Hallo zusammen, ich habe mir einen NAVTEX Empfänger nach dem PDF von DL4BBL "A NAVTEX Receiver for the DXer" gebaut. Als Antenne habe ich einen Ferritestab mit 160 Windungen 0,2mm Cu Lackdraht bewickelt (-> 1,850mH) und einen Dreko mit 52pF (max. 70pF) angeschlossen. Das ist sicher nicht optimal, da ich keine Impedanz von 50 Ohm errreiche. Ich bin leider nicht in HF Sachen bewandert, daher meine Frage an euch: Könnt ihr mir bitte eine (einfache -> selbst zu bauende) Antenne incl Anpassung beschreiben / verlinken? Rahmendaten: 518 kHz mit SITOR-B (AMTOR FEC) 170 Hz Frequenzshift 100 Baud FSK Eingang für 50 Ohm Antenne Vielen Dank für eure Mühe! Dirk
Statt Ferrit- werden oft Rahmenantennen für den Mittelwellenbereich empfohlen http://de.wikipedia.org/wiki/Rahmenantenne dort wird eine Bauanleitung verlinkt für 531 kHz: http://www.fading.de/rahmenantenne.php
Danke Christoph! Ich habe mal in Anlehnung an die in deinem Link gezeigte Rahmenantenne meinen Ferritstab mit einer zweiten Spule versehen. Die erste (160 W) habe ich mit einem C-Trimmer auf 518kHz abgeglichen. Die zweite (15 W) an den Eingang angeschlossen. Leider rauscht es nur. Ich kann aber am rauschen erkennen ob meine Funkmaus gerade sendet :-/ Wie sieht es mit Stabantennen aus? Eine Richtantenne ist eigentlich nicht erwünscht. Die Ferritantenne war nur die kleinste Antenne die ich kenne. Es gibt auch komerzielle Empfänger mit Ferritantenne, muß also irgendwie gehen :-) Viele Grüße, Dirk
Hallo Dirk Annahme: Falls die der Schwingkreis ohne Last eine Güte von ~40 hat, beträgt der Innenwiderstand ~350 kOhm. Mit 16 Windungen hast Du dann erst auf 3.5k runtertransformiert. Mach mal sekundär erst 1 Windung drauf und suche mit dem Drehkondensator den Peak. Der Peak sollte sehr schmalbandig sein. Probiers dann mal mit 2-3 Windungen. Wenn die Resonanz die doppelte Breite hat, sollte die Anpassung einigermaßen stimmen. Welche Möglichkeiten zu Messungen hast Du? Eine Alternative wäre, die 16 Wdg. zu lassen und einen Vorverstärker mit nem JFet dahinter zu schalten. Gruß, Bernd
Hallo Dirk, bei mir hat es es auch was gedauert, bis ich was empfangen konnte (Aktivantenne). Eigentlich selbstverständlich und ich traue mich kaum, es zu schreiben: Bitte genau die Sendepläne der einzelnen Stationen anschauen und ggf. UTC Angaben berücksichtigen. Gruß, M
Hallo M.M. ja das stimmt, bei Navtex muß man wirklich auf die Sendezeiten warten! Ich habe noch einen Sangean ATS 909 den ich am PC mit JVComm32 erfolgreich betreibe. Die Zeiten stimmen also :-) Hallo B e r n d W. zu Hause habe ich DMM und Oszi in der Arbeit hätte ich so ziemlich alles was das Elektronikerherz begehrt. Muß da nur einen guten Zeitpunkt abpassen ;-) Die 160W haben 1.85mH daher habe ich den C auf 51pF eingestellt. Sollte 518kHz ergeben. Die 16W haben 15µH. Da ich mit Xr = 2*Pi*f*L ca. 48Ohm sind. Ich bin dieses WE leider nicht zum Basteln gekommen :-( Viele Grüße, Dirk
Hallo Dirk Das sekundärseitige XL spielt keine Rolle. Du benötigst den Innenwiderstand des Parallel-Schwingkreises in Resonanz. Die Güte liegt zwischen ca. 30 und 70. Du könntest den genauen Wert per sehr lose angekoppeltem Funktionsgenerator und Oszi ausmessen. Q = F_resonanz / Bandbreite bei -3dB Dann: Rp = Q * sqr(L/C) = 50 * sqr(1.85e-3 / 51e-12) = 301 kOhm Rp muß nun auf R2 = 50 Ohm runtertransformiert werden: N2 = N1 * sqr(R2 / Rp) N2 = 160 * sqr(50 / 301k) N2 = 2.06 -> 2 Windungen Gruß, Bernd
Grrrrrr :-((( Vielen Dank für eure Hilfe, doch nicht nur ich kann nichts empfangen, sondern jeder der nur in der Reichweite von dem Sender Pinneberg sitzt. Habe ich gerade auf der DWD Seite gefunden: NAVTEX der Bundesrepublik Deutschland ACHTUNG Sender Pinneberg : In der Zeit vom 26.10. bis 08.11.2010 werden voraussichtlich die Antennen für die Navtex - Ausstrahlung abgeschaltet. Viele Grüße, Dirk
Um 17 Uhr ist Dienstschluß. Da wird die Antenne wieder gehen ;-)
Hallo zusammen, ich habe jetzt eine gut funktionierende Antenne gefunden und nachgebaut: pa0rdt-Mini-Whip Jetzt ist mein Empfangssignal schön und ich kann die beiden Ferquenzen (Mark und Space) gut mit dem Oszi unterscheiden. Jetzt bin ich dabei ein Software zu schreiben die den Datenstrom auswertet. Dabei bin ich (wieder ;) auf zwei Fragen aus dem HF Bereich gestoßen. Auch googeln hat mich nicht schlauer werden lassen.... 1. Die Daten werden bei NAVTEX in SITOR-B (AMTOR FEC) mit 7 Bit und 100 Baud übertragen. Was ich nicht gefunden habe: Wird das MSB oder das LSB (der 7 Bits) zuerst gesendet? 1.b. Start und Stop Bits gibt es nicht richtig? 2. Da im Empfänger die Mischerfrequenz einmal über und einmal unter der Sendefrquenz liegt soll sich angeblich das Ausgangssignal invertieren. Ist das Richtig? NAVTEX wird im LSB (Lower Side Band) gesendet. Auf dem Oszi konnte ich keinen Unterschied feststellen. Die Mark (hohe) Frequenz war immer "1" und Space (niedrige) immer "0". Das ist gut an dem Sync Byte ALPHA (0x0F) zu sehen. Da sind nacheinander drei Bit "0" und vier "1". Das wäre es zunächst :-) Viele Grüße, Dirk
Dirk schrieb: > 1. Die Daten werden bei NAVTEX in SITOR-B (AMTOR FEC) mit 7 Bit und 100 > Baud übertragen. Was ich nicht gefunden habe: Wird das MSB oder das LSB > (der 7 Bits) zuerst gesendet? Habe jetzt nicht extra nachgeguckt bei SITOR, aber praktisch alle Übertragungsprotokolle übertragen das LSB zuerst. > Start und Stop Bits gibt es nicht richtig? Ja, die Synchronisation wird über spezielle Bitfolgen erzielt.
Dirk schrieb: > Die 160W haben 1.85mH daher habe ich den C auf 51pF eingestellt. Sollte > 518kHz ergeben. Die 16W haben 15µH. Da ich mit Xr = 2*Pi*f*L ca. 48Ohm > sind. Das ergibt nur mit ziemlich Glück 518kHz, weil die Streukapazität nicht berücksichtigt ist. Das L/C ist schon relativ ungünstig, das L sollte nicht über 1 mH sondern eher bei so 600uH liegen, dafür kommt der Kondensator dann in eine Größenordnung 160pf. Und den macht man abstimmbar und sucht damit auf der Wunschfrequenz das Resonanzmaximum. Das Auskoppeln mittels separater kleiner Spule wurde ja schon erwähnt... Gruß...Maschinist
Komischerweise habe ich auch eine Idee im Kopf spuckend seit einigen Tagen, das eine E-Antenne wohlmöglich effektiver ist als eine Ferritantenne. Muß das mal ausprobieren. Außerdem ist deren Strahlungsdiagramm offensichtlich nicht so empfindlich gegenüber Skywellen. Das macht es für DCF77 interessant. Vielleicht ist die Erklärung einfach die, das zu Zeiten als Ferritantennen in Mode kamen, die damaligen JFETs nicht sonderlich gut waren?? Hm.
Zu eurer Info: Ich habe den Tag gestern damit zu gebracht den Problemen auf die Schliche zu kommen.... zu 1.: Die Daten werden mit dem LSB zuerst übertragen. zu 2.: Da die Oszillatorfrequenz beim Empfang von 490kHz bei meiner Schaltung bei 489,6kHz liegt sind Mark und Space richtig. Keine Invertierung. Bei 518kHz dagegen liege ich mit 518,4kHz oberhalb. Daher sind Mark und Space vertauscht. Der Empfang und die Dekodierung funktioniert jetzt :-) Einzelne Zeichen sind mal fehlerhaft, das ist aber auch bei komerziellen Empfängern der Fall. Das nächst Abenteuer wartet schon: Wie speichere ich die "Datenmengen"? Ich stelle mir vor dafür eine SD Karte zu nutzen. Jede Meldung in eine Datei, die Meldungsnummer als Dateiname (z.B. DE23.txt). Das löst das Problem alte Meldungen zu löschen, die Meldungsnummer wird sich nach einiger Zeit wiederholen - so hoffe ich ;-) Einzig das String Handling macht mir noch Sorgen, da habe ich noch keine gute Idee. Der Empfang läuft in einer Interruptroutine. Das dekodierte Zeichen lege ich in ein globales Array (FIFO). In der Main, so meine Vorstellung, untersuche ich das Array auf vollständige Meldungen, diese werden im Array "aufbereitet" und der SD Karten Schreibfunktion übergeben. Preisfrage: Wie groß muß das Array sein? 4kB habe ich insgesammt an RAM. Derzeit sind davon 270 Byte statisch verbraucht. Die SD Kartenfunktionen werden sicher auch noch 300 Byte verbrauchen. Dann noch das alles was ich noch machen möchte :-o tippe so auf 1kB statischer RAM Verbrauch. Da sollten 3kB für den Stack doch reichen, oder? Viele Grüße, Dirk
@Dirk hier findest Du ein paar Infos zur Kodierung von NAVTEX: http://www.frisnit.com/navtex/?id=navtex_data_format Die Code-Tabelle hat Fehler. Die sind aber leicht zu finden wenn man die 4/3 Regel ansieht. Bin selbst dabei einen NAVTEX zusammenzubauen. Verwende einen modifizierten den Bausatz von http://www.box73.de/catalog/index.php?cPath=112_113_143&osCsid=gqk7lmfrj5ithdd1ggnn0m3so7 Der Empfang ist mit den max. 10 Min in 4 Std. recht selten und hier in Berlin ist von Pinneberg nur ganz selten mal die 490 zu empfangen. Am besten kommt Gislövshammar, Grimeton (bei Göteborg) und Rogaland (Norwegen) kommen auch öfters. Das mit dem Speicherplatz sollte so zu kritisch werden. Nach 3-4 Tagen kann man getrost löschen. Entweder eine Meldung wird erneut gesendet oder ist nicht mehr aktuell. Gruß Jürgen
Dirk schrieb: > Das nächst Abenteuer wartet schon: Wie speichere ich die "Datenmengen"? > Ich stelle mir vor dafür eine SD Karte zu nutzen. Jede Meldung in eine > Datei, die Meldungsnummer als Dateiname Bei meinem Empfänger schreibe ich keine konkreten Dateien auf die SD, sondern den dekodierten Datenstrom einer vollständig empfangenen Meldung. Sprich nur wenn der Header und die Endkennung richtig empfangen wurde. Das ganze wurde als Ringpuffer implementiert. Die Adressen für Start, Ende, letzte vollständige Meldung, aktuelle Position liegen dabei im uC. Das Auslesen der Daten erfolgt über eine TCP/IP-Verbindung. Bei einem Request wird der gesamte Ringpuffer in ein HTML-Format gebracht und an den Client übertragen. Praktisch ist der Empfänger also ein kleiner Webserver mit Radioempfänger.
Moin Dirk, den Empfänger kannst Du mittels der Phasendrehung am IQ-Mischer zwischen oberen und unteren Seitenband umschalten (müsste eigentlich sogar im Schaltplan der Frequenzaufbereitung irgendwo stehen; da müsste eine Brücke am 74xx86 sein...). Aber über Software geht's ja auch ;-) Wie hast Du das mit dem fehlenden Start-/Stopbit gelöst? Bei mir kommt da nur Gammel raus, weil mir immer die Syncronisierung wegläuft.
Hallo wird das 10 Sekunden Phasing Signal am Anfang der Aussendung ausgewertet? Wenn ich das richtig verstanden habe müsste dies ein 0FH 0001111B (Alpha) Zeichen sein. Habe noch eine weitere Dokumentation gefunden.
Hallo Dirk, ich bin bei meiner Suche auf diese Diskussion gestossen und moechte auch den NAVTEX Empfaenger von DL4BBL nachbauen. Gibt es die Firmware zum runterladen? Jede Hilfe ist sehr willkommen
@HAM die Synchronisation wird am Anfang und gelegentlich zwischen den einzelnen Meldungen gesendet, abwechselnd die Zeichen Alpha und Beta. Mittlerweile ist mein Empfänger (FA-Bausatz) aufgebaut. Es ist wirklich erstaunlich was diese einfache Schaltung empfängt. Da steht ein ICOM daneben, der empfängt auch nicht mehr! Eine der KW-Varianten auf 518 kHz umzustellen war völlig unkritisch. 2048 kHz Quarzgenerator und die Spule eines alten 455 kHz Filters im Vorkreis. Nun bleibt mir noch den Dekoder "IQ-tauglich" zu machen, Mit dem Piepsen am NF-Ausgang vom ICOM läuft der gut. Im Eingang ist eine Real-FFT als Filter. Reicht es aus, eine komplexe FFT zu verwenden? Hat jemand dazu gute Ideen? Jürgen
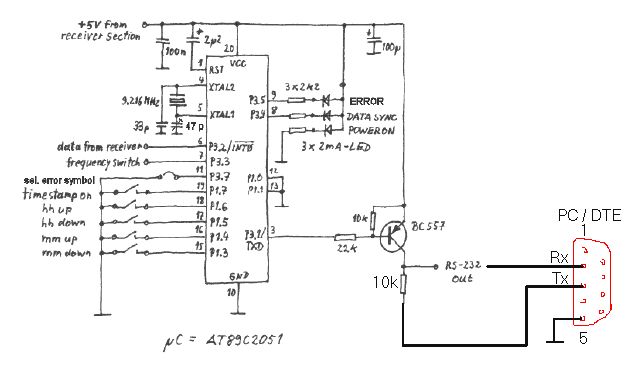
Hallo , ich möchte mir ebenfalls einen Navtex-Empfänger nach der Anleitung im ersten Post zu bauen. Dabei stellen sich mir folgende Fragen: -Wird an dem Ausgang nicht noch ein MAX232 benötigt? Ich verstehe die Schaltung so, dass der Ausgang nur zwischen +5V und 0V schwanken kann, nicht jedoch negativ werden kann. -Kann mir jemand das Programm für den µC senden? Speziell das Phasing und die Implementierung der Fehlerkorrektur würde mich interessieren. Vielen Dank, Daniel
Daniel H. schrieb: > Ich > verstehe die Schaltung so, dass der Ausgang nur zwischen +5V und 0V > schwanken kann, nicht jedoch negativ werden kann. Das ist für RS-232 out of spec, aber die meisten heutigen seriellen Schnittstellen an PCs akzeptieren einen derartigen Pegel, d. h. ein Pegel um 0 V herum ("verbotener" Bereich bei RS-232) wird dort wie ein negativer Pegel behandelt. Ein MAX232 negiert die Signale noch zusätzlich, denn die RS-232- Signale unterscheiden sich zwischen TTL und der eigentlichen Leitung nicht nur im Pegel, sondern auch in der Polarität.
Angehängte Dateien:
-

easy_rs232.gif
15 KB
{kind=link}
Hallo Daniel Dann machs doch so! Da die Datenübertragung nur von der CPU zum PC läuft, kann man sich die negative Versorgung einfach vom Tx des PCs holen. Die unbenutzte Tx-Leitung sollte auf ca. -10V liegen. @Jörg Der BC557 invertiert doch auch. Gruß, Bernd
Bernd schrieb: > Der BC557 invertiert doch auch. Den hatte ich noch nicht gesehen. Ich hatte in Bild 3 das "Data out to µC" als "Data out to PC" gelesen und daher gedacht, dass an dieser Stelle bereits die RS-232-Daten entstehen. (Hatte nicht versucht zu verstehen, was dort an welcher Stelle genau passiert.) Ja, der Transistor-Inverter ist dann einfach die Billigvariante dessen, was man sonst mit einem MAX232 machen würde.
Hallo, kann mir jemand auf die Sprünge helfen, wie das 490 bzw. 518 kHz Signal erzeugt wird? In "Fig 4. Oscillator Schematic" (Seite 7) der Bauanleitung: Die Umwandlung von 3,8684 MHz --> 115,2 kHz --> 28.8 kHz an Pin 4 des 74HC4046 ist soweit klar. Aber wie entsteht der Faktor 17 bzw. 18, damit an den Ausgängen A & B die 489,6 bzw. 518,4 kHz anliegen? Vielen Dank für Hinweise, Daniel
Der VCO im 4046 läuft auf einem Vielfachen der Referenzfrequenz. Der Chip ganz rechts ist ein umschaltbarer Teiler. Die Umschaltung kommt vom Controller.
Hallo zusammen, sorry, dass ich diesen alten thread rauskrame, habe mir die Schaltung mal angeschaut und möchte sie nachbauen. Im pdf zum Navtex receiver sieht man auf dem Gehäuse einen Kippschalter zum Umschalten der Empfangsfrequenz. Im Schaltplan selbst wird der Kippschalter nicht mehr angegeben. Wird dort per µC umgeschaltet? Die Signalleitung (HIGH 518kHz bzw. LOW 490 kHz)an P 3.3? Bin für eure Ideen dankbar. Vielleicht findet sich ja auch der ein oder andere der von seinen Empfangsqualitäten mit dem receiver berichten kann. Viele Grüße Andreas.
abeckz schrieb: > Die Signalleitung (HIGH 518kHz > bzw. LOW 490 kHz)an P 3.3? Jo, das sieht so aus. Bild 4 (Oszillator) zeigt ja, das das ein digitales Umschaltsignal ist und an den Vorteiler für den 4046 geht. Es kann übrigens nicht schaden, die Versorgung des Oszillatorteils nochmal anständig zu verdrosseln, um Störungen des HF-Teiles durch die Teilerkette zu vermeiden. Dazu kann auch beitragen, die beiden Baugruppen jeweils in ein kleines Blechgehäuse zu packen. Das Problem ist ja (deswegen auch die ursprüngliche Antennenfrage), das du praktisch nur mit verkürzten Antennen empfangen kannst, vor allem, wenn sie omnidirektional sein sollen. Da kommt also wenig Pegel an und jedes Quentchen weniger Störung erhöht die Empfindlichkeit. Wer kann auf seinem Boot schon einen passenden Langdraht aufspannen? :-)
:
Bearbeitet durch User
Hallo Matthias, vielen Dank für deine Antwort. > Jo, das sieht so aus. Bild 4 (Oszillator) zeigt ja, das das ein > digitales Umschaltsignal ist und an den Vorteiler für den 4046 geht. Gut zu wissen. Das würde ein weiteres Problem auf den Plan rufen: Wie dem µC mitteilen, dass er umschalten soll? Der Quelltext von Klaus Betke liegt in Assembler vor. Da kann ich leider gar nix rauslesen.... heul > Es kann übrigens nicht schaden, die Versorgung des Oszillatorteils > nochmal anständig zu verdrosseln, um Störungen des HF-Teiles durch die > Teilerkette zu vermeiden. Dazu kann auch beitragen, die beiden > Baugruppen jeweils in ein kleines Blechgehäuse zu packen. Wie würdest Du zusätzlich zu den Blechgehäusen entdrosseln? > Das Problem ist ja (deswegen auch die ursprüngliche Antennenfrage), das > du praktisch nur mit verkürzten Antennen empfangen kannst, vor allem, > wenn sie omnidirektional sein sollen. Da kommt also wenig Pegel an und > jedes Quentchen weniger Störung erhöht die Empfindlichkeit. Klaus Betke schrieb zur Antenne ja selbst "...usually an active system" Ich würde hier die pa0rdt mini-whip einsetzen. > Wer kann auf seinem Boot schon einen passenden Langdraht aufspannen? :-) Gar nicht unüblich nen Langdraht am Achterstag aufzuspannen. Gibt extra Besfestigungsmaterial dafür zu kaufen ;)
Andreas Beck schrieb: > Wie würdest Du zusätzlich zu den Blechgehäusen entdrosseln? Ver-, nicht entdrosseln :-) In die Versorgungsleitungen zum HF Teil sollten also HF-Drosseln und Abblockkondensatoren gegen Masse in Form z.B. eines Pi Filters. Am besten sind Durchführungskondensatoren, aber die sind nicht mehr einfach zu bekommen. Andreas Beck schrieb: > Gar nicht unüblich nen Langdraht am Achterstag aufzuspannen. Gibt extra > Besfestigungsmaterial dafür zu kaufen ;) Das schon - aber ein auf 518 kHz abgestimmter Langdraht (Dipol für 580m Wellenlänge) hätte ungefähr die Länge der Titanic, hehehe. Du wirst also schon mit verkürzter Antenne arbeiten müssen.
:
Bearbeitet durch User
Matthias Sch. schrieb: > Ver-, nicht entdrosseln :-) Ok. Danke. HF-Technik ist noch Neuland für mich. > Das schon - aber ein auf 518 kHz abgestimmter Langdraht (Dipol für 580m > Wellenlänge) hätte ungefähr die Länge der Titanic, hehehe. Du wirst also > schon mit verkürzter Antenne arbeiten müssen. Stimmt! Natürlich ein Bruchteil von Lambda. Sehe auch, Du kennst dich mit Booten aus..... ;-) (Aber nicht zufällig mit Assembler?!?!?!)
Ich wollte die Schaltung auch schon seit langer Zeit nachbauen, die Bauteile liegen aus Zeitmangel bzw. wegen anderer bevorzugten Projekten seit fast 2 Jahren unberührt in meiner Elektronikkiste. Mit dem Schaltplan habe ich mich jedoch häufiger auseinandergesetzt und auch einiges simuliert. Um die Lötarbeit zu vereinfachten würde ich das Mischen mit einem NE612 sowie als Tone Decoder einen XR2211 oder zwei LM567 verwenden. Oder gibt es in der Schaltung Vorteile gegenüber den integrierten Bauteilen? Zum (Assembler) Code kann ich leider nichts sagen, aber da ich das Programm auf einem modernen ATtiny ATmega Arduino inklusive Realtime clock laufen lassen möchte, wird der Code vermutlich stark überarbeitet oder neu geschrieben.
Daniel H. schrieb: > Oder gibt es in der Schaltung Vorteile gegenüber den integrierten > Bauteilen? Keine Ahnung. Ich werde sie die nächsten Wochen mal aufbauen und berichten wie es ausschaut. > > Zum (Assembler) Code kann ich leider nichts sagen, aber da ich das > Programm auf einem modernen ATtiny ATmega Arduino inklusive Realtime > clock laufen lassen möchte, wird der Code vermutlich stark überarbeitet > oder neu geschrieben. Da melde ich jetzt schon Interesse an :-) Gibt es eigentlich "anständigere" Module für den Arduino als die DS1307 rtc? DCF77 kann man mit dem Arduino auch gut decodieren.....
Andreas Beck schrieb: > Gibt es eigentlich "anständigere" Module für den Arduino als die DS1307 > rtc? DCF77 kann man mit dem Arduino auch gut decodieren Wenn du vorhast, das Teil auf deinem Boot zu verwenden, bietet sich eigentlich GPS an. Die Uhrzeit von GPS ist richtig genau (GPS lebt ja davon) und weltweit zu empfangen. Damit kannst du eine Uhr, die im Hintergrund im AVR läuft, prima synchronisieren - und die Position deines Bootes zu kennen, kann ja auch nicht schaden :-) Habe gerade in einem anderen Thread von einem 15 Euro GPS Modul gelesen: Beitrag "Re: Netzfrequenzmessung" (Ich rechne den Versand immer mit) Je nach Boot kannst du so ein Modul direkt in eine wasserfeste Maus einbauen und auf dem Kajütendach oder Mast unterbringen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.