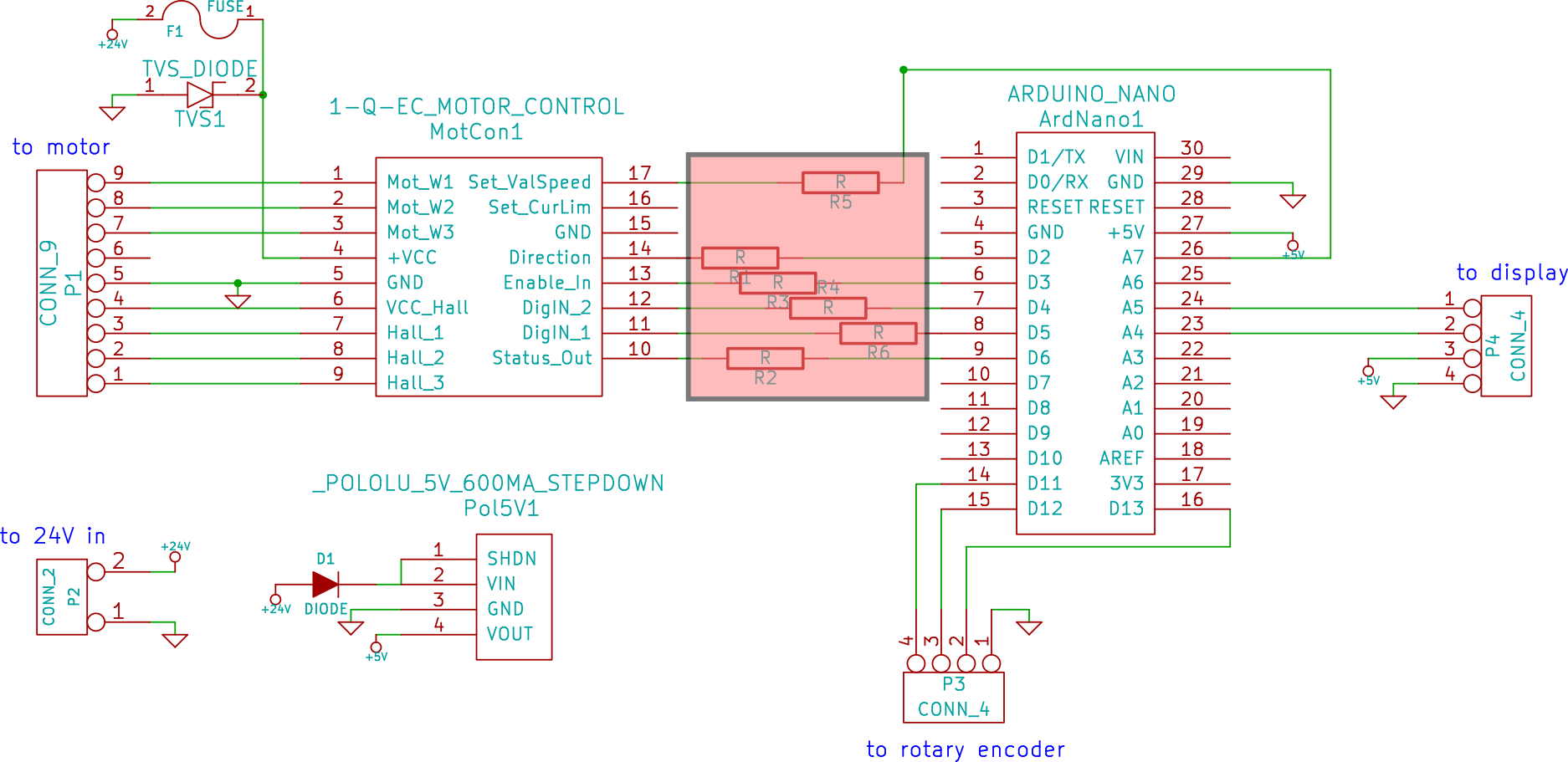
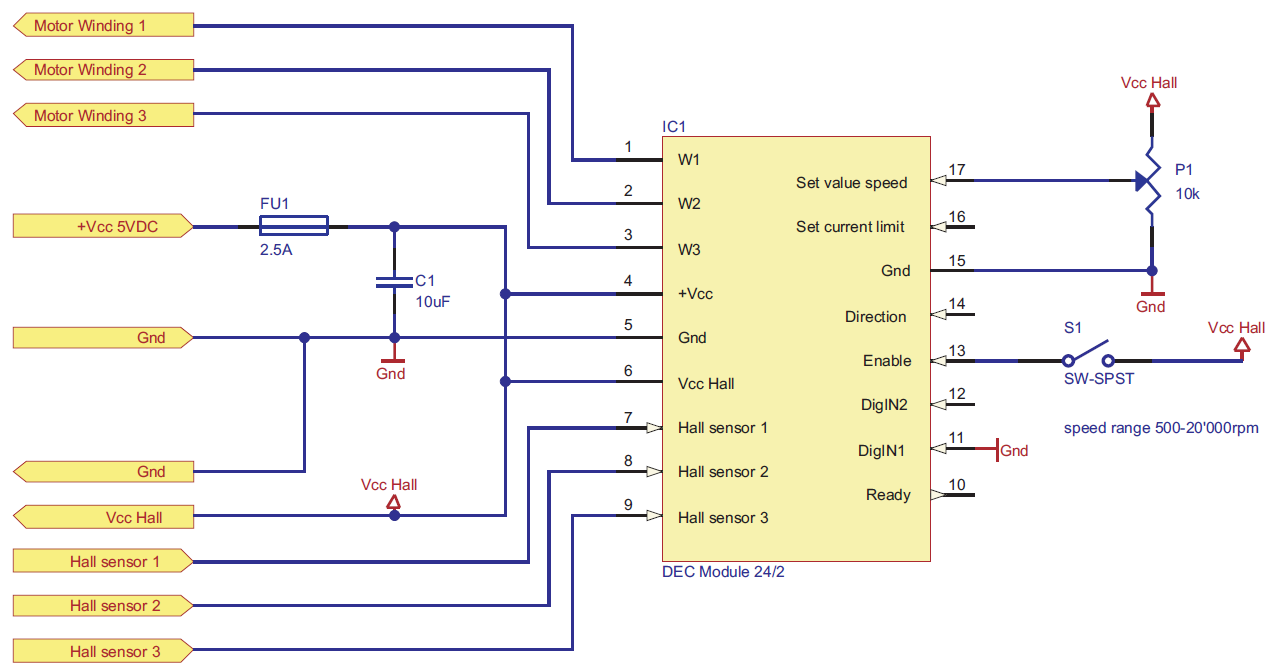

Hallo zusammen! Ich würde gerne einen bürstenlosen Gleichstrommotor mit Hilfe eines Arduino Nano und der Motorsteuerung 1-Q-EC Amplifier DEC Module 24/2 (https://www.google.de/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&cad=rja&uact=8&ved=0ahUKEwio9_O37f_QAhXMWRQKHU1PAAgQFggmMAE&url=https%3A%2F%2Fforum.arduino.cc%2Findex.php%3Faction%3Ddlattach%3Btopic%3D434094.0%3Battach%3D186427&usg=AFQjCNFaBNUIWiFMvXJiOjUzlMXbmH32fQ&bvm=bv.142059868,d.d24) ansteuern. Dazu habe ich den angehängten Schaltplan erstellt. 24 V für die Motorsteuerung und den Motor werden über ein Tischnetzteil bereitgestellt, für den Arduino habe ich einen 5V Pololu Step-Down Spannungsregler eingeplant. Könntet ihr vielleicht kurz über den Schaltplan schauen und mir sagen ob so alles in Ordnung wäre oder ob es noch ein paar Dinge zu verbessern gibt? Ich frage mich auch ob ich zwischen den Ausgängen des Arduino und den Eingängen der Motorsteuerung einen zusätzlichen Widerstand brauche (markierter Bereich)? Im Datenblatt der Motorsteuerung ist in der Minimalbeschaltung kein zusätzlicher Widerstand eingezeichnet, im Schaltplan des Evaluation Boards sind jedoch 10k-Widerstände zu den Eingängen Direction und Enable, bzw. 220 Ohm zum Eingang Set value speed eingezeichnet. Die Eingangsimpedanz liegt bei den drei Eingängen bei 100k; DigIN1 und 2 besitzen einen 15k Pull-Up. Von dem her würde ich sagen dass man die zusätzlichen Widerstände weglassen kann. Stimmt das so? Besten Dank und viele Grüße
Angehängte Dateien:
-

motor_platine.png
180 KB -

motcon_min.PNG
68 KB -

motcon_eval.png
120 KB
Okay, also ich werde jetzt die markierten Widerstände weglassen. Außerdem ist mir aufgefallen, dass Pin A7 ja nur ein analoger Input ist. Set_ValSpeed verbinde ich deshalb nun mit Pin D3 um per PWM die benötigte Spannung zum Regeln der Drehzahl zu erzeugen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.