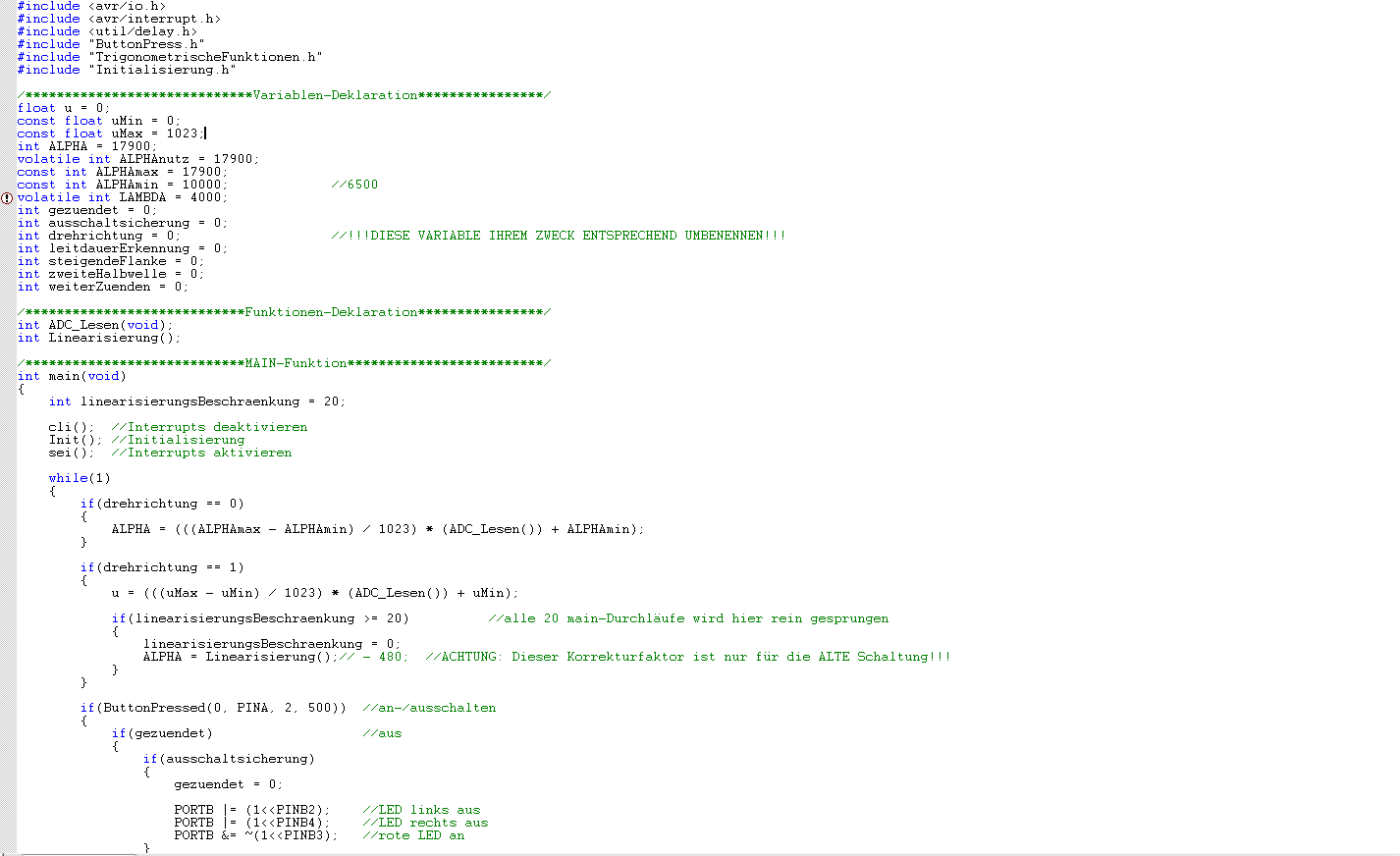
1 | #include <avr/io.h>
|
2 | #include <avr/interrupt.h>
|
3 | #include <util/delay.h>
|
4 | #include "ButtonPress.h"
|
5 | #include "TrigonometrischeFunktionen.h"
|
6 | #include "Initialisierung.h"
|
7 |
|
8 | /*****************************Variablen-Deklaration****************/
|
9 | float u = 0;
|
10 | const float uMin = 0;
|
11 | const float uMax = 1023;
|
12 | int ALPHA = 17900;
|
13 | volatile int ALPHAnutz = 17900;
|
14 | const int ALPHAmax = 17900;
|
15 | const int ALPHAmin = 10000; //6500
|
16 | volatile int LAMBDA = 4000;
|
17 | int gezuendet = 0;
|
18 | int ausschaltsicherung = 0;
|
19 | int drehrichtung = 0; //!!!DIESE VARIABLE IHREM ZWECK ENTSPRECHEND UMBENENNEN!!!
|
20 | int leitdauerErkennung = 0;
|
21 | int steigendeFlanke = 0;
|
22 | int zweiteHalbwelle = 0;
|
23 | int weiterZuenden = 0;
|
24 |
|
25 | /****************************Funktionen-Deklaration****************/
|
26 | int ADC_Lesen(void);
|
27 | int Linearisierung();
|
28 |
|
29 | /****************************MAIN-Funktion*************************/
|
30 | int main(void)
|
31 | {
|
32 | int linearisierungsBeschraenkung = 20;
|
33 |
|
34 | cli(); //Interrupts deaktivieren
|
35 | Init(); //Initialisierung
|
36 | sei(); //Interrupts aktivieren
|
37 |
|
38 | while(1)
|
39 | {
|
40 | if(drehrichtung == 0)
|
41 | {
|
42 | ALPHA = (((ALPHAmax - ALPHAmin) / 1023) * (ADC_Lesen()) + ALPHAmin);
|
43 | }
|
44 |
|
45 | if(drehrichtung == 1)
|
46 | {
|
47 | u = (((uMax - uMin) / 1023) * (ADC_Lesen()) + uMin);
|
48 |
|
49 | if(linearisierungsBeschraenkung >= 20) //alle 20 main-Durchläufe wird hier rein gesprungen
|
50 | {
|
51 | linearisierungsBeschraenkung = 0;
|
52 | ALPHA = Linearisierung();// - 480; //ACHTUNG: Dieser Korrekturfaktor ist nur für die ALTE Schaltung!!!
|
53 | }
|
54 | }
|
55 |
|
56 | if(ButtonPressed(0, PINA, 2, 500)) //an-/ausschalten
|
57 | {
|
58 | if(gezuendet) //aus
|
59 | {
|
60 | if(ausschaltsicherung)
|
61 | {
|
62 | gezuendet = 0;
|
63 |
|
64 | PORTB |= (1<<PINB2); //LED links aus
|
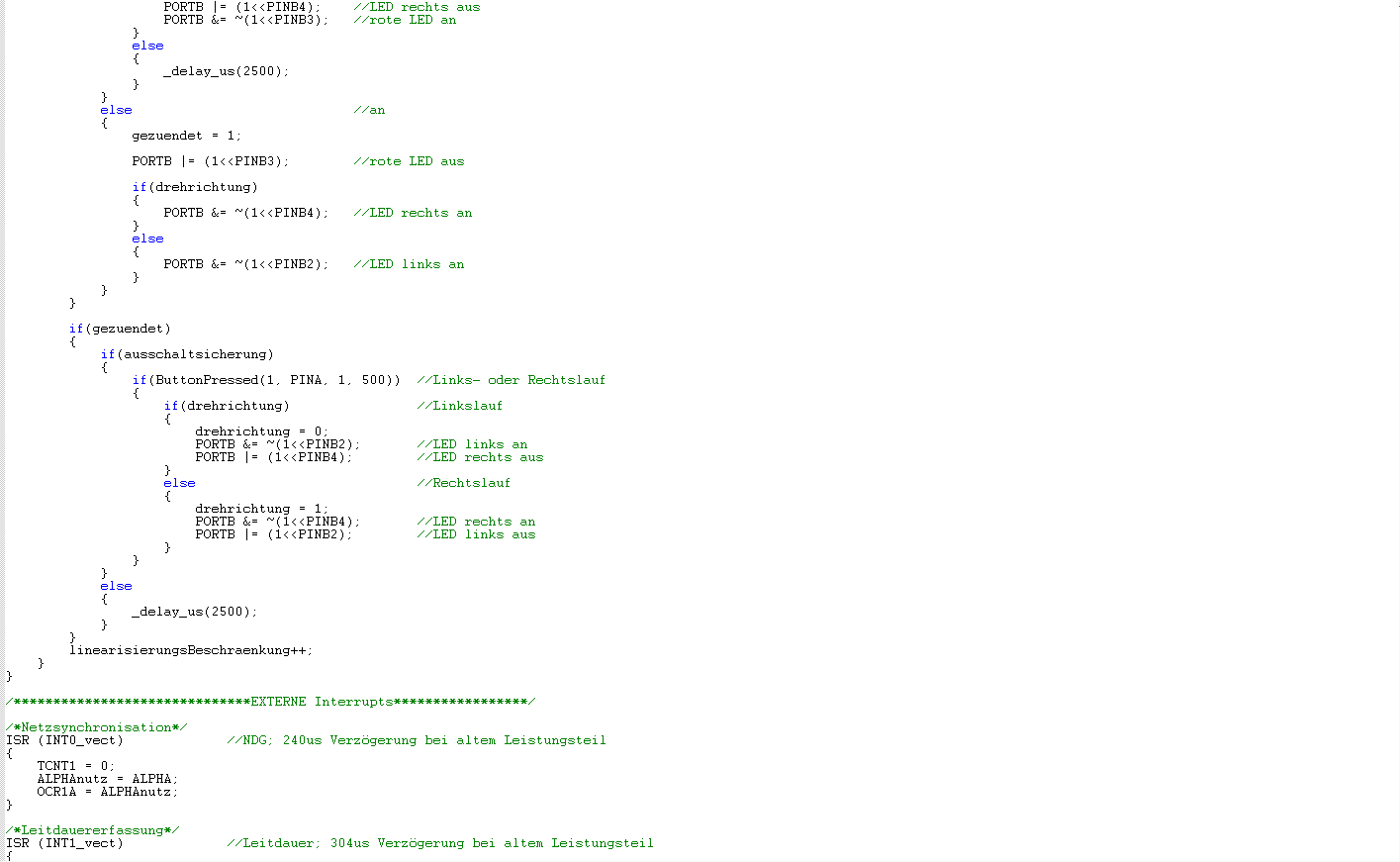
65 | PORTB |= (1<<PINB4); //LED rechts aus
|
66 | PORTB &= ~(1<<PINB3); //rote LED an
|
67 | }
|
68 | else
|
69 | {
|
70 | _delay_us(2500);
|
71 | }
|
72 | }
|
73 | else //an
|
74 | {
|
75 | gezuendet = 1;
|
76 |
|
77 | PORTB |= (1<<PINB3); //rote LED aus
|
78 |
|
79 | if(drehrichtung)
|
80 | {
|
81 | PORTB &= ~(1<<PINB4); //LED rechts an
|
82 | }
|
83 | else
|
84 | {
|
85 | PORTB &= ~(1<<PINB2); //LED links an
|
86 | }
|
87 | }
|
88 | }
|
89 |
|
90 | if(gezuendet)
|
91 | {
|
92 | if(ausschaltsicherung)
|
93 | {
|
94 | if(ButtonPressed(1, PINA, 1, 500)) //Links- oder Rechtslauf
|
95 | {
|
96 | if(drehrichtung) //Linkslauf
|
97 | {
|
98 | drehrichtung = 0;
|
99 | PORTB &= ~(1<<PINB2); //LED links an
|
100 | PORTB |= (1<<PINB4); //LED rechts aus
|
101 | }
|
102 | else //Rechtslauf
|
103 | {
|
104 | drehrichtung = 1;
|
105 | PORTB &= ~(1<<PINB4); //LED rechts an
|
106 | PORTB |= (1<<PINB2); //LED links aus
|
107 | }
|
108 | }
|
109 | }
|
110 | else
|
111 | {
|
112 | _delay_us(2500);
|
113 | }
|
114 | }
|
115 | linearisierungsBeschraenkung++;
|
116 | }
|
117 | }
|
118 |
|
119 | /******************************EXTERNE Interrupts*****************/
|
120 |
|
121 | /*Netzsynchronisation*/
|
122 | ISR (INT0_vect) //NDG; 240us Verzögerung bei altem Leistungsteil
|
123 | {
|
124 | TCNT1 = 0;
|
125 | ALPHAnutz = ALPHA;
|
126 | OCR1A = ALPHAnutz;
|
127 | }
|
128 |
|
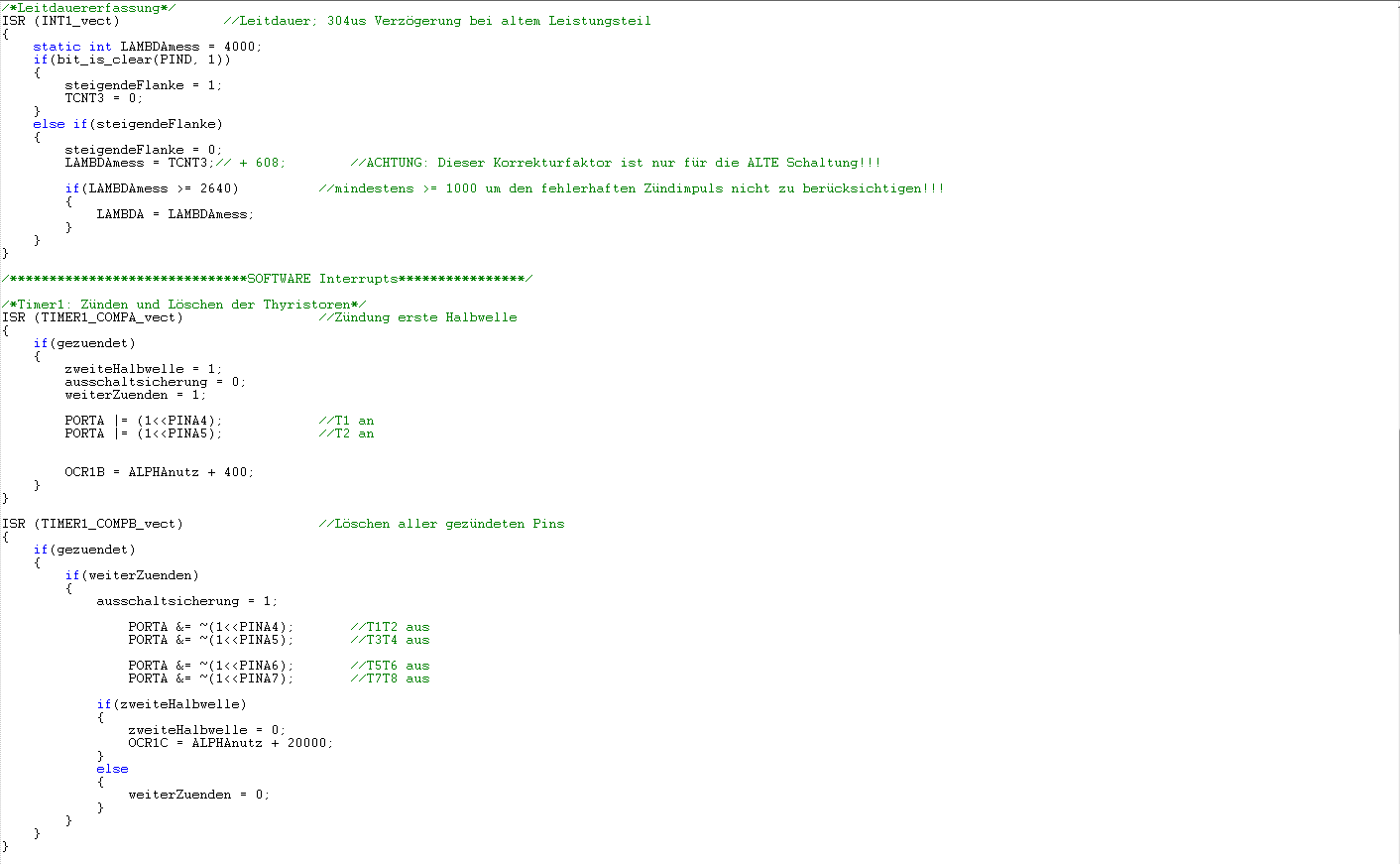
129 | /*Leitdauererfassung*/
|
130 | ISR (INT1_vect) //Leitdauer; 304us Verzögerung bei altem Leistungsteil
|
131 | {
|
132 | static int LAMBDAmess = 4000;
|
133 | if(bit_is_clear(PIND, 1))
|
134 | {
|
135 | steigendeFlanke = 1;
|
136 | TCNT3 = 0;
|
137 | }
|
138 | else if(steigendeFlanke)
|
139 | {
|
140 | steigendeFlanke = 0;
|
141 | LAMBDAmess = TCNT3;// + 608; //ACHTUNG: Dieser Korrekturfaktor ist nur für die ALTE Schaltung!!!
|
142 |
|
143 | if(LAMBDAmess >= 2640) //mindestens >= 1000 um den fehlerhaften Zündimpuls nicht zu berücksichtigen!!!
|
144 | {
|
145 | LAMBDA = LAMBDAmess;
|
146 | }
|
147 | }
|
148 | }
|
149 |
|
150 | /******************************SOFTWARE Interrupts****************/
|
151 |
|
152 | /*Timer1: Zünden und Löschen der Thyristoren*/
|
153 | ISR (TIMER1_COMPA_vect) //Zündung erste Halbwelle
|
154 | {
|
155 | if(gezuendet)
|
156 | {
|
157 | zweiteHalbwelle = 1;
|
158 | ausschaltsicherung = 0;
|
159 | weiterZuenden = 1;
|
160 |
|
161 | PORTA |= (1<<PINA4); //T1 an
|
162 | PORTA |= (1<<PINA5); //T2 an
|
163 |
|
164 |
|
165 | OCR1B = ALPHAnutz + 400;
|
166 | }
|
167 | }
|
168 |
|
169 | ISR (TIMER1_COMPB_vect) //Löschen aller gezündeten Pins
|
170 | {
|
171 | if(gezuendet)
|
172 | {
|
173 | if(weiterZuenden)
|
174 | {
|
175 | ausschaltsicherung = 1;
|
176 |
|
177 | PORTA &= ~(1<<PINA4); //T1T2 aus
|
178 | PORTA &= ~(1<<PINA5); //T3T4 aus
|
179 |
|
180 | PORTA &= ~(1<<PINA6); //T5T6 aus
|
181 | PORTA &= ~(1<<PINA7); //T7T8 aus
|
182 |
|
183 | if(zweiteHalbwelle)
|
184 | {
|
185 | zweiteHalbwelle = 0;
|
186 | OCR1C = ALPHAnutz + 20000;
|
187 | }
|
188 | else
|
189 | {
|
190 | weiterZuenden = 0;
|
191 | }
|
192 | }
|
193 | }
|
194 | }
|
195 |
|
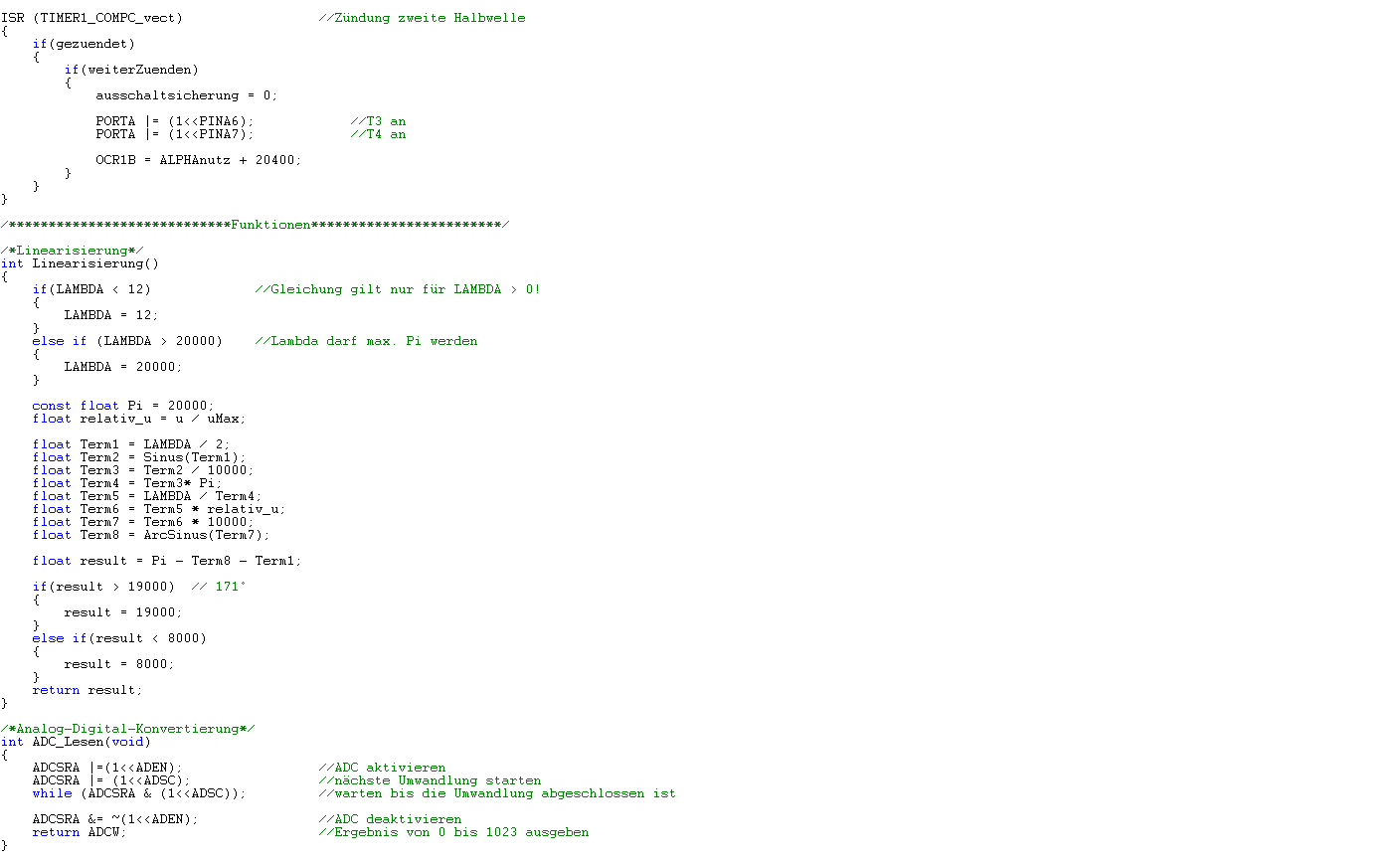
196 | ISR (TIMER1_COMPC_vect) //Zündung zweite Halbwelle
|
197 | {
|
198 | if(gezuendet)
|
199 | {
|
200 | if(weiterZuenden)
|
201 | {
|
202 | ausschaltsicherung = 0;
|
203 |
|
204 | PORTA |= (1<<PINA6); //T3 an
|
205 | PORTA |= (1<<PINA7); //T4 an
|
206 |
|
207 | OCR1B = ALPHAnutz + 20400;
|
208 | }
|
209 | }
|
210 | }
|
211 |
|
212 | /****************************Funktionen************************/
|
213 |
|
214 | /*Linearisierung*/
|
215 | int Linearisierung()
|
216 | {
|
217 | if(LAMBDA < 12) //Gleichung gilt nur für LAMBDA > 0!
|
218 | {
|
219 | LAMBDA = 12;
|
220 | }
|
221 | else if (LAMBDA > 20000) //Lambda darf max. Pi werden
|
222 | {
|
223 | LAMBDA = 20000;
|
224 | }
|
225 |
|
226 | const float Pi = 20000;
|
227 | float relativ_u = u / uMax;
|
228 |
|
229 | float Term1 = LAMBDA / 2;
|
230 | float Term2 = Sinus(Term1);
|
231 | float Term3 = Term2 / 10000;
|
232 | float Term4 = Term3* Pi;
|
233 | float Term5 = LAMBDA / Term4;
|
234 | float Term6 = Term5 * relativ_u;
|
235 | float Term7 = Term6 * 10000;
|
236 | float Term8 = ArcSinus(Term7);
|
237 |
|
238 | float result = Pi - Term8 - Term1;
|
239 |
|
240 | if(result > 19000) // 171°
|
241 | {
|
242 | result = 19000;
|
243 | }
|
244 | else if(result < 8000)
|
245 | {
|
246 | result = 8000;
|
247 | }
|
248 | return result;
|
249 | }
|
250 |
|
251 | /*Analog-Digital-Konvertierung*/
|
252 | int ADC_Lesen(void)
|
253 | {
|
254 | ADCSRA |=(1<<ADEN); //ADC aktivieren
|
255 | ADCSRA |= (1<<ADSC); //nächste Umwandlung starten
|
256 | while (ADCSRA & (1<<ADSC)); //warten bis die Umwandlung abgeschlossen ist
|
257 |
|
258 | ADCSRA &= ~(1<<ADEN); //ADC deaktivieren
|
259 | return ADCW; //Ergebnis von 0 bis 1023 ausgeben
|
260 | }
|