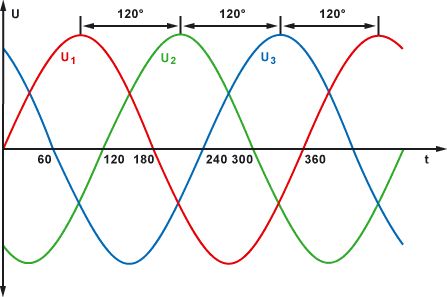
Hallo Leute, ich habe einen BLDC Motor mit 3 eingebaute analoge Hall Sensoren am Stator. Bei drehen des Motors bekomme ich von den drei Hall Sensoren, drei Sinussignale die um 120° verschoben sind. Gibt es nun eine Möglichkeit den elektrischen Winkel des Motors mathematisch durch die drei Signale der Sensoren zu bestimmen ? Gedacht habe ich an die Clark Transformation, aber irgendwie bekomme ich komische werte dabei. Ich hoffe ihr könnt mir dabei weiterhelfen. Danke
Daniel schrieb: > Gedacht habe ich an die Clark Transformation, aber irgendwie bekomme ich > komische werte dabei. Die Komponenten I_a und I_b, die aus der vereinfachten Clarktransformation herauskommen, liegen wunderschön auf einem Kreis. Die Vereinfachung ergibt sich dadurch, dass die Summe der 3 Eingangskomponenten gleich Null ist. Wahrscheinlich machst du bei deiner Rechnung irgendwo einen Fehler oder hast eine Größe falsch eingesetzt ;-)
Angehängte Dateien:
-

10060611.gif
8,7 KB
{kind=link}
Ich habe jetzt mal folgende Rechnung angestellt: Skizze: U1=ia,U2=ib,U3=ic Für den Zustand 90° ergibt sich bei den Sinussignalen: ia=1; ib=-0.5 ;ic=-0.5 i_alpha=2/3*ia-1/3(ib-ic) i_beta=2/sqrt(3)*(ib-ic) Ergibt: i_alpha=2/3 ,i_beta=0 Bei 90° sollten die Ergebnisse vertausch sein ? Die Formel habe ich aus einer Formelsammlung.
Ich hatte die vereinfachte Form verwendet: i_alpha = i_u i_beta = 1/srt(3) [ i_u - 2 i_v] Dabei wird zur Vereinfachung i_u + i_v + i_w = 0 hineingesteckt. Quelle: http://de.wikipedia.org/wiki/Clarke-Transformation Für die Auswertung einer realen Messung ist die längere Form, die alle drei Meßwerte berücksichtigt, günstiger.
Wie kann ich nun aus den Werten alpha und beta den aktuellen Winkel meiner eletrischen Rotorposition bestimmen ? durch trigonometrische funktionen ergibt sich eine division durch null und ist unzulässig. Ich brauche also den Winkel zwischen alpha und der resultierenden (gebildet aus alpha und beta).
Hallo, ich habe mich auch gerade mit dem Thema beschäftigt. Das was du suchst, ist die Transformation der Karthesischen Koordinaten in Polarkoordinaten: http://de.wikipedia.org/wiki/Polarkoordinaten#Umrechnung_von_kartesischen_Koordinaten_in_Polarkoordinaten Grüße, leomar01
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.