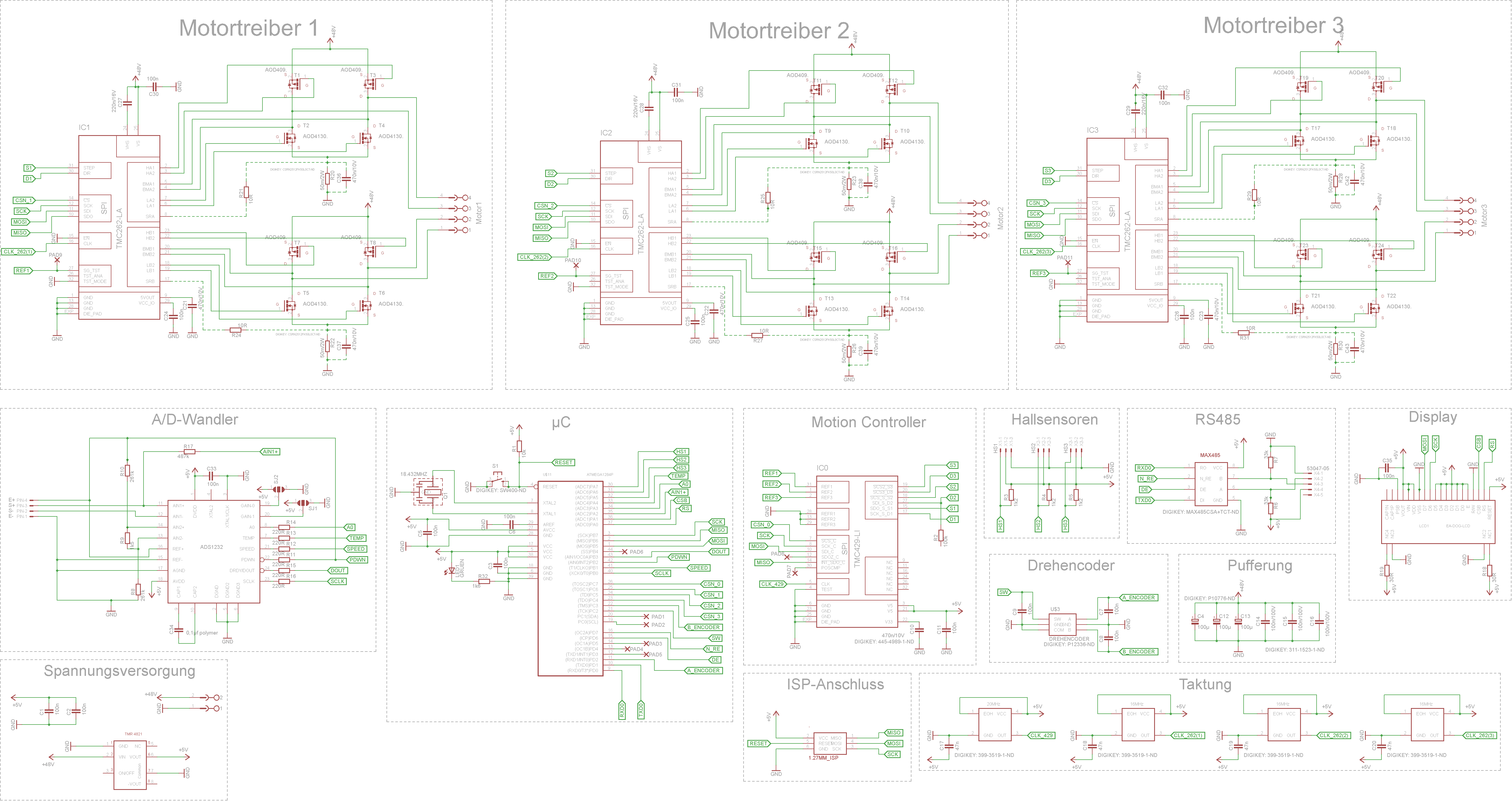
Hallo, ich habe vor eine Schrittmotorsteuerung für drei Motoren mit den TRINAMIC ICs TMC429 und TMC262 zu erstellen. Folgendes wird verwendet: Schrittmotoren: HS60-2150-03 Schaltnetzteil: 48V/6,7A Bevor ich das Layout anfange, hätte ich noch ein paar Fragen: 1. Sind die Vollbrücken im Schaltplan richtig verschaltet? 2. Wie soll ich die Sense-Widerstände dimensionieren? Im Datenblatt des TMC262 steht dazu unter 8. auf Seite 31 eine Formel für den Effektivstrom, nur weiß ich nicht was ich für den Effektivstrom einsetzen muss für meine Motoren. Als Nennstrom ist 5A pro Phase angegeben. 3.Unter 8.1 auf Seite 32 im Datenblatt des TMC262 sind "protection resistors" im Bild eingezeichnet. Wie viel Leistung müssen diese verkraften können? 4. Auf Seite 13 im Datenblatt des TMC429 ist in Figure 5.2 die Verschaltung eingezeichnet. Ist beim Pin SDOZ_C, der zu MISO führt ein Fehler unterlaufen und müsste dort nicht nINT_SDO_C stattdessen stehen? Denn wenn man sich die Pinbelegung auf Seite 12 ansieht, dann steht bei nINT_SDO_C: "Serial data output..." Wozu braucht man dann eigentlich den Pin SDOZ_C? 5. Im gleichen Bild wie bei 4. ist noch ein pull-up/-down Widerstand am Pin SDI_S_D2 eingezeichnet. Benötige ich den überhaupt, wenn ich den Step/Dir-mode verwende? 6. Ist die Pufferung für die 48V ausreichend? 7. Habe ich noch irgendetwas wichtiges vergessen bzw. nicht beachtet?
Angehängte Dateien:
-

Steuerung.png
160 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.