Einen wunderschönen Guten Morgen!
Ich hätte hier mal ein klitzekleines Problemchen.
An einem Verbr.motor nutze ich für die Drehzahl sowie die
Winkelbestimmung den INT0 eines ATMega88. Um zu bestimmten Zeitpunkten
die Kolbenpositionen bestimmen zu können werden der INT1 sowie drei
weitere PCINTs die mit Hallsensoren verbunden sind genutzt.
Jetzt habe ich das Problem, dass gerade die 3 Zylinder die mit den
PCINTs verbunden sind bei bestimmten Drehzahlen einfach Sprünge
aufweisen, d.h. ohne erkennbaren Grund 12° Kurbelwinkel zuviel anzeigen.
Der Zylinder der mit INT1 verbunden ist macht das nicht.
Ich bin mir momentan nicht ganz sicher ob das an den Interrupts liegt
oder doch ein anderes Problem sein kann.
Ich lasse für die PCINTs nur ein gewisses Zeitfenster zu, so dass nur im
Falle einer fallenden Flanke in der ISR etwas berechnet wird.
Weiterhin habe ich auch schon versucht, direkt in der betreffenden ISR
das entsprechende Bit im PCICR-Register und im PCIFR zu löschen und es
nach einer gewissen Zeit in der Mainschleife zu setzen, hat aber auch
nicht funktioniert (ich dachte, dass die PCINTs vielleicht mehrfach
direkt nacheinander aufgerufen werden).
Hat hier vielleicht irgendjemand Rat?
Hier nochmal der Code:
>Mir sind diese "Fischlein" schon bekannt. Aber selbst ein>Bundespräsident ist höflich! Und dass MaWin hier öfters mal mit Leuten>durch seine unhöfliche Art aneinander gerät ist glaube ich auch jedem>bekannt der schon mehr als 2 Themen durchgelesen hat ;-)
-kann es sein das die Drehzahl zu hoch ist, so dass die ISR nicht
komplett abgearbeitet werden kann, bevor die nächste aufgerufen wird ?
-Max U/min?
-F_CPU?
gruß jonas
Sorry copy&paste fehler im letzen post !
So richtig:
>Jetzt habe ich das Problem, dass gerade die 3 Zylinder die mit den>PCINTs verbunden sind bei bestimmten Drehzahlen einfach Sprünge>aufweisen, d.h. ohne erkennbaren Grund 12° Kurbelwinkel zuviel anzeigen.
-kann es sein das die Drehzahl zu hoch ist, so dass die ISR nicht
komplett abgearbeitet werden kann, bevor die nächste aufgerufen wird ?
-Max U/min?
-F_CPU?
gruß jonas
jonas biensack schrieb:> -kann es sein das die Drehzahl zu hoch ist, so dass die ISR nicht> komplett abgearbeitet werden kann, bevor die nächste aufgerufen wird ?
Da würde wohl eher der Motor auseinanderfliegen.
Selbst bei 12000 U/min wären noch 5 ms Zeit
>Da würde wohl eher der Motor auseinanderfliegen.>Selbst bei 12000 U/min wären noch 5 ms Zeit
mh...stimmt ich war irgendwie bei U / sec aber selbst dass würde ja noch
gehen...
>Ich lasse für die PCINTs nur ein gewisses Zeitfenster zu, so dass nur im>Falle einer fallenden Flanke in der ISR etwas berechnet wird.
Das interesiert mich mal, du schaltest sie also mit sei() und cli() an
und aus oder wie?
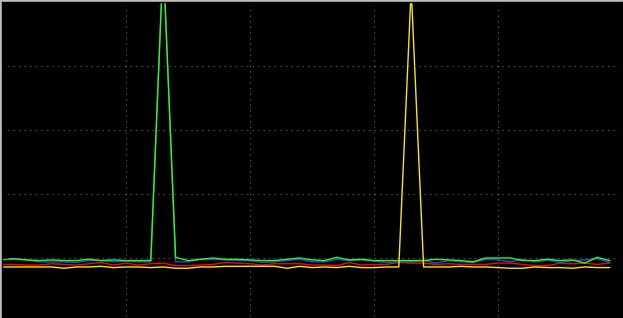
Komischerweise tritt es nur bei gewissen Drehzahlen auf. Ich habe mir
auch schon überlegt, ob das evtl. irgendwelche Resonanzfrequenzen sind
und daher die Sensoren Quatsch machen. Werde gleich mal das Oszilloskop
bemühen...
if ( (phi < 46) && (phi > 39) ) <-- Das habe ich auch schon probiert,
Macht aber keinen Unterschied.
Mit dem Zeifenster meinte ich das Kurbelwinkelfenster. Ich weiß dass die
Magneten innerhalb dessen in den Auslösebereich der Hallsensoren sind,
aber nicht wieder aus dem Bereich austreten.
Das passiert erst nach dem angegebenen Kurbelwinkelbereich.
>if ( (phi < 46) && (phi > 39) ) <-- Das habe ich auch schon probiert,
Ist aber einfach besserer und schönerer Stil, denn du vergleichst ja
zwei Ausdrücke ob sie wahr sind, und verknüpst nicht zwei Ausdrücke
binär mit einer Undverknüpfung...oder?
Meinst du?
Wobei meine Frequenzen sind ja nicht wirklich hoch!
Stutzig macht mich nach wie vor, dass Zylinder 1, der mit dem Int1
zusammenarbeitet, diese Fehler nicht verursacht. Bis jetzt zumindest.
Da muss doch irgendein Zusammenhang sein?!
So, dann mach mal folgendes: Tausche mal Zylinder 1 ISR und Zylinder 3
ISR und schaue ob der Fehler immer noch auftritt - dann können wir sagen
ist ein Software Problem :)
Das wäre doch schon mal ein Schritt weiter...
Alois schrieb:> Ich lasse für die PCINTs nur ein gewisses Zeitfenster zu, so dass nur im> Falle einer fallenden Flanke in der ISR etwas berechnet wird.
Dann aber direkt vor der erneuten Freigabe das Interruptflag löschen
(also setzen)!
Peter
>Dann aber direkt vor der erneuten Freigabe das Interruptflag löschen>(also setzen)!>>Das interesiert mich mal, du schaltest sie also mit sei() und cli() an>>und aus oder wie?
Genau in die Richtung habe ich auch gedacht.
Also ich habe jetzt noch mal die Steuerleitungen zu den Interrupts
vertauscht.
Das Ganze tritt nur bei den PCINTs auf der INT1 des ersten Zylinders
funktionert tadellos.
Mit dem Oszilloskop kann ich bis jetzt auch nichts gravierendes
erkennen.
Das mit dem Interruptflag probiere ich jetzt noch aus. Momentan verstehe
ich nicht ganz den Zusammenhang warum ich eine 1 in das PCIFR* eintragen
muss, damit es gelöscht wird, ich dachte wenn ein Interrupt am Pin
ausgelöst wird, dann steht da auch eine 1 drin?
Grüße
Ich habe jetzt noch einmal einiges an Zeit investiert, aber das Problem
nicht wirklich wegbekommen.
Ich habe aber auch ein Problem im AVR-Simulator. Und zwar wenn ich
innerhalb des PCIF-Registers die Flags während einer Simulation setze,
dann funktionieren die ISRs für PCINT1_vect und PCINT2_vect aber mein
Interrupt an PB0, also PCINT0_vect wird bei Setzen des PCF0 Flags nicht
angesprungen.
Und wenn ich PINC Bit5 also meinen deklarierter Pin für den PCINT1_vect
während der Simulation auf 1 setze, dann wird die ISR angesprungen, aber
nicht mehr verlassen weil das PCIF1 weder vom Programm noch von Hand
gelöscht werden kann. Nur wenn PINC Bit5 von Hand wieder auf 0 gesetzt
wird, wird die ISR verlassen.
Ist das ein AVR-Simulatorproblem oder liegt das an mir?
Grüße,
Alois
Naja, ich brauche ja genau 5 Interrupts, deshalb bot sich ja der ATmega
an, wegen den zwei externen und den 3 PCINTvektoren.
Momentan löse ich es ja so, dass ich die Werte vergleiche und dabei die
fehlerhaften "rausfiltere".
Grundsätzlich wäre es auch eine Option auf den ATmega64 zu wechseln
Ich würde aber halt gerne wissen, wo hier das Problem liegt. Vielleicht
hatte ja schon mal jemand ein ähnliches Verhalten. Oder ich mache
irgendeinen grundätzlichen Fehler.
Alois schrieb:> Naja, ich brauche ja genau 5 Interrupts, deshalb bot sich ja der ATmega> an, wegen den zwei externen und den 3 PCINTvektoren.
Wenn du also die von mir vorgeschlagenen unkastrierten Int´s nimmst
hast du schon 4 Stück.
als 5ten nimmst du dann noch Pin Change , musst aber nicht mehr
auswerten,
welcher Pin das tat.
Zudem hast du ja kenntnis über deinen Motor.
Das verschafft dir einen starken Vorteil gegenüber der maschine.
Es ist auch unwarscheinlich m dass der erste Kolben oben ist,
wenn der vierte auch oben ist. ... Dann wäre ja die Maschine kaputt.
Zudem gibt es auch immer noch AND und NAND Gates.
Es gibt auch 7474 flankengetriggerte D-Flip Flop
und es gibt Schieberegister.
Überleg mal genau !
Klaus