
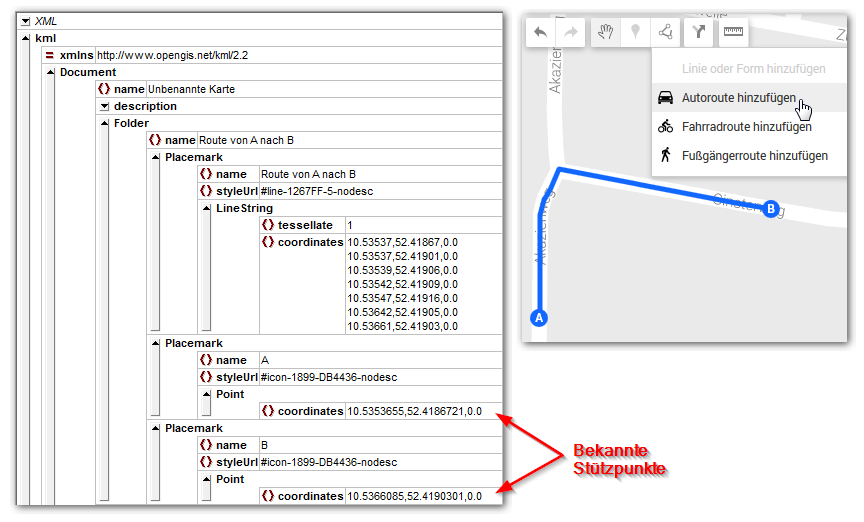
Hallo zusammen, bei einer Autofahrt wird ca. alle 30 Sekunden die GPS-Position gespeichert. Wenn man nun aus den Stützpunkten eine Google-Maps-KML-Datei erzeugt, gehen die Luftlinien natürlich manchmal diagonal über Wohngebiete, Sportplätze usw.. Wenn man in Google-Maps manuell eine Autoroute einfügt (rechtes Bild), berechnet Google die Zwischenpunkte so, dass die Linie entlang der Straße verläuft. Alle neuen Messdaten jeweils 'per Mauspfeil' von Hand auszuwählen, ist viel zu zeitaufwendig. Kennt jemand eine Möglichkeit, den Straßenverlauf zwischen zwei Stützpunkten automatisiert zu ermitteln? Klar: Man könnte die Vektor-Daten von OSM nutzen und auf dieser Basis quasi ein eigenes Routenplanungs-Programm schreiben. Aber das ist sehr aufwendig und Routenplaner gibt es eigentlich bereits wie Sand am Meer. Aber welcher unterstützt eine Automatisierung? Kennt jemand eine Software, mit der man das Problem automatisiert lösen kann? VG Torsten
Angehängte Dateien:
-

Problem.png
87 KB -

Autoroute.png
47 KB
:
Bearbeitet durch User
Online als service gibt es einiges, mit "route planning api" z.B. http://wiki.openstreetmap.org/wiki/OpenRouteService https://graphhopper.com/ https://developers.google.com/maps/documentation/directions/intro
Hallo ! Besser ist es evntl. alle 20 bis 50m eine Position zu speichern. Sonst sind es bei 50 km/h etwas über 400m - ganz schön grob. MfG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.