
{kind=link}
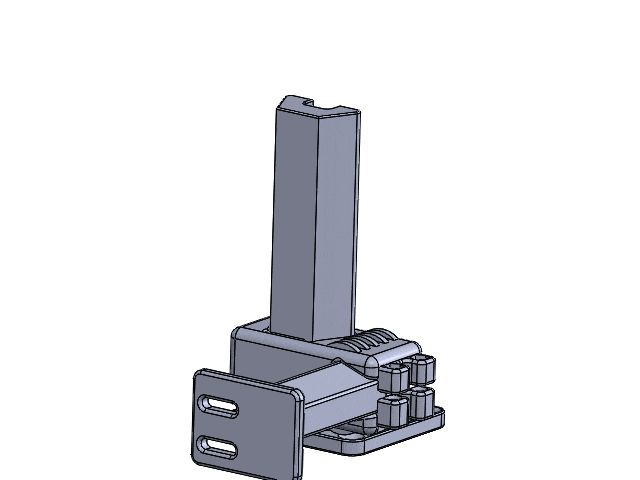
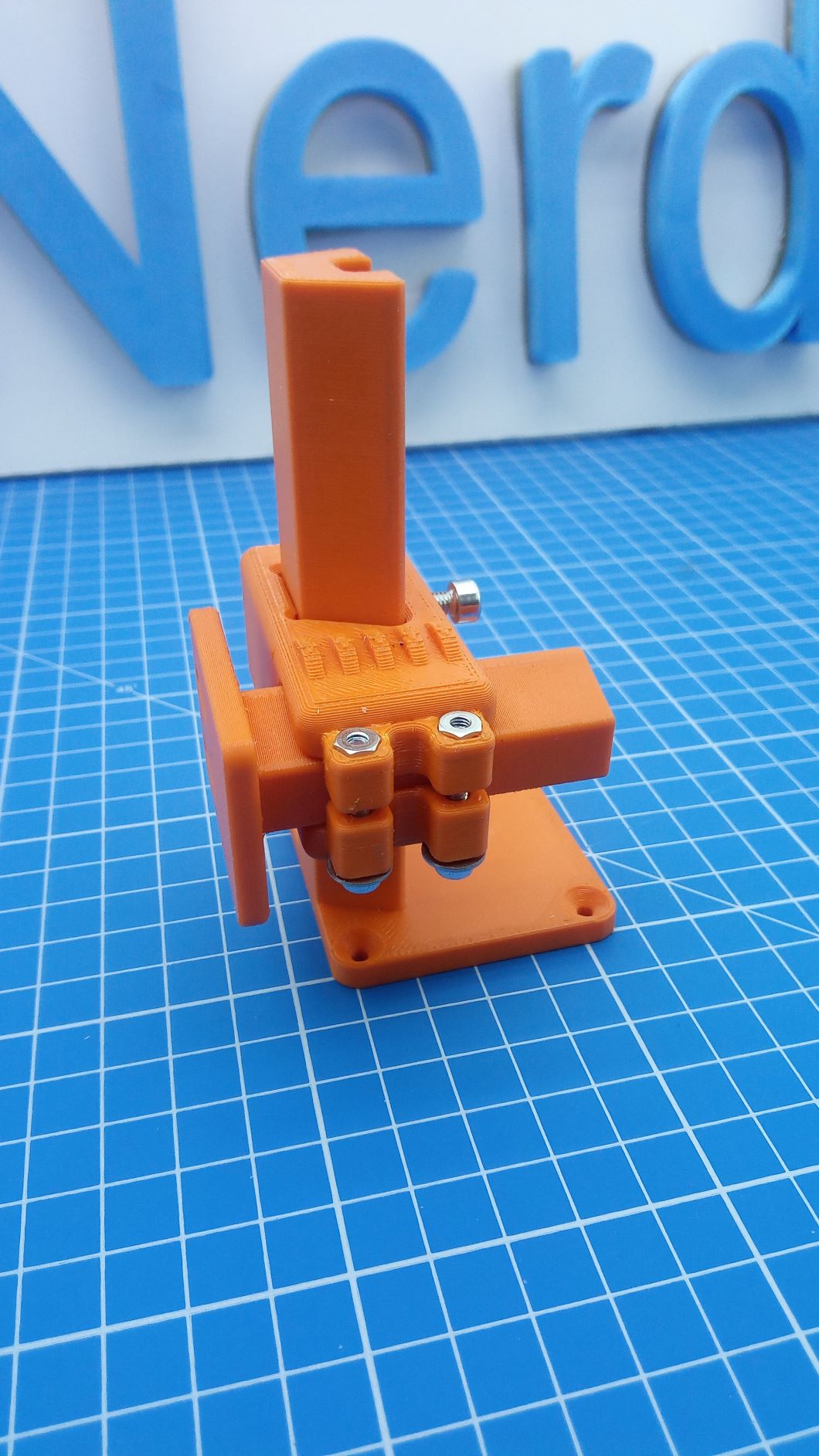
Ich bin von Arduino und Pi Projekten über die Jahre immer mehr in Richtung CAD gegangen. Mein neustes Werk ist ein sehr leichter und stabiler Ständer, der in zwei Achsen verstellbar ist. Man kann ihn zur exakten Positionierung von Sensoren oder anderen Bauteilen benutzen. Ich hab auch eine ausführliche Beschreibung des Projekts auf NERD CORNER hochgeladen: https://nerd-corner.com/2-adjustable-axis-cad-design/ Motivation: Diesen Ständer habe ich ursprünglich zum Halten einer optischen Mausplatine für die Wegmessung eines Rades entworfen. Im Laufe der Zeit stellte sich heraus, dass dieser Ständer viel mehr kann als ursprünglich gedacht. Oft bestehen diese Ständer aus Metall und Kunststoff und sind z.B. bei Hallsensoren durch das magnetische Metall störend bei der Auslesung der Daten. Außerdem sind viele Ständer zu groß oder zu schwer haben keine Löcher zum anschrauben und so weiter. Wie ich ihn konstruiert habe: Bei der Konstruktion des Ständers habe ich mich für eine sogenannte Schwalbenschwanzführung entschieden. Diese Schwalbenschwanzführung ist eine klassische Führungsvariante im Maschinenbau und wird heute noch sehr oft verwendet. Die Vorteile liegen auf der Hand, bei den beiden Schrägen wird eine parallele Führung erzwungen und eine Verdrehung des Schlittens verhindert. Bei runden Führungen brauchen sie immer zwei Stück um diesen Effekt zu erhalten. Die Schrägen bringen auch präzise Positionierung, wenn sie die Klemmschraube auf der anderen Seite anbringen und so den Schlitten zu den Schrägen ziehen. In diesem Fall sind zwei Schwalbenschwanzführungen vorhanden in der Z-Achse und Y-Achse. Die Verfahr Wege in der Y-Achse betragen 23mm und in der Z-Achse 75mm., für die meisten Positionierungen ausreichend. Die dezentrale Platzierung der Führungssäule auf der Bodenplatte bringt mehr Auskragung in der Y-Achse und erleichtert das Anschrauben der Bodenplatte. An der Montageplatte sind zwei Langlöcher damit auch angebrachte Sensoren in der X-Achse leicht korrigiert werden können. Die Langlöcher waren wirklich bei der Positionierung der optischen Mausplatine hilfreich. Die halbrunden Rippen auf dem Schlitten dienen zur Verstärkung der doch dünnen Wandstärke an dem Schwalbenschwanzführungsdurchbruch. Diese Rippenkonstruktion ist sehr stabil und widerstandsfähig gegen Druck in vertikaler Richtung. Zwei unterschiedliche Arretier Systeme kommen zum Einsatz am Schlitten in der Z-Achse bohren sich leicht zwei M4 Schrauben in das Material des Ständers. Dies bedeutet aber auch, dass man nur eine begrenzte Anzahl von Klemmungen ausüben kann da ja eine Deformation des Materials stattfindet. Bei der zweiten Arretierung kommt es zur keine Materialabtragung dafür wird das Material gestreckt oder gestaucht. Welche Art auf Dauer besser ist zeigt ich in der Zukunft. Bei dem Gewinde am Schlitten für die Z-Achse wird das Gewinde mit einem Gewindeschneider M4 geschnitten. Bei der Klemmung an der Y-Achse benutze ich für das Gewinde Einpressmuttern. Wenn man nicht hundertmal am Tag die Klemmungen öffnet und schließt, hält es sicher viele Jahre. Zahlt sich halt immer aus was Ordentliches zu Konstruieren.
Angehängte Dateien:
-

ezgif.com-optimize.gif
500 KB -

Mausplatinenhalter2.jpg
160 KB -

IMG_20201029_140310.jpg
240 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.