Hi zusammen
Ich baue anlässlich meiner Abschlussarbeit einen Roboter.
Leider funktionniert nicht alles ganz genau so wie es sollte.
Mein Hauptproblem ist die Lichtschranke, die eigentlich ganz passabel
funktionieren würde, jedoch irgendwie herumspinnt, wobei es eher am
Mikrocontroller liegt.
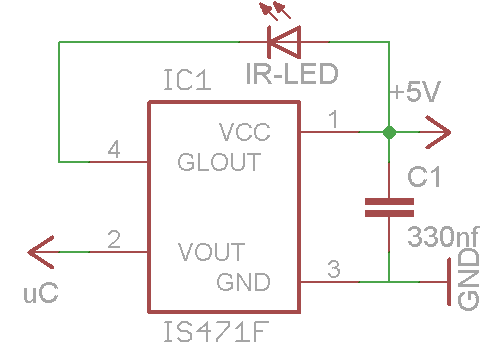
Ich habe den schematischen Schaltplan als Bild beigefügt.
Dieser IC schaltet, wenn die Lichtschranke unterbrochen wird, die
Spannung zum Mikrocontroller. Das Funktioniert und der Mikrocontroller
erkennt dies auch. Eenn jedoch die Lichtschranke erneut abgefragt wird,
erkennt er immer dass die Lichtschranke geschlossen ist.
Was ich gemacht habe:
1) Pulldown angeschlossen
2) Gemessen, es ist immer 0 V auch wenn laut Mikrocontroller die
Schrnake zu ist.
Der für die Lichtschranke zuständige Teil im Programm ist dieser:
1 | Config Pinb.0 = Input
|
2 | Lichtschranke Alias Pinb.0
|
3 | ...
|
4 | ...
|
5 | While Pinb.0 = 0 'Greifer so lange nach vorne bewegen bis Lichtschranke geschlossen
|
6 | Call Pwmrechner(distance , 1)
|
7 | Waitms 50
|
8 | Distance = Distance + 0.25
|
9 | Wend
|