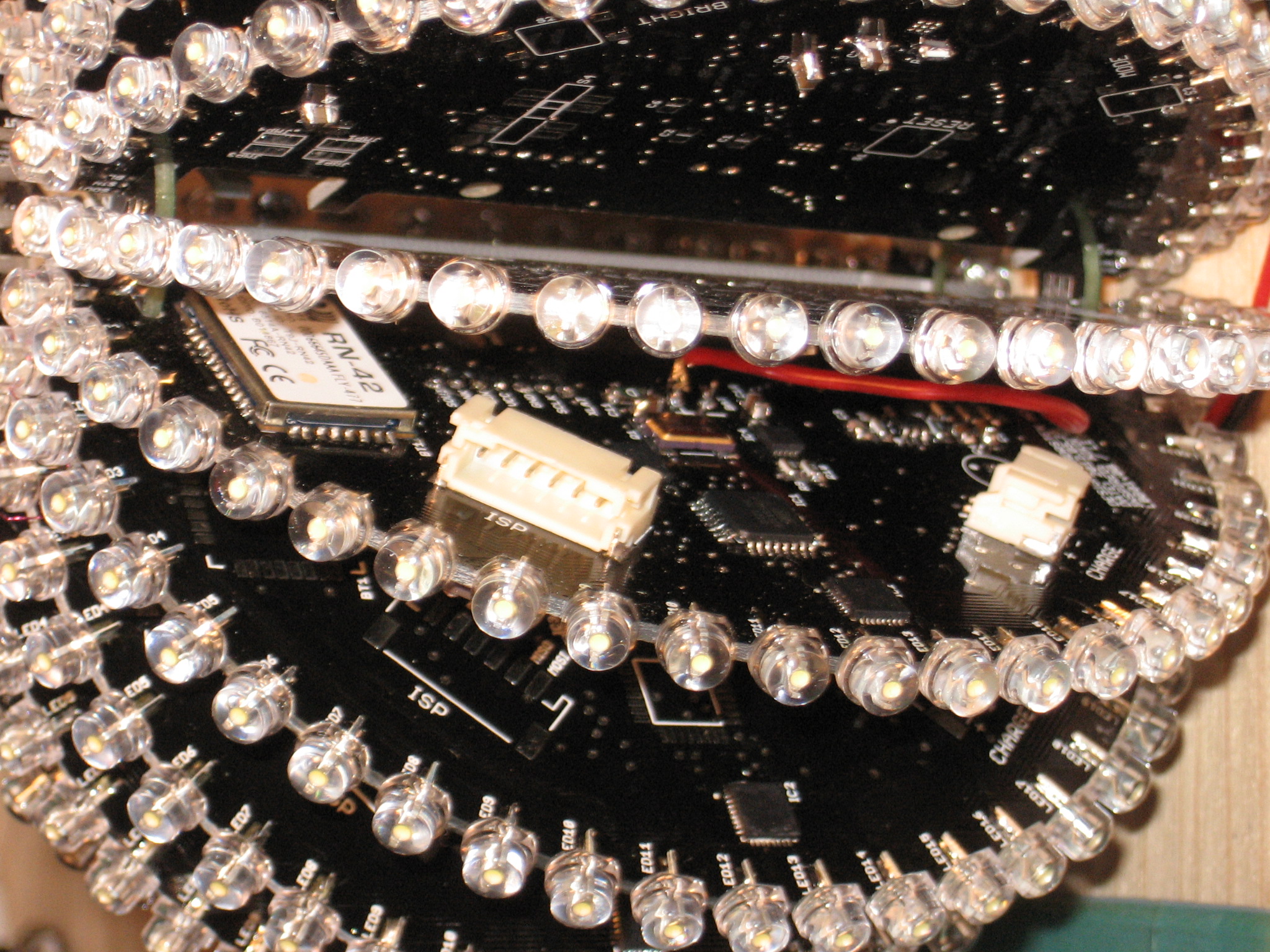
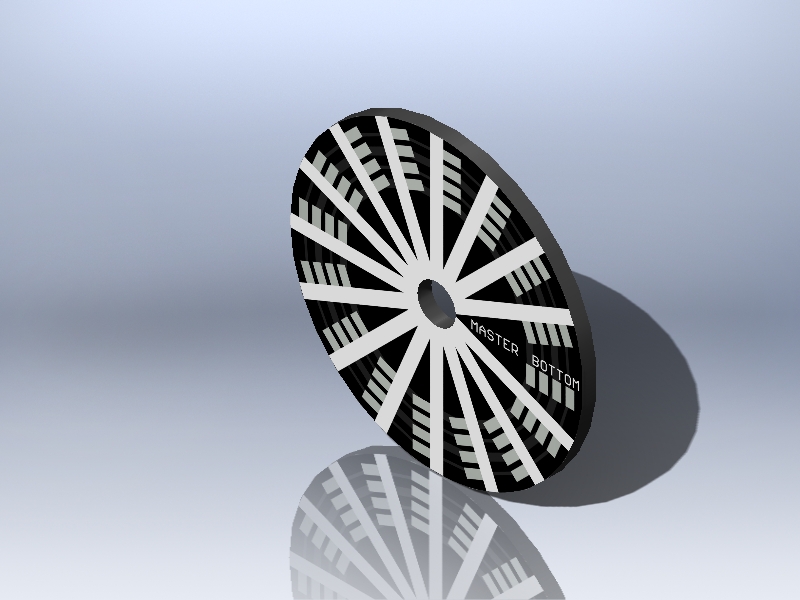
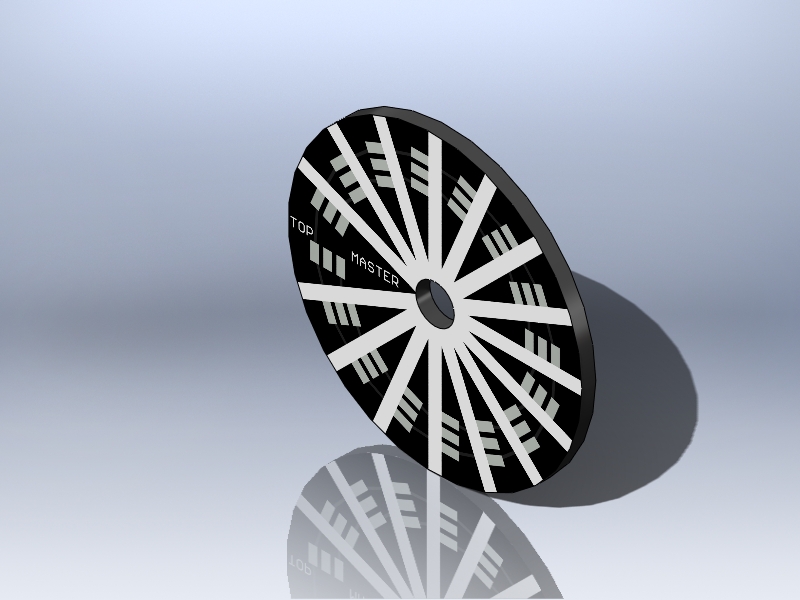
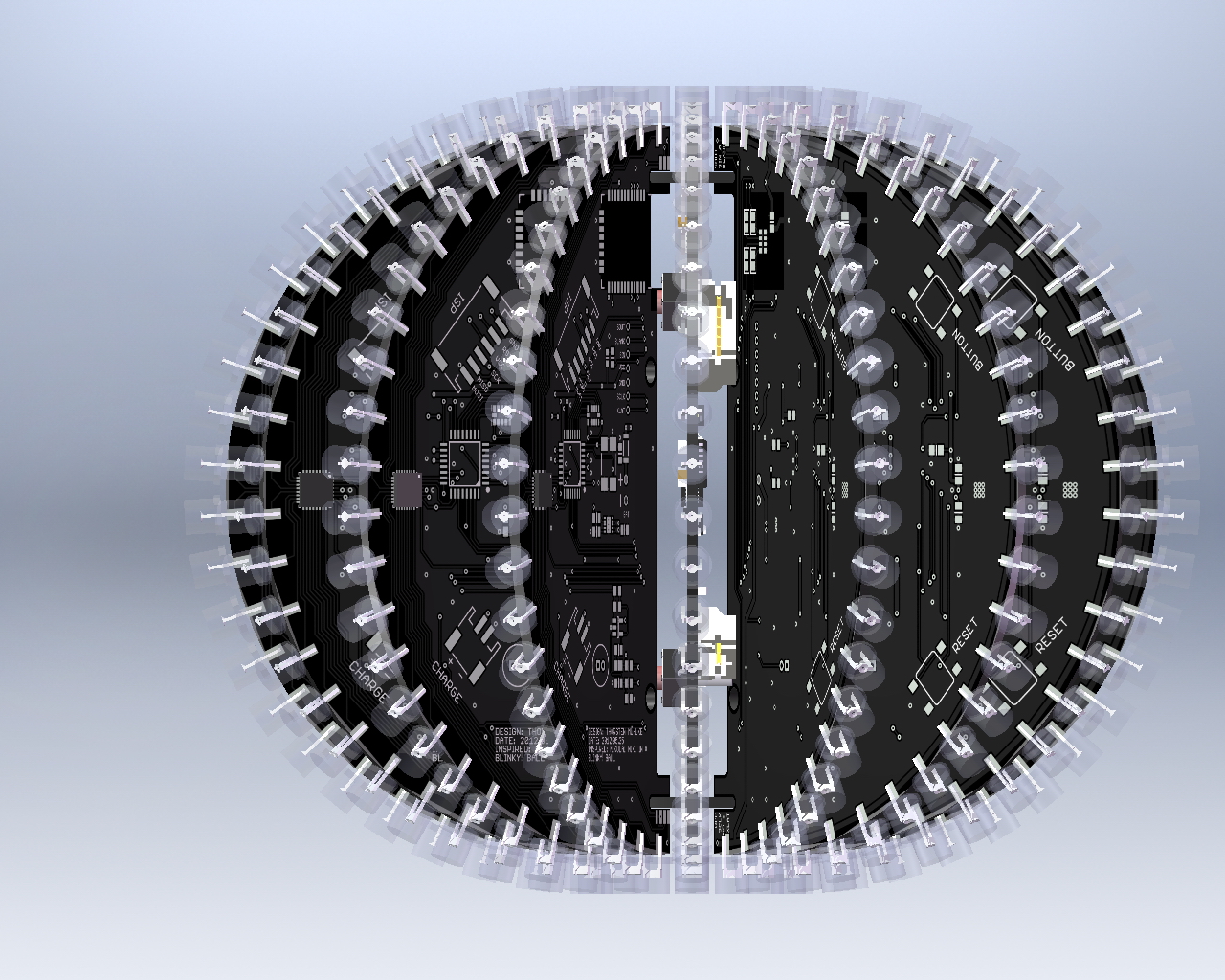
Hallo Gemeinde, die Platinen sind vor einieger Zeit angekommen und endlich habe ich Zeit gefunden, den Ball aufzubauen. Das Resultat findet sich hier: http://youtu.be/yeWpM2qrT-Y In der ersten Version wurde die Kugel mit Flat Top LEDs auch China aufgebaut. Der Schleuderpreis von 25€/1000 (2.5 cent/Stück)hat sich auch als billige Ramschware entpuppt. Nach ca. 1 Woche Betriebszeit waren 2/3 der LEDs ausgefallen. Also alle 384 LEDs runter und neue rauf. Diesmal Straw Hat 4.8mm zu ca. 11 cent/Stück. Die Kugel läuft nun schon 2 Tage ohne Ausfall. Guter Rat: Nicht am falschen Ende sparen und bei den LEDs auf Qualität setzen. Die einzelen Segel sind oben und unten mit einer Scheibe verbunden. Die Scheibe ist vom Layout her so gwählt, dass oben und unten dieselbe Scheibe verwendet werden kann, wodurch die Kosten reduziert werden. Die Steuersignale und Spannungsversorgung für den LED-Treiber sind komplett über die Scheiben geführt. Die Polyfuse begrentzt den Strom auf ca. 550 bis 600mA, wodurch jede LED bei Full on mit ca. 1.4 mA Strom versorgt wird. Daher habe ich noch ein zusätzliches Kabel von Batterie+ an VCC des unteren Ringes gelegt. Damit lassen sich auch höhere Ströme wie hier ca. 8mA pro LED treiben. Wer mag, kann die Polyfuse also durch einen Draht ersetzen. Die 100nF-Kondensatoren sind durch keramische 47uF-Kapazitäten ersetzt, um die Pulsströme beim Einschalten der LEDs auf maximale Helligkeit abzufangen. Den LiFePO4-Akku zur autarken Versorgung verwende ich bei dieser Kugel nicht, da die Kugel über ein externes Netzteil versorgt wird. Sonst befindet sich der Akku in der Mitte der Kugel von den Segeln eingeschlossen. Die untere Verbindungscheibe habe ich bei mir mit einem Stufenbohrer aufgebohrt, damit später bei Bedarf noch ein kleiner LiFePO4-Akku nachgerüstet werden kann. Der Zusammenbau ist nicht weiter problematisch, wenn man mit einem Lötkolben umgehen kann. Lediglich die QFN-Packages erfordern etwas Geschick. Das Mikrofon und der Beschleunigungssensor sind noch nicht softwaremäßig implementiert. Die Software aus der oben angegebenen Quelle habe ich in ein AVR Studio 6 Projekt überführt. Die nächsten Schritte werden die Software für den Beschleunigungssensor und des Mikrofon (z.B. FFT für Spektrumanalyser) sein. Das Bletoothmodul funktiert problemlos. Ein vernüftige Software für den PC steht auch noch auf meiner ToDo-Liste. Soweit der aktuelle Stand des Projektes. Wer Lust und Laune hat, darf sich gerne an hier Beteiligen. Gerne sind Vorschläge und Realisierungen für Funktionen willkommen. Gruß Karsten P.S. Vielen Dank nochmals an Thorsten Mühlke für das (wie immmer) perfekte Platinenlayout.
Angehängte Dateien:
-

IMG_6333.JPG
550 KB
Hallo Gemeinde, melde mich nach längerer Pause in diesem Projekt zurück. Nachdem ich nun endlich Zeit gefunden habe, den Blinky Ball ferti zu stellen, möchte euch dieses Ergebnis nicht vorenthalten. Die Datei LBB01v00 enthält den Schaltplan mit den dokumentierten Änderungen. Die Datei SuperBall1.zip emnthält die Software als AVR-Studio6 Projekt In der originalen Vorlage sind einige (wie ich finde gravierende) Fehler vorhanden: - G-Sensor nicht implementiert - Mikrofonschaltung funktioniert nicht (ich konnte bis heute keine Lauffähige Version herstellen) - Software-SPI---> viel zu langsam für 384 LEDs - kleinere Layoutfehler von Thorsten und mir. - Versorgungsspannung kann nicht gemessen werden. Diese Version hat die Fehler behoben(Siehe Schaltplan): - Hardware-SPI, wo es geht - G-Sensor implementtiert - Mikrofonschatung auf den Platine durch zugekauften Mikrofinverstärker von ELV (siehe Schaltplan) ersetzt. Der Verstärker auf der Platine wird nur verwendet, um das Ausganssignal von +/-1V des Mirkrofonverstärkers auf die halbe Betriebsspannung zu Skalieren. - Die Sicherung F1 ist entfernt, da der Spannungsabfall bei höhen Strömen zu groß wird. - Signalkonditionierung durch Pull-Ups an einigen Stellen. - Versorgungsspannung wird über einen Spannungsteiler gemessen. Als Referenz für den ADC wird die interne Band-Gap des ATMega verwendet. So lassen sich zuverlässig Spannungen bis 2.7V messen. Unterspnnung wird erkannt und es kann entsprechend reagiert werden. Es gibt insgesamt 11 Modi (Animationen): - Spektrumanalyser ( bis ca. 4KHz) mit Goertzel realisiert -> Mikrofonimplementierung - Horizontaler Ring, der sich mit einer Beschleunigung nach oben oder unten verschiebt -> G-Sensor implementierug - Umlaufende Spalte - vertikale Kreise - horizontale kreise - einzelne Helix - einzelne Helix klein - doppelte parallele helix - doppelte helix gegensinnig - Alles voll an - Auto Mode, alle animationen werde nacheinander angezeigt in einer endlosschleife. Die Aktivierung des Auto-Mode wir mit einem zweimaligen Blinken der Kugel angezeigt. Die Taster "Mode" und "Bright": *Kuzer Druck der "Mode" Taste*: Eine Animation vor. Bei Erreichen der letzen wird von vorne begonnen *kurzer Druck "Bright" Taste:* Die Helligkeit wird global stufenweise bis zum Maximalwert erhöht und beginnt bei Überschreiten des Maximalwertes mit minimalen Wert von vorne. *Langer Druck Der "Mode"-Taste (2-3s):* Die Kugel Blink einmal und schaltet in den Setup-Modus für die Animationsgeschwindigkeit der aktuellen Animation. Mit "Mode" wird die Geschwindigkeit reduziert, mit "Bright" erhöht. Die Änderung der Geschwindigkeit ist sichtbar. Nochmaliges langes Drücken der "Mode"-Taste verlässt den Setup-Modus für die Geschwindigkeit, erkennbar am zweimaligen Blinken der Kugel. Dieser Modus hat eine Besonderheit: Wird dieser Modus währen des Auto-Modes aufgerufen, wird mit der Animationsgeschwindigkeit die Zeit eingestellt, die jede einezelne Animation läuft, bevor zur nächsten weitergeschaltet wird. *Langer Druck Der "Bright"-Taste (2-3s):* Die Kugel Blink einmal und schaltet in den Setup-Modus für die Helligkeit der aktuellen Animation. Mit "Mode" wird die Helligkeit erhöht, mit "Bright" erniefrigt. Die Änderung der Helligkeit ist sichtbar. Nochmaliges langes Drücken der "Bright"-Taste verlässt den Setup-Modus für die Helligkeit, erkennbar am zweimaligen Blinken der Kugel. Für jede Animation lässt sich die Helligkeit und Geschwindigkeit individuell einstellen. Alle Einstellungen für Helligkeit und Geschwindigkeit, sowie der aktuelle Animationsmodus werden im EEPROM gespeichert. Bei jedem Reset oder Einschalten der Kugel werden die Werte aus dem EEPROM ausgelesen. Factory-Default-Werte gibt es in dieser Softwareversion noch nicht. Nach dem ersten Programmieren werden die Werte aus dem EEPROM gelesen, die aber zufällige Werte haben können. Für jede Animation müssen/können Helligkeit und Geschwindigkeit manuell von Hand eingestellt werden. Alternativ kann auch die for-next-schleife nach den Variablendeklarationen entkommentiert werden. Alles kompilieren und brennen. Nun werden sinnvolle Defaultwerte ins EEPROM geschrieben. Danach die For-Next-Schleife wieder kommentieren und erneut kompilieren. Das Kompilat brennen und fertig. Nach dem Einschalten haben alle Animationen diesselbe Helligkeit und Geschwindigkeit. Das war's in Kürze vom Projekt Blinky Ball. Für Anregungen bin ich wie immer dankbar. Viele Grüße Karsten
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.