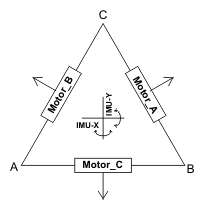
Hallo, Gegeben ist eine Dreieckplattform, auf der ein Beschleunigungssensor montiert ist. Die Plattform soll sich auf einem Hügel immer auf der Spitze des Hügels bewegen. Wenn also beispielsweise Punkt A "absäuft", dann soll mit Motor-A die Plattform wieder auf die Spitze bewegt werden. Kurzum, es soll zyklisch geprüft werden, welche Ecke des Dreiecks am tiefsten liegt und dann dessen gegenüberliegender Motor angesteuert werden. Dieser läuft dann so lange, bis eine andere Ecke des Dreiecks tiefer liegt. Mein Problem ist nun, wie ich die vom Sensor kommenden X/Y-Achsen Messwerte auf die Achsen des Dreiecks umrechnen kann. Wenn mir da einer den Trichter reichen könnte, wäre mir viel geholfen. Vielen Dank, Jost
Angehängte Dateien:
-

Dreieck.png
3,7 KB
Würde ich so machen, dass ich mir mit den beiden Winkeln eine Ebene definiere. Moment: > Gegeben ist eine Dreieckplattform, auf der ein > Beschleunigungssensor montiert ist. Welche Daten kriegst du vom Beschleunigungssensor? Da kriegst du doch sicher die Richtung des Vektors 'nach unten' raus. Oder nicht? In dem Fall ist die ganze Umrechnerei in Pitch und Yaw Winkel schon viel zu aufwändig. Der Vektor ist der Normalvektor der Ebene, einen Punkt der Ebene kennst du. Damit hast du eine vollständige Ebenengleichung. Die Punkt A, B, C fasse ich als senkrechte Geraden auf und berechne, in welcher Höhe diese Geraden durch die Ebene schneiden. Der am tiefsten liegende ... na den Rest kennst du ja.
:
Wiederhergestellt durch User
Hallo Karl Heinz, ich habe mich in die Vektormathematik eingelesen und auch im Kern verstanden wie ich zum Ziel kommen kann. Allerdings muss ich noch ergänzen, daß ich eine 6-DOF IMU (MPU-6050) einsetze. Im Web fand ich ein Beispiel, wie man mittels Kalmanfilter die durch Vibrationen versauten Acc-Daten recht sauber kriegt (https://github.com/TKJElectronics/KalmanFilter). Allerdings stehen danach nur die Roll/Pitch Werte zur Verfügung. Deswegen bin ich auch zunächst von diesen beiden Größen ausgegangen. Mir fehlt eine Idee, wie die Acc-Werte beim Hoppeln über Kieselsteine ohne den - zugegeben heftigen Rechenaufwand- vernünftig gefiltert/kompensiert werden könnten. Mittelwertbildung hab ich schon probiert- ist nicht befriedigend gewesen. Gruß, Jost
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.