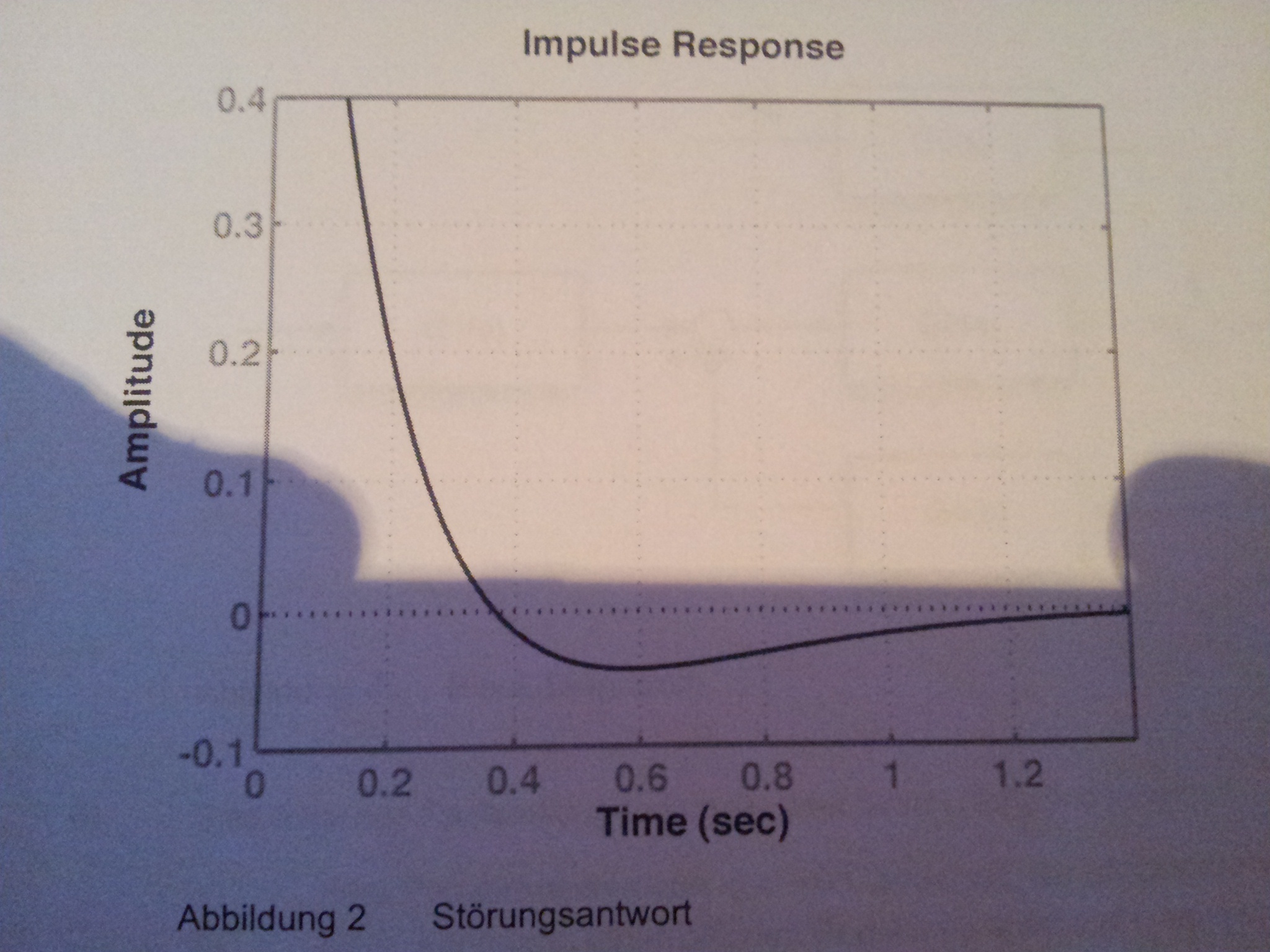
Guten Tag, ich habe morgen eine mündiche Prüfung und habe leider ein paar sachen nicht ganz verstanden, vielleicht könntet ihr mir ja helfen. Hier die Fragen: 1. Legen Sie die Drehzahlregelung eines Gleichstrommotors aus. a. Warum wird typischerweise ein PI-Regler für die Drehzahlregelung eingesetzt? eventuelle antwort: Treten eventuell Regelabweichung auf, bewirkt der P-Anteil eine sofortige Änderung des Solldrehmoments und damit unverzögerte Änderung des Drehzahlreglers. Somit steht der P-Anteil für die Dynamik der Drehzahlregelung. Der I-ANteil dient der Kompensation von stationären Störgrößen. b. Kann der Parameter Kp des PI-Reglers die Stabilität des geschlossenen Regelkreises verschlechtern? der Parameter TN? oder beide? 2. Die Regelabweichung eines Regelkreises für Störverhalten ist aufgetragen( Abbildung anhang). Bestimmen Sie die charakteristischen Merkmale dieser Systemantwort (geforderter Bereich der Regelabweichung +- 2%). Vielen Dank schon mal, ist sehr wichtig für mich Mfg festin
Angehängte Dateien:
-

20120705_202242.jpg
660 KB
Der Begriff Dynamik ist mir nicht klar, aber ansonsten würde ich Deiner Antwort a zustimmen. Als nicht-akademiker hätte ich es laienhaft so formuliert: Der P-Anteil sorgt für schnelle sprunghafte ungenaue Antworten auf Abweichungen von der Soll-Drehzahl, während der I-Anteil durch fortlaufende Korrektur die Drehzahl allmählich an den Soll-Wert anpasst. Richtig getunt führt die Kombination der beiden Regler zu einer schnellen Drehzahl-Korrektur mit wenig Überschwingung. P alleine würde Abweichungen entweder unzureichend oder über kompensieren. I alleine würde langsamer regeln, als die Kombination beider. Ein reiner I Regler kann also je nach Anwendungsfall auch geeignet sein, ein reiner P Regler aber eher nicht, da eine exakte Berechnung des Korrekturwertes nur anhand einer einzelnen Abweichungs-Messung praktisch annähernd unmöglich ist. Ein zu hoher Kp Faktor kann zu anhaltender Schwingung führen. Ist der Kp Wert niedriger, als optimal, wird die Drehzahl bei Abweichung langsamer korrigiert, als technisch möglich (was durchaus gewollt sein kann, um z.B Kräfte oder Stromaufnahme zu begrenzen). Ein zu hoher Tn Faktor führ ebenfalls zu Schwingungen wegen Über-Kompensation, während ein niedriger Tn Faktor die Regelung verlangsamt. Durch Kombination beider Regler kann der Kp Faktor beide meist höher gesetzt werden, als ohne I Regler, da der I Regler Schwinungen des P Regler gegen-kompensiert. Frage 2 verstehe ich nicht, ist über meinem Horizont. PS: Ich glaube, das sind ganz elementare Fragen der Regelungstechnik, die Du bei deiner Ausbildung eigentlich im Schlaf können solltest.
Bei 2. wird es wohl um Anstiegszeit und Überschwingen gehen, was man aus der Skizze ablesen soll.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.