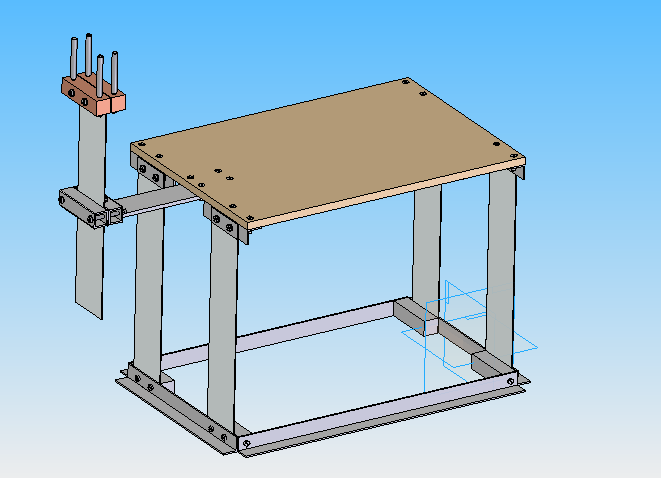
Hallo lieber User! Ich geistere nun schon seit einiger Zeit durchs Netz auf der Suche nach einer passenden (praktischen) Lösung für mein Konzept einer aktiven Schwingungstilgung. Der Schwingtisch, mit dem ich mich derzeit beschäftige, ist auf dem angehängten Bild zu sehen. Eine Kunststoffplatte ist auf 4 Blattfedern aus Federstahl angebracht. Durch die Geometrie der Blattfedern hat der Tisch nur einen Schwingfreiheitsgrad (nennen wir ihn mal x). Seitlich am Schwingtisch ist eine in der Länge verstellbare Blattfeder selber Dicke mit einer Tilgermasse angebracht. Diese Tilgermasse soll zunächst als passiver Tilger dienen. Man stelle sich nun folgendes Szenario vor: Auf der Unterseite der Platte wird ein DC-Motor mit einer kleinen Exzenterstange angebracht. Dadurch entsteht eine (sinusförmige) (Flieh-)Kraft in x-Richtung. Lässt man den Motor mit Exzenter nun genau in der Eigenkreisfrequenz des Schwingtisches drehen, so kommt es zum Rsonanzfall am Tisch und der Tisch hat seine maximale Schwingamplitude (in x-Richtung). WOW, wie beindruckend!!! :-D Stellt man jetzt die Länge der Blattfeder am passiven Tilger so ein, dass passiver Tilger und Schwingtisch die selbe Eigenkreisfrequenz haben, dann verschwinden die Schwingungen am Schwingtisch und es schwingt nur noch der passive Tilger. Teil 2 der Idee ist es nun, auf der Oberseite einen weiteren Motor anzubringen, auf dem ebenfalls eine Exzenterstange montiert ist. Die aktive Schwingungstilgung stelle ich mir nun folgendermaßen vor: Mittels eines Beschleunigungssensors wird die Beschleunigung auf der Platte am Schwingtisch gemessen. Das Ausgangssignal des (in diesem Fall analog arbeitenden) Beschleunigungssensor ist eine sinusförmige Spannung. Diese Spannung könnte ich nun über einen OP-Inverter um 180° in der Phase verschieben (und eventuell in der Amplitude verstärken). Mein Problem: Ich kann dieses Spannungssignal ja so leider nicht auf den Motor leiten, der aktiv die Schwingung tilgen soll, da ich dort ebenfalls einen DC-Motor (einen baugleichen) im Sinn hatte. Eine Wechselspannung auf den Motor zu schalten würde nicht nur NICHT zum Ziel führen, der Motor wäre sicherlich auch nach kurzer Zeit defekt. Rein theoretisch könnte ich ja das sinusförmige Spannungsausgangssignal des Beschleunigungssensor über einen Zweiweg-Gleichrichter so verändern, dass der Sinus nur positive Bäuche hat. Damit geht aber meiner Meinung nach die Phasenverschiebung von 180° verloren (warum kann ich euch bei Interesse erklären). Ausserdem muss das gleichgerichtete Spannungssignal ja auch noch gemittelt werden, da der DC-Motor für die aktive Tilgung ja sonst die Drehzahl hoch-, dann wieder runter-, dann wieder hoch, dann wieder runterfährt usw. Hätte jmd vllt eine Idee wie ich die 180° Phasenverschiebung trotzdem beibehalten kann? Ich hatte alternativ überlegt, für die aktive Tilgung auf der Oberseite einen Induktionsmotor zu nehmen. Allerdings sind die Teile doch recht schwer und relativ groß für meinen kleinen Aufbau. Ein Drehstrommotor käme theoretisch auch in Frage, aber die kosten meist ab 60€ aufwärst und sind auch nicht wirklich kompakt. Ich freue mich auf eure Antworten und natürlich auch über etwas Hilfe. Beste Grüße cyrezzza PS: Ich habe mein Anliegen in keinem anderen Forum bisher gepostet
Angehängte Dateien:
-

Schwingtisch.png
15 KB
Das Problem wirst du nur lösen können, wenn du zumindest den 2. Motor aktiv regelst. Aber wenn dir schon 60 EUR für einen Motor zu viel sind, wirst du vermutlich auch keine 200 oder 300 EUR für einen Motorregler plus Encoder ausgeben wollen?! Mit freundlichen Grüßen Thorsten Ostermann
Hey Thorsten! Danke für die Antwort. Nun, du musst überlegen, dass noch Kosten für das Material und die Werkstatt anfallen. Von daher versuche ich schon auf die Kosten zu schauen und das ganze so einfach wie möglich zu halten. Trotzdem wäre ich erfreut wenn du mir deine Idee vllt etwas näher beschreiben würdest. Ich habe grade einen BLDC Motor für ca. 10€ entdeckt. So ein Motor ist ja im Prinzip auch ein Drehstrommotor und würde sich meiner Meining nach für die Anwendung eignen. Die Idee: Ich verschiebe das sinusförmige Ausgangssignal des Beschleunigungssensors um 180° und leite es auf die erste Phase des Motors. Anschliessend benötige ich noch 2 weitere Phasen mit je 120° Phasenverschiebung. Dann dürfte der BLDC Motor (1 Polpaar vorausgesetzt) genau gegenphasig zum DC Motor laufen. Weisst du wie ich die 120° Phasenverschiebung hinbekomme? Ich weiß das ich mit einem Integrier 90° erreiche. Aber wie ich dann auf die restlichen 30° hinbekomme weiß ich leider nicht. Gruss cyrezzza
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.