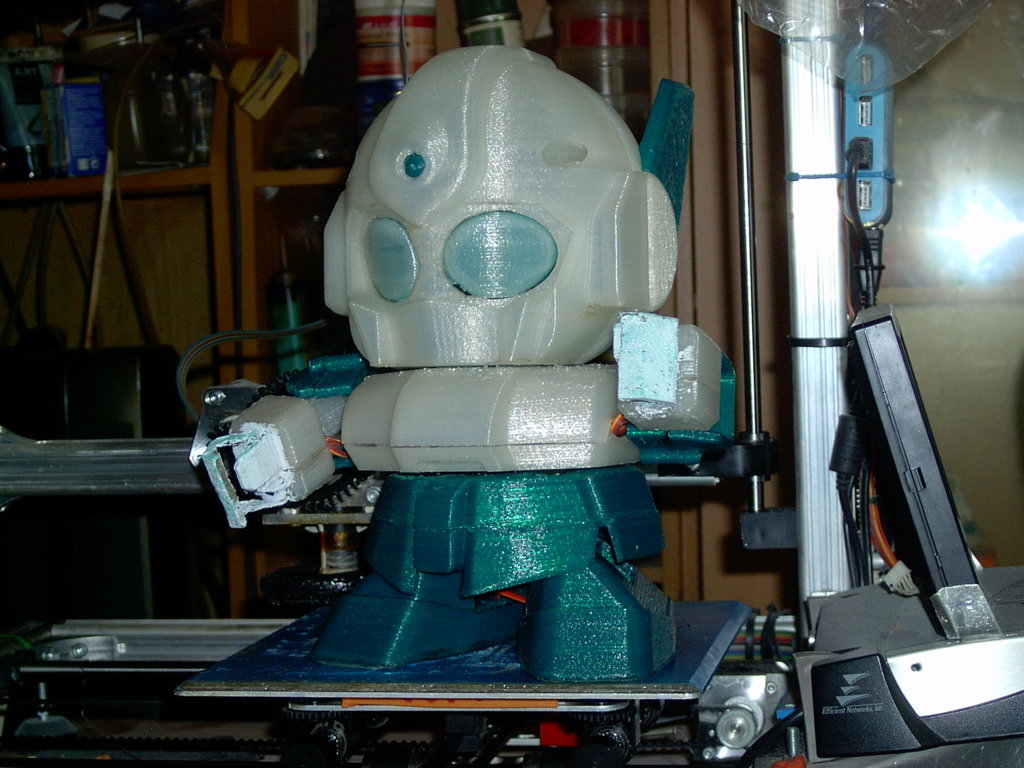
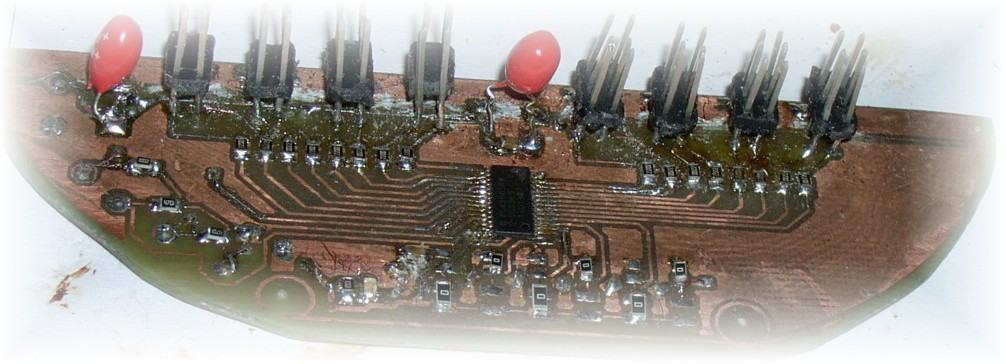
-- zur Freude nichtnur meiner Enkel, habe ich mit meinem 3D-K8200 (und um die Rangeleien mit dem Zoll zu vermeiden!) den RASPIRO nach: http://www.thingiverse.com/thing:309466/#files und http://www.rapiro.com/ nachgebaut; allerdings verwende ich, anders als das Orginal, keinen Arduino als Servo-Treiber, sondern den PCA9685 (bestellt in der Bucht aus GB, geliefert aus Gibraltar); - dazu ist dieser Link hilfreich: https://learn.adafruit.com/16-channel-pwm-servo-driver
Angehängte Dateien:
-

RAPIRO.JPG
150 KB -

PCA9685.jpg
100 KB
-- da sich offenbar doch einige für den niedlichen Roboter interessieren, sollte ich meine bisherige Herangehensweise (soweit möglich) erläutern. Vor einiger Zeit stieß' ich auf diesen Beitrag: (c/p) http://translate.googleusercontent.com/translate_c?depth=1&hl=fr&rurl=www.google.com&sl=auto&tl=de&u=http://ms-robot.com//Forum/viewforum.php%3Ff%3D10%26sid%3D611c234b41c2af9822323fd536d8b57b&usg=ALkJrhiaManm1Qtu95Y6nAm2za1wo2mnZQ Das hier verwendete "Blueboard" Blue Edition zusammen mit dem OpenBot OS hat fast alles, was ich brauchte. Nur passt es nicht, - einige Servokabel reichen nicht bis zum Raspberry-Pi, der ja im Kopf sitzt. Daher habe ich den PCA9685 genommen und ihm eine seperate Platine gegönnt. nach und nach werde ich auch Sensoren und Kamera aktivieren ... Für einfache Bewegungsabläufe schreibt man eben Python-Scripte die dann( über wlan-remote) ausgeführt werden. Viel Spass beim Nachbau. Und dies ist nur als Anregung zu verstehen !
-- für die ersten "Gehversuche" mit dem PCA9685 empfehle ich: https://learn.adafruit.com/raspberry-pi-wifi-controlled-cat-laser-toy/software mit Webbrowser-Steuerung;
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.