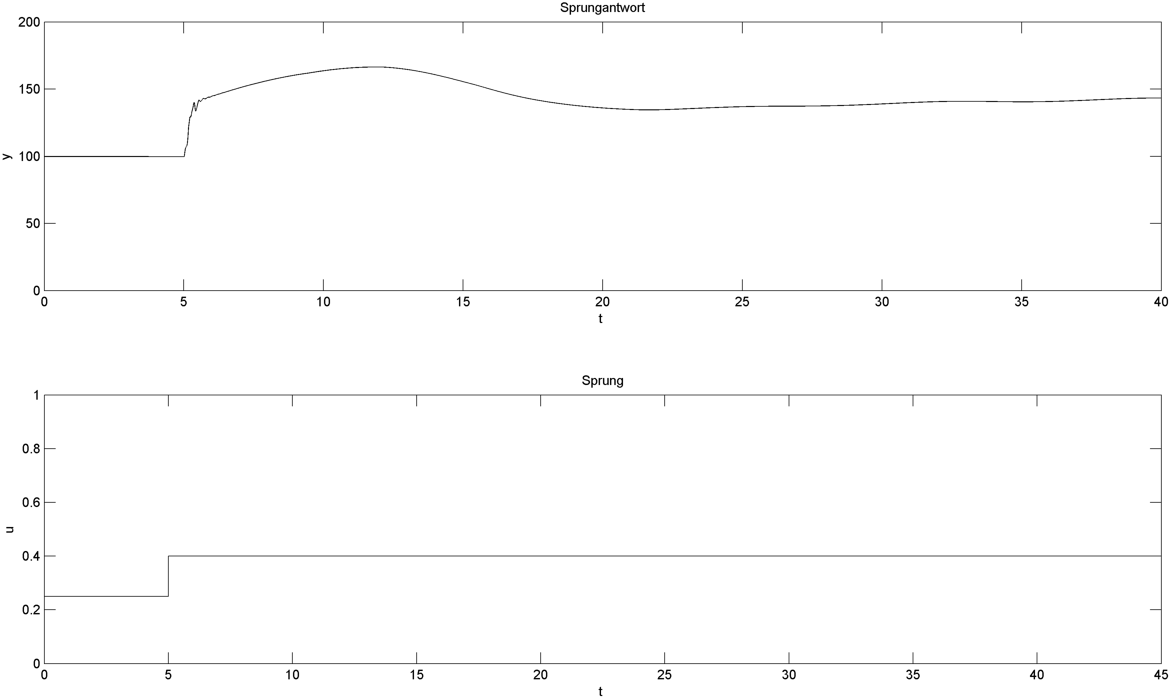
Hi, ich habe folgende Sprungantwort einer Regelstrecke, welche zu identifizieren ist: Ich vermute, dass es sich um ein PTn-Element handelt, konnte jedoch in diversen Regelungstechnik Büchern keine skizzierte Sprungantwort einer höheren Strecke als PT2 finden. Habt Ihr eine Idee um welche Strecke es sich handelt bzw. wie man diese annähert? greets Matthaeus
Angehängte Dateien:
-

Forum.png
13 KB
Bist du sicher das dies die Sprungantwort der Regelstrecke ist? Bei einem geschlossenen PI-Regler mit einer PT2-Regelstrecke ergibt sich genau so ein Funktionsverlauf der Stellgröße als Reaktion auf einen Sprung, wenn der Regler leicht überschwingt. Was mich an dem Bild stört, ist die sehr steile Rampe, gefolgt von einer eher langen gedämpften Schwingung. Im ersten Ansatz hätte ich gesagt, dein System ist P+PT2 oder PT1+PT2 mit T1<<T2 da kein Sprung vorhanden ist. Das P oder PT1 kann man gut erklären, da es ein nahezu sprunghafter Anstieg von 100 auf 140 ist (P=40). Allerdings passt dann das PT2 nicht, da der stationäre Endwert nach der gedämpften Schwingung wieder 140 ist, wodurch sich eine Verstärkung von 0 ergibt. Hast du die Möglichkeit mit Matlab/Octave die Sprungantworten zu berechnen? Mann müsste ja einige Parameter durchprobieren.
Danke erstmal für den input! Es ist folgendermaßen: die abgebildete Strecke ist Teil eines größeren Simulinkmodells, in welchem ich zwei Größen regeln möchte. Das Modell hat, unter anderem, Kennfelder implementiert, weshalb ich beschlossen habe die Strecken per Sprungantwort zu bestimmen. Aus diesem Versuch der Identifikation per Sprungantwort stammt dieses Diagramm. Das Diagramm zeigt nur die Strecke, ohne einen implementierten Regler. Ich habe Matlab und werde versuchen die Strecke mit deiner genannten Kombination anzunähern.
Wenn das Kennlinienfeld nicht linear ist, so ist das ganze System nichtlinear. Funktioniert die Kennwertermittlung via Sprungantwort überhaupt noch?
Ja, das System ist nichtlinear. Ich bin in der Zwischenzeit soweit, dass ich meinen Fehler erkannt habe. Für die Regelung des nichtlinearen Systems ist eine Zustandsregelung nötig. Die habe jedoch am Anfang ausgeschlossen, da das linearisierte System zu stark vom eigentlichen nichtlinearen System abweicht.
Angehängte Dateien:
-

sprung.jpg
39 KB
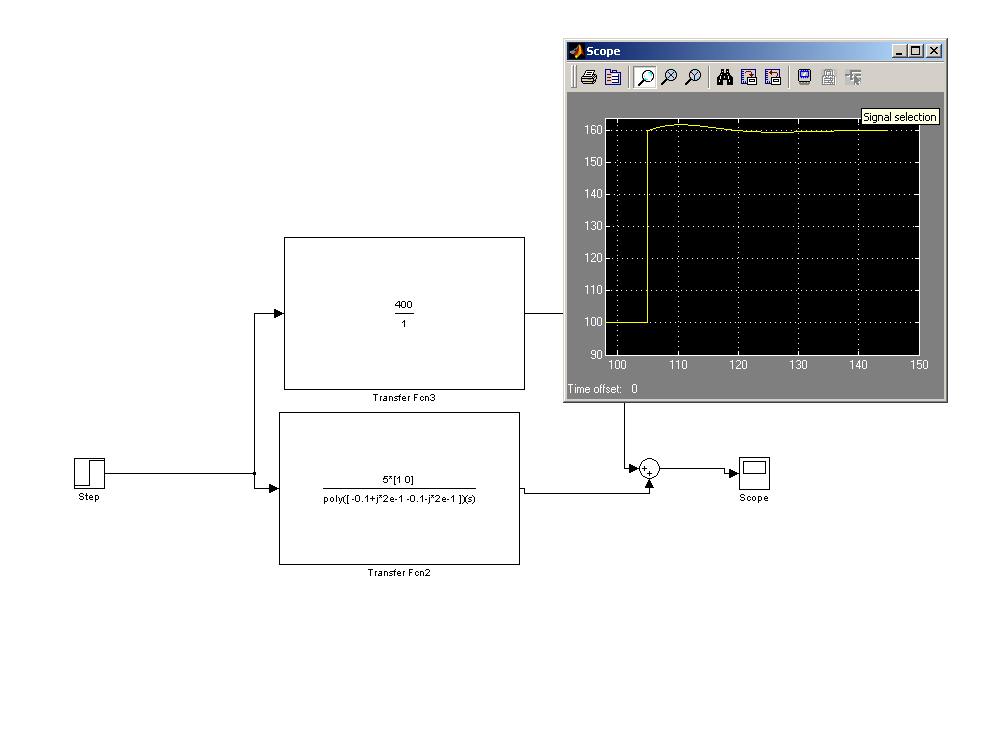
Das Ding läßt sich doch prima mit einem linearen System modellieren: Es ist sprungfähig, Verstärkung ca. 400 (0.25 rein -> 100 raus) und überlagert einen gut gedämpften Schwinger mit Periodendauer von ca. 20sec. . Also: G(s)= 400+ 5*s/(s^2+0.2s+0.05) Das s muss in den Zähler weil der Schwinger ja die Impulsantwort sein soll, deswegen dieser Differenzierer. Die 5 ist anhand der Amplitude geschätzt. Das passt gut, ich glaube das System läßt sich so gut simulieren, selbst wenn es ursprünglich nichtlinear war. Angehängt nen Simulink plot. Cheers Detlef
Sieht gut aus! Was gibt es denn für Systeme in der Realität mit Durchgriff? Es ist vllt anzumerken, dass Detlefs System nur für die obige Sprunghöhe gilt.
Vielen dank für die Hilfe! Ich habe den Sprung mit einem PT1 Element anstatt des P-Elements realisiert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.