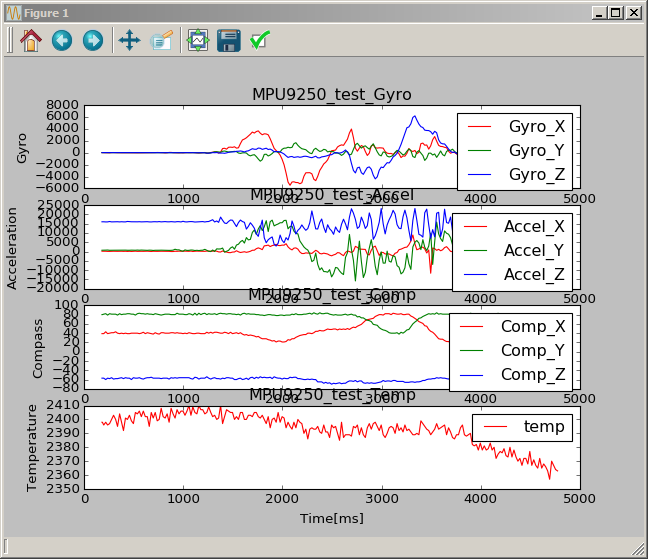
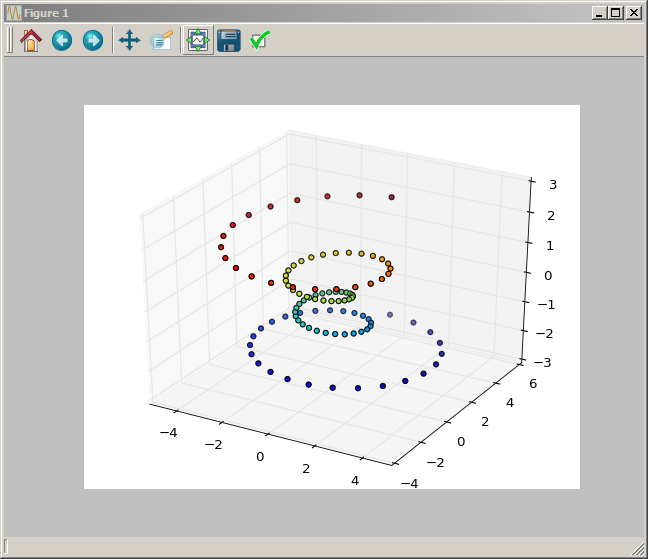
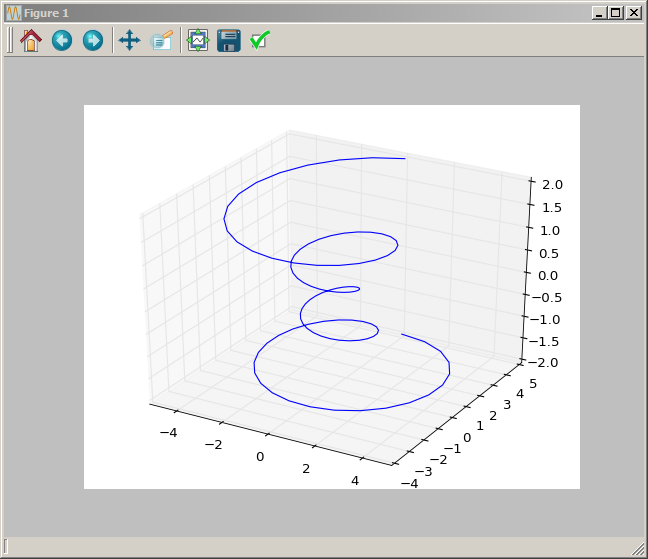
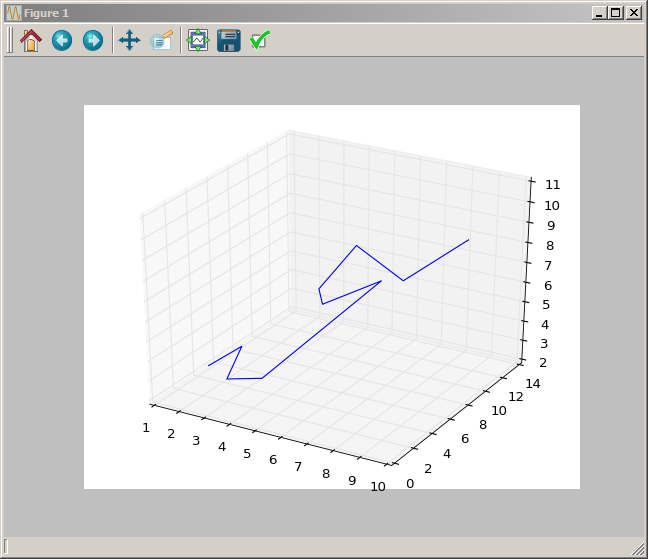
Hallo, I benoetige Eure Hilfe beim Plotten von IMU Daten. Ich habe Daten von einer IMU(MPU9250) in einer CSV Datei. Ein Plot von den Daten habe ich schon hinbekommen(asbaufaehig, ich arbeite dran), siehe Bild Istzustand. Mein naechstes Ziel, ist es die Daten so wie in den angehaengten Bildern in 3D zu plotten, also als 3D Pfad, siehe Bilder Zielzustand. Und hier komme ich irgendwie nicht weiter. Ich bin noch Python Neuling, deswegen frage ich Euch. Mich interessieren erstmal nur die rohen Daten von Gyro und Beschleunigungssensor. Auf irgendwelche Optimierungen und Filter lege ich erstmal nicht so viel Wert. Mir ist auch irgendwie klar, dass ich da noch Weginformationen benoetige, die ich aber derzeit noch nicht habe. Es reicht mir aus, erstmal anzunehmen, dass zwischen jedem Wert 1mm zurueckgelegt wurde. Diese Werte kann ich mir erzeugen. Also Ich logge mit 50Hz, dann bewege ich mich mit 5cm/s. Ich weis auch nicht, ob es die Sache vereifachen wuerde, wenn ich die Daten als Quaternions logge. Ich benutze Anaconda 3 (2.5.0) mit python 3.5. Wenn jemand auch sonst noch Informationen ueber die Umrechnung der Daten hat, wuerde ich mich auch drueber freuen. So 100%ig klar ist mir das alles auch noch nicht. Vielen Dank, Mark
Angehängte Dateien:
-

Istzustand.PNG
86 KB -

Zielzustand_1.PNG
50 KB -

Zielzustand2.PNG
54 KB -

Zielzustand3.PNG
51 KB
Ok, du musst dich erstmal einlesen in das Thema. Sonst machen wir hier eine Grundlagenvorlesung über technische Mechanik daraus :) Grundsätzlich wirst du ohne Optimierungen und Filter nicht auskommen. Ein irgendwie sinnvolles Bild kannst du sonst nicht erzeugen. Und die Weginformation steckt in deinem Signal schon drin, denk mal drüber nach. Das einzige was dir fehlt ist der Ausgangszustand. Da musst du eine Annahme machen (IMU liegt ruhig auf dem Tisch).
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.