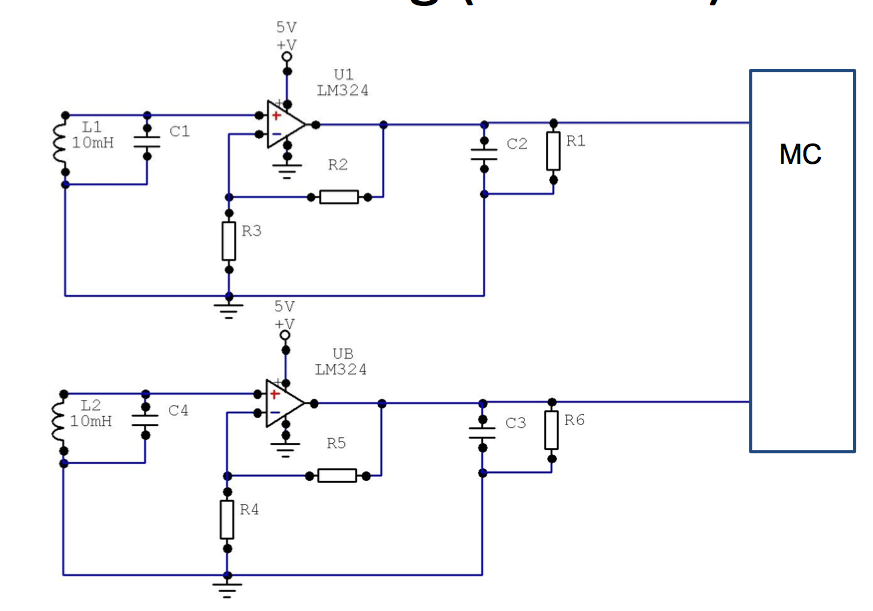
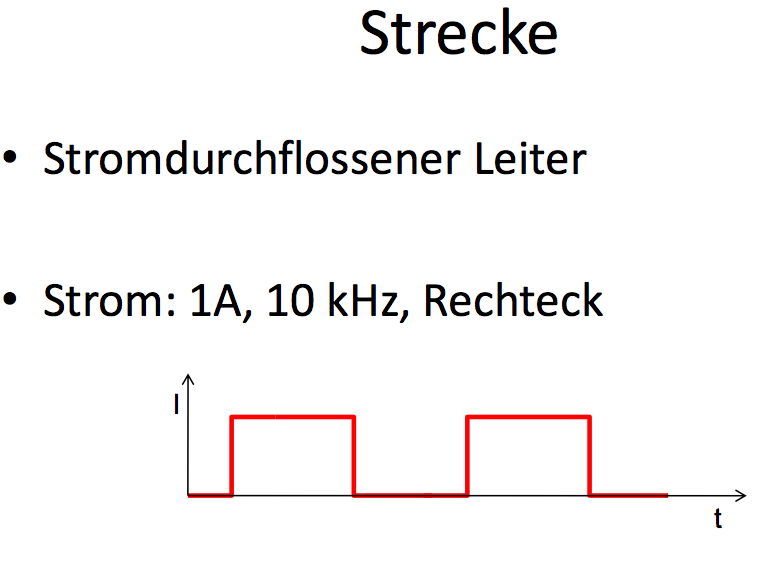

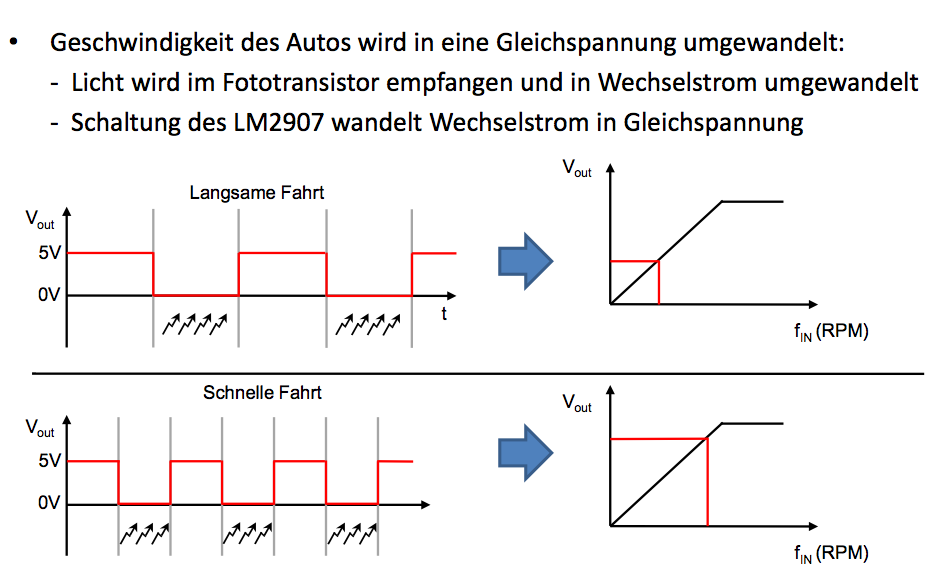
Hallöchen, ich bin ziemlich neu hier. Hatte den ersten Kontakt mit Euch hier über den Chat. Man sagte mir, man könnte mir ggf. hier im Forum weiterhelfen. Es geht um ein Projekt an der Uni. Wir sollen ein selbstfahrendes Modellauto bauen. Eine Strecke mit Kurven und Schlenkern ist vorgegeben. Das Fahrzeug soll 2 Runden fahren und am besten mit schnellen Rundenzeiten. Mit Hilfe eines selbstgebauten Sensors soll sich das Auto an einem Kabel mit 1A und 10kHz orientieren. Hab auch diesbzgl. einige Png Dateien hochgeladen im Anhang. Ein Servomotor für Lenkung ist vorgegeben. Wir sollen die Schaltungen auf Platinen realisieren. Dabei auch natürlich alle Größen selber wählen, ob wir nun eine 1k oder 10k Verstärkung des OP machen ist uns überlassen. Alles was vorgegeben ist, ist auch mit der dementsprechenden Größe auf der Skizze zu sehen, alles andere frei wählbar. Unsere Frage: Wir erwarten eine induzierte Spannung durch den LC-Schwingkreis am Eingang des OPs zwischen 100-500mV. Also eine ziemlich geringe. Damit wir eine deutlich messbare Größe am Ausgang des nicht invertierenden OPs haben, sollte eine min. 0,5k Verstärkung vorliegen. Jenachdem ob einer der beiden Spulen zu nah am Kabel ist, sollte auch eine größere Spannung hinten rauskommen. Wofür der RC teil am Ausgang ist wissen wir nicht genau, ob das als Filter dient, oder als pass - keine Ahnung. Wie groß sollten R1 und C2 sein? Wir haben errechnen können, dass der C1 ca. 25microFarrad sein sollte. Das nächste Problem wäre die Geschwindigkeitsmessung mit Hilfe eine Fototransistors: Da ist der Zeit unser Latein am Ende. Wir haben dort null ahnung. Wie gr0ß dort die einzelnen Bauteile sein sollen konnte wir uns nicht im Ansatz erdenken. Abgesehen davon wissen wir nicht wofür C1 C2 R1 und R2 dienen sollen. Wir sind dankbar für jede Hilfe. Lg,
Angehängte Dateien:
-

Sensorverschaltung.png
71 KB -

Strecke.png
21 KB -

f-U-Wandler.png
60 KB -

Geschwindigkeit.png
57 KB
studnet89 schrieb: > Wir erwarten eine induzierte Spannung durch den LC-Schwingkreis am > Eingang des OPs zwischen 100-500mV. Also eine ziemlich geringe. Das schon eine ziemlich hohe Spannung. studnet89 schrieb: > haben, sollte eine min. 0,5k Verstärkung vorliegen. Der mega32 hat zwei Eingänge mit 200 facher Verstärkung. Mit 2V Referenz seid ihr dann schon weit übers Ziel Hinaus. studnet89 schrieb: > Das nächste Problem wäre die Geschwindigkeitsmessung mit Hilfe eine > Fototransistors: Muss das so kompliziert sein??? Der Atmega hat mehrere Timer mit denen man sehr gut die Zeit messen kann. Den f-U Wandler würde ich nur nehmen wenn es unbedingt sein muss und wirklich nichts anderes erlaubt ist
Was studierst Du, techn. Chemie, Bauingenieurwesen, BWL...??? Erstsemester? Zum LM2907: Schon mal das Datenblatt angeschaut?
oh. Da wir keine Ahnung mit Modellbau haben, dachten wir wäre 0,5 V zu gering. ein schrieb: > Muss das so kompliziert sein??? Das sind die Vorgaben. Die Folien wurden uns zur Verfügung gestellt mit den jeweiligen Bauteilen. Wir können auch eigene Kreativität ins Spiel involvieren. Ganz erhlich, ich habe das mit der Geschwindigkeit nicht ganz verstanden.Warum verscuht man die Geschwindigkeit in Spannung auszudrücken? Wofür soll das dienen? ein schrieb: > Der Atmega hat mehrere Timer mit denen > man sehr gut die Zeit messen kann. Ich habe leider nie mit einem MC gearbeitet. Wie kann man denn die Timer dafür nutzen? Irgendwie muss ja ein Signal in den mega32
M. B. schrieb: > Was studierst Du, techn. Chemie, Bauingenieurwesen, BWL...??? > Erstsemester? Elektrotechnik, 4. Semester M. B. schrieb: > Schon mal das Datenblatt angeschaut? Nein, wird uns am Montag online gestellt. Haben es noch nicht gegoogelt. Sollten wir vielleicht mal tuen:) Wir haben erst am Donnerstag damit angefangen. Da wir sonst keinen großen Kontakt in der Gruppe haben (diese wurden Zufällig erstellt von der Hochshcule), haben wir uns beim ersten Treffen am Donnerstag bislang nur über die Sensorik nachgedacht.
Wie andere schon geschrieben haben: - verzichte, wenn möglich, auf die F/U-Konvertierung, unnötig. Lösung mit Timern, wie das geht, kannst hier im Wiki (links "Artikelübersicht") nachlesen. Ebenso wirst du es brauchen zur Ansteuerung des Servomotors. - Die verstärkte Wechselspannung der Sensoren/Schwingkreise direkt auf einen ADC-Pin geben? Naja, könnte klappen, aber wenn man schon einen 4fach-Opamp in der Schaltung hat, warum nicht gleich noch die Differenz beider Spannungen bilden und dann gleichrichten und DANN erst in einen ADC-Pin?
MB schrieb: > E-Technik 4.Semester... Das sollte zu denken geben danke für den Beitrag. Kann ich viel mit anfangen :-) Ich weiß nicht ob und wann Du studiert hast. Ich studiere nun mal nicht an der FH wo man wie in der Ausbildung/Schule viel praktisches lernt. Die Theorie sitzt einigermaßen. Aber Praxiserfahrung ist leider Null. Und eine Ausbildung als Radio-Fernsehtechnicker vor meinem Studium habe ich leider auch nicht gemacht.
ZufälligLesender schrieb: > Ebenso wirst du es brauchen zur Ansteuerung des Servomotors. Ok. Gut zu wissen. ZufälligLesender schrieb: > Die verstärkte Wechselspannung der Sensoren/Schwingkreise direkt auf > einen ADC-Pin geben? Naja, könnte klappen, aber wenn man schon einen > 4fach-Opamp in der Schaltung hat, warum nicht gleich noch die Differenz > beider Spannungen bilden und dann gleichrichten und DANN erst in einen > ADC-Pin? Hmm. Klingt logisch. Schlage ich mal am Montag den Jungs vor :-) Danke für die bislang sehr hilfreichen Beiträge.
studnet89 schrieb: > ZufälligLesender schrieb: > >> Die verstärkte Wechselspannung der Sensoren/Schwingkreise direkt auf > >> einen ADC-Pin geben? Naja, könnte klappen, aber wenn man schon einen > >> 4fach-Opamp in der Schaltung hat, warum nicht gleich noch die Differenz > >> beider Spannungen bilden und dann gleichrichten und DANN erst in einen > >> ADC-Pin? > > > > Hmm. Klingt logisch. Schlage ich mal am Montag den Jungs vor :-) Das ist dann aber am Lernziel vorbei, gelle... Die Aufgabenstellung lautet doch "Umsetzen unter den Vorgaben". Natürlich lässt sich das einfacher lösen. Wieviele SWS sind denn für Projekt vorgesehen? Ist die Mechanik (Auto) schon fertig?
M. B. schrieb: > Wieviele SWS sind denn für Projekt vorgesehen? Ist die Mechanik (Auto) > schon fertig? 3 SWS. Damit kommen wir natürlich nicht vorne und hinten klar. Am ersten Tag haben wir 5Std gebraucht um überhaupt eine OP Schaltung auf einer Platine zu realisieren. Keiner von uns hatte bislang jemals einen Lötkolben in der Hand gehalten gehabt^^. Dementsprechend mussten wir ständig unsaubere Lötstellen korrigieren bis es funktioniert hat. Die Mechanik ist insoweit fertig, dass die Umsetzung auf die Räder schon vorhanden ist. Soweit ich informiert bin, haben wir ein vorgegebenen Elektromotor Speed Machine 540 (soll ein Standard im Modellbau sein) und ein Servomotor RC-Motor Servo 4519 BB (ebenfalls ein Standard für Modellbau).
Die Op's haben dc mäßig am Eingang nen satten Kurzschluss . Hat das so jemals funktioniert ????
Ohm schrieb: > Die Op's haben dc mäßig am Eingang nen satten Kurzschluss . > > Hat das so jemals funktioniert ???? Wo soll denn da Kurzschluß vorliegen?
Ohm schrieb: > Die Op's haben dc mäßig am Eingang nen satten Kurzschluss . Natürlich nicht. Es ist nur so, dass die negative Halbwelle am Spulenausgang unter dem Potential der negativen Versorgungsspannung der OPAmps (=Masse) liegt und damit wohl gleichzeitig einen einfache Einweggleichrichtung gemacht wird (weil der Opamp eben nichts verstärken kann, was unterhalb der nagativen Versorgungsspannung liegt). Das erklärt dann auch C2/R1 am Ausgang: C2 bildet mit der Ausgangsimpedanz des Opamps (die bei einem Uralt-324 sicherlich recht hoch ist) einen Tiefpass, R1 soll den Kondensator wieder entladen, wenn kein Signal kommt. Dadurch hat man einen simplen Hüllkurvendetektor.
studnet89, nachdem was ich eben geschrieben habe, kommt aus der Schaltung direkt eine dem Feld (bzw. der Nähe der Spulen zum Kabel) proportionale Gleichspannung raus, die kannst du direkt auf je einen ADC-Pin des AVRs geben. Wie man vom ADC einliest ist auch hier in der Artikelsammlung beschrieben: http://www.mikrocontroller.net/articles/AVR-Tutorial:_ADC http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial#ADC_.28Analog_Digital_Converter.29 Das Servo, welches du genannt hast, ist ein stinknormales mit dem üblichen Eingang (Steuerung durch Pulsbreite). Es kann also direkt an einen Portpin gehängt werden. http://www.mikrocontroller.net/articles/Modellbauservo_Ansteuerung Weitere Codeschnipsel zur Servoansteuerung findest du auch hier sicherlich durch die Suche. Für den Motor, das ist ein ganz normaler Gleichstrommotor, brauchst du vielleicht noch einen Treibertransistor, am einfachsten einen logik-level-mosfet. Ansteuerung des Motors auch per PWM: http://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM
ZufälligLesender schrieb: > R1 soll den Kondensator wieder entladen, wenn kein Signal > kommt. Ist natürlich Schwachsinn, solange zwischen dem Kondensator und dem Ausgang des OPamps keine Diode liegt, wird der Kondensator ganz normal durch den Opamp entladen. R1 ist einfach nur eine zusätzliche, evtl. unnötige Last. Wird aber trotzdem leidlich funktionieren.
ZufälligLesender schrieb: > ZufälligLesender schrieb: >> R1 soll den Kondensator wieder entladen, wenn kein Signal >> kommt. > Ist natürlich Schwachsinn, solange zwischen dem Kondensator und dem > Ausgang des OPamps keine Diode liegt, wird der Kondensator ganz normal > durch den Opamp entladen. R1 ist einfach nur eine zusätzliche, evtl. > unnötige Last. Wird aber trotzdem leidlich funktionieren. das sind ja prima Informationen. Vielen rechtherzlich Dank. Wie groß sollten wir im Idealfall den Kondensator und Wiederstand am Ausgang wählen? Sollten wir den Kondensator klein wählen, damit die Entladung durch den OP nicht allzulange dauert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.