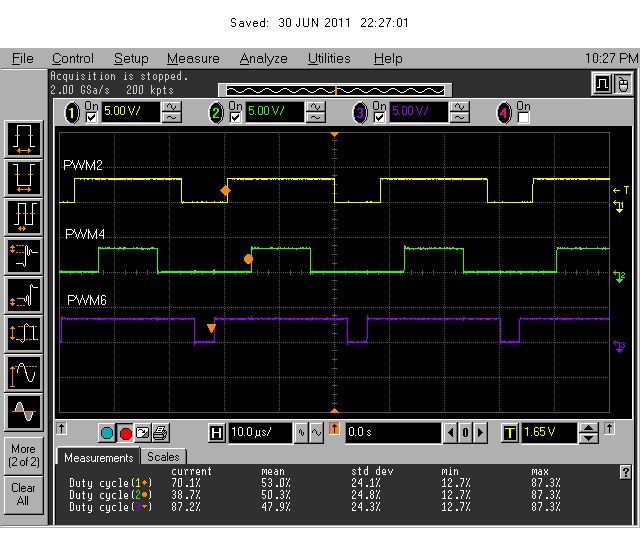
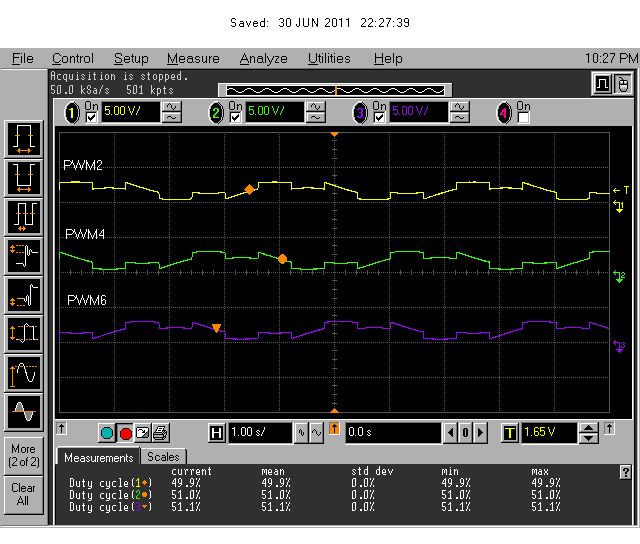
Hallo, ich möchte gerne eine Raumzeigermodulation implementieren, damit ich nachher mittels FOC einen Motor ansteuern (und Regeln) kann. Nun muss ich natürlich auch eine Raumzeigermodulation machen können, dieser gebe ich die gewünschten Spannungen für den Motor an, so wie es der FOC-Algorithmus berechnet, und die RZM soll dann das PWM-Modul meines Mikrocontrollers ausnutzen, um dann die Leistungsstufe anzusteuern. Soweit so gut. Ich habe nun auch schon ein Buch darüber beschafft, "Leistungselektronik Grundkurs", dort wird einigermassen anschaulich erklärt, wie eine solche Raumzeigermodulation zu funktionieren hat. Auch den Code, den es in einem entsprechenden Artikel hier gibt, habe ich gelesen und im Prinzip verstanden. Nun möchte ich das Umsetzen. Das PWM-Modul meines verwendeten Mikrocontrollers erlaubt es, die ein- und ausschaltzeitpunkte für jedes PWM-Signal selber vorzugeben. Das ist ja sehr praktisch, so kann ich nämlich die Bitmuster, genau so wie sie im genannten Projekt hier beschrieben sind, einprogrammieren, mit einer Sinustabelle die Schaltzeitpunkte bestimmen, fertig. Sollte man meinen! Im Bild PWM.gif seht ihr die entstehenden PWM-Signale. Soweit ich das beurteilen kann, sehen die so schon mal nicht so schlecht aus, oder? Da ich zu Hause leider kein Oszi habe, bin ich heute nach Feierabend extra länger in der Firma geblieben und hab da schnell die Signale gemessen. Und natürlich die Leistungsstufe zu Hause vergessen! Um zu testen, ob die PWM brauchbar ist, habe ich deshalb RC-Glieder angeschlossen, die die Spannung dann mitteln sollen. Dann sollte ja eigentlich ein sinusförmiges Signal raus kommen, oder? Was aber effektiv raus kommt, seht ihr im Bild rc.gif. Könnt ihr mir weiter helfen, was ich falsch mache?
Peter schrieb: > Um zu testen, ob > die PWM brauchbar ist, habe ich deshalb RC-Glieder angeschlossen, die > die Spannung dann mitteln sollen. Dann sollte ja eigentlich ein > sinusförmiges Signal raus kommen, oder hmm ich weiss nicht ob ich so ganz verstanden habe was du machen willst, aber wieso sollte die gemittelte PWM (auf dem Bild) ein Sinus ergeben ? Das Signal was da raus kommt sieht für mich aus wie ne Rechteckfunktion mit einer festen Frequenz (zu mindest in dem Ausschnitt) damit da nen Sinus rauskommt muss die Pulsbreite varriert werden (siehe http://de.wikipedia.org/wiki/Pulsweitenmodulation) Das RC glied dient zur zeit nur zur Mittelung und wenn du das was du hast hast mittelst über ne gewisse Zeit kommt so was raus wie auf deinem RC Bild. hoffe das bringt dich deiner Lösung näher. Gruß Lutz
Moin, Was willst du der RZM übergeben? Winkel und Länge des Zeigers? Dann musst du die 6 Sektoren unterscheiden. In jedem Sektor kannst du in einer LUT mit den Sinuswerten von 0-60° den Dutycicyle der beiden Spannungsvektoren bestimmen die den Sektor begrenzen. Damit hast du den Winkel. Dann musst du den Betrag/die Länge des Zeigers bauen. Das bedeutet du nimmst dir den 0-Vektor der am wenigsten Umschaltungen der Phasen verlangt. also 111 oder 000. wenn deine RZM nur 50% Spannung rausgeben soll dann ist zu 50% der 0-Zeiger an, und die Restlichen 50% bleiben für die vorher berechnete Zeiger kombination. Das mal zum Grundsätzlichen Ablauf. Auf was für einem ARM willst du das machen? Was für Motoren willst du Regeln? MfG Tec
Sowas mit einer ohmschen oder ohmsch-kapazitiven Last zu "simulieren" ist ungünstig, weil es überhaupt nicht dem Anwendungsfall entspricht. Im Allgemeinen sehen die Kurven gar nicht schlecht aus. Häng doch mal eine Drossel an die Ausgänge. Der Motor ist ja sowas ähnliches. Das müßte besser funktionieren... Gruß
Joachim schrieb: > Sowas mit einer ohmschen oder ohmsch-kapazitiven Last zu "simulieren" > ist ungünstig, weil es überhaupt nicht dem Anwendungsfall entspricht. Wenn ich den TO richtig verstanden hab, ist die Leistungsstufe hier gar nicht im Spiel. Der Ansatz mit dem Tiefpass ist also ok. Was man aber sieht, ist daß die PWM Frequenz im Verhältniss zu Frequenz des Sinus viel zu niedrig ist. Wie stark sich das auf die Laufruhe und das Drehmomentripple des Motors auswirkt, kann man so nicht beurteilen. MfG Klaus
Hallo Peter, sieht doch OK aus! :) RZM verschiebt den Neutralpunkt des Motors ... vermutlich sind deine 3 Signale alle gegen GND gemessen? Meß doch mal von Phase nach Phase (bzw. laß das Oszi die Differenz zwischen 2 der aufgezeichneten Signal rechnen). Das sollte das gewünscht Signal bringen ... Gruß, Rolf
Hallo, die Signale sehen doch im Prinzip gut aus. Mit ein wenig Phantasie erkennt man die drei Sinussignale, die, von oben nach unten als U, V, W betrachtet, die typischen Kurven am Motor zeigen. Dieser Motor dreht rückwärts ! Gruss Hans
Angehängte Dateien:
-

pwm_signale.GIF
27 KB -

mittelwerte.GIF
30 KB
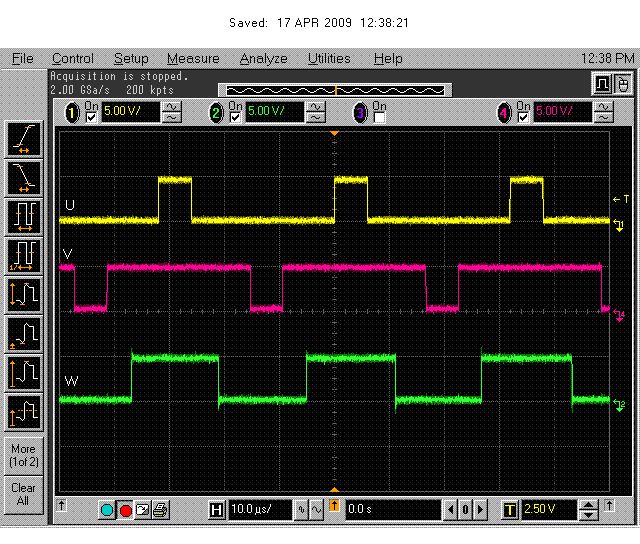
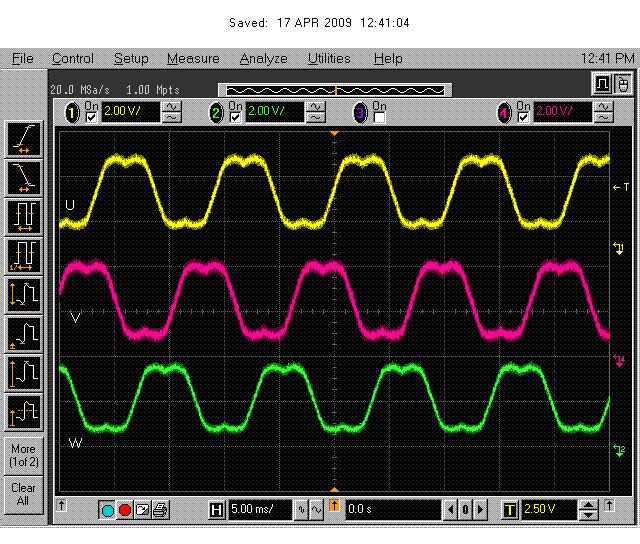
Hallo Leute, sorry dass ich mich so spät erst melde. Mein Router zu Hause ist abgeraucht, und ich musste mir jetzt erst Ersatz beschaffen! :-/ Ich muss vielleicht erwähnen, dass ich die Raumzeigermodulation bereits einmal implementiert habe. Leider ist das schon ein paar Jahre her, aber ich habe dazu leider überhaupt keine Unterlagen mehr, ausserdem war es sowieso auf einem völlig anderen Prozessor und ich könnte das wahrscheinlich sowieso nicht adaptieren, da die Hardware hier wirklich grundsätzlich anders ist. Aber ihr seht auf dem ersten Bild, pwm_signale.gif, die PWMs, wie sie damals mein Mikrocontroller generiert hatte. Der Tastgrad verstellt sich kontinuierlich, genau gemäss dem Algorithmus, der im Artikel hier beschrieben wird. Mittelt man das mit einem RC-Glied, dann kommen die mittelwerte.gif zum Vorschein - und GENAU SO sollen die auch sein! oder? Der Motor damals drehte 1a, und der Strom war nahezu perfekt sinusförmig. Der Controller, auf dem ich das jetzt implementieren möchte, ist ein LPC2478. Wie ihr erkennt, beträgt die PWM-Frequenz 72kHz, den Tastgrad verändere ich mittels Interrupt mal Testweise alle 5 ms. Da sollte also ein schöner Sinus raus kommen, tut er aber nicht! Folgendes, im Artikel hier ist die Einschaltzeit der verschiedenen Vektoren wie folgt angegeben: Im Sektor 1 wird zuerst der Nullvektor 000 geschaltet, während der Zeit t0 / 2. Anschliessend kommt der Vektor 001, während der Zeit t1, dann kommt der Vektor 011 während der Zeit t2, dann wieder 001 für die Dauer t1 und dann nochmal 000 während t0 / 2. Die Zeiten berechnet man mit t1 = sin(60 - omega), t2 = sin(omega), t0 = T - t1 - t2, wobei T die Periodendauer meiner gewünschten PWM ist. Soweit so gut! Doch was mache ich denn dann im 2. Sektor? Dort lautet die Schaltreihenfolge ja: 111 011 010 000 010 011 111 Der Grenzübergang vom Sektor 1 zum Sektor 2 könnte also das Problem sein, denn beim "Verlassen" von Sektor 1 muss ja der Nullvektor 000 geschaltet werden, beim "Eintritt" in Sektor 2 aber der Nullvektor 111! Das muss ja ein gruseliges Signal geben, oder nicht? Damals hatte ich es auch so gemacht, dass ich mit Excel vorgängig alle PWM-Werte berechnet hatte. Nun habe ich aber einen so dicken Prozessor, der soll das selber direkt rechnen, also auch mit Sinus (den kann man ja gut aus einer Tabelle ableiten, man braucht ihn ja nur im Bereich 0..60°). Wo kann ich nochmal die Motorspannung einfliessen lassen? Irgendwie stochere ich grade im Nebel, schade habe ich den alten Sourcecode nicht aufbewahrt. Was ich mit der RZM machen möchte: wie ich erwähnte, möchte ich mittels einer FOC einen Motor drehen lassen - zuerst einen kleinen Brushless-Motor, danach einen etwas grösseren Servomotor aus einer ausgedienten CNC-Maschine. Die passenden Leistungsstufen habe ich bereits bauen können und die Funktionieren gut. Der FOC-Algorithmus berechnet mir ja zu jedem Zeitpunkt die Spannungen, die an den drei Motorphasen anliegen sollen. Das soll also der Input meiner Raumzeigermodulation sein. Raus kommen sollen dann die PWM-Werte. Und wie gesagt, muss ich im PWM-Modul des verwendeten Mikrocontrollers die ein- und ausschaltzeitpunkte beide manuell vorgeben, deshalb wäre eine Formel schön, die diese direkt berechnet.
Peter schrieb: > Da sollte also > ein schöner Sinus raus kommen, tut er aber nicht! ... tut er doch!!! Nochmal: schau Dir die Differenz zweier deiner Signale (z.B. U-V, V-W oder W-U) an und du siehst den gewünschten Sinus! ... und das ist geneu der Sinus, den auch der Motor "sieht". Die gezeigten Signale sind gegen GND gemessen und nicht gegen den Neutralpunkt des Motors. Die RZM hebt und senkt den Neutral-/Sternpunkt des Motors, um etwas größere Amplituden im z.V. stehenden DC-Spannungsbereich realisieren zu können (im Vergleich mit einer einfachen Sinus-Modulation). Du hast schon alles richtig gemacht! Schließ den Motor an und er wird wie gewünscht drehen. :) Gruß, Rolf
Warum kommen denn jetzt nicht mehr diese schönen Sinuskurven raus, die man in meinem letzt Post sieht? Das ist irgendwie komisch.
@ Peter Meinst Du, weil jetzt diese "Pobacken" da sind ? Das ist ganz richtig.
Die "Pobacken" sind eben nicht da! Aber so müssen die Signale aussehen, oder? Das ist ja gerade mein Problem: Ich berechne die Schaltzeiten genau so wie http://www.mikrocontroller.net/articles/Frequenzumrichter_mit_Raumzeigermodulation hier, jedoch kommt da dieser zerhackte Mist raus, und eben NICHT die Pobacken :-/
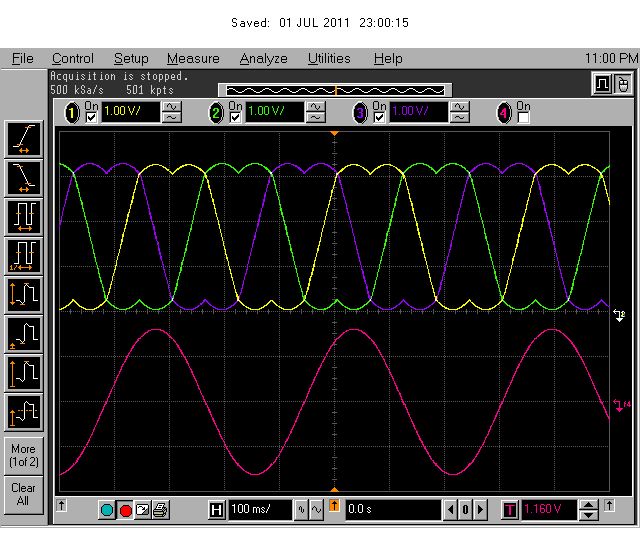
Hey Leute, ich kann endlich Entwarnung geben: Angehängtes PDF hat mein Problem endlich gelöst! (S. 5, 10) Yes, nun geht es endlich, und ich sehe diese schönen "Supersinus"-Kurven auf meinem Oszi. Und messe ich die Differenz ZWISCHEN ZWEI solchen Kurven - na, ratet mal wie die aussieht ;-) Natürlich schön sinusförmig. Perfekt! Nun kann ich fortfahren mit meiner FOC. Für die Raumzeigermodulation benötige ich ja den aktuellen Winkel des Rotors, um den Sektor bestimmen zu können und um dann die entsprechenden PWM-Timings berechnen zu können. Soweit so gut, die Rotorposition muss ich für die FOC eh erfassen mittels Drehgeber. Aber aus dem PI-Regler, den ich mit der FOC auch implementieren muss, kommen ja dann die Spannungen Ualpha, Ubeta raus - diese werden ins 3phasen-System transformiert, sodass ich Uu, Uv, Uw kriege. Und anhand dieser soll dann wieder die Raumzeigermodulation eingestellt werden. Frage: wie mache ich das denn? Für diese RZM hier benötige ich ja nur den Umlaufwinkel. Wo fliesst da die Spannung in der Berechnung ein?
Angehängte Dateien:
-

raumzeigermodulation.gif
21 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
So sehen meine Signale jetzt aus. Gelb, grün und Violett sind die mittels RC gemittelten PWMs, rosa ist die Differenz von gelb und grün. Scheint einigermassen brauchbar zu sein, oder?
Hallo Peter, bei der FOC liefern Dir die beiden Stromregler zunächst die beiden Spannungen Ud (Flussregler) und Uq (Drehmomentregler) im rotororientierten System. Diese beiden Spannungen werden dann mittels der aktuellen Rotorlage nach Ualpha und Ubeta im statororientierten System. Diese beiden Spannungen kannst Du dann direkt als Einganssignale für die RZM verwenden. Alternativ kannst Du die beiden Einzelkomponenten Ualpha und Ubeta auch in Betrag und Phase umrechnen und dann in die RZM gehen. Die Berechnungen sind dann etwas unterschiedlich. Die Spannungshöhe kommt also damit direkt aus den Komponenten heraus die dir deine Regler liefern. Bei der Darstellung Betrag/Phase steckt die Spannungshöhe im Betrag. In der RZM spiegelt sich die Amplitude der Ausgangsspannung in den Nullzeigern (000 oder 111) wieder. Je länger die Nullzeiger sind desto kleiner ist die Amplitude der Ausgangsspannung. Wie berechnest Du denn derzeit deine RZM? Viele Grüße, Ralf
Hallo Ralf, Da ich ja noch keine FOC implementiert habe, sondern erst mal diese RZM mache ich es wie folgt: Ich nehme den Winkel Omega, der den Umlaufwinkel des Rotors darstellt. Diesen zähle ich mit einem Timer hoch, z.B. alle 2 ms oder so. Sobald Omega 360° erreicht hat, wird er wieder auf 0° gesetzt. Im Timerinterrupt wird dann, genau wie im Artikel hier im Wiki, anhand einer Sinustabelle die Einschaltzeit für die PWM berechnet und eingestellt, natürlich unter beachtung des aktuellen Sektors, in dem sich Omega gerade befindet. Eine Asynchronmaschine, die dann angeschlossen wird, dreht auch erwartungsgemäss, auch die Stromverläufe sind sinusförmig. Wenn ich jetzt aber eine FOC implementiere, dann muss ich das ja anders machen. Als Eingangsgrössen kriege ich zwei Ströme, Ia und Ib. Die werden ins zweiphasige System transformiert (Clarke), sodass ich Ialpha und Ibeta erhalte. Danach noch mittels Park ins Rotorfeste System, das ergibt dann Id und Iq. Soweit richtig? Im Regelalgorithmus (z.B. PI-Regler) wird dann Iq auf den gewünschten Wert geregelt, während bei einer synchronen Maschine Id Null sein sollte - bei einer asynchronen Maschine müsste man, soweit ich weiss, ein kleines Id zulassen, um die magnetisierung des Läufers sicherzustellen. Richtig? Der PI-Regler regelt also diesen Id und Iq, aus dem Regler erhält man die Spannungen Ud und Uq, die man mit inverser Park und Clarke Transformation zu Ua und Ub berechnen kann. Und jetzt? Was mache ich damit in meinem RZM-Programm? Ich denke, wenn man das mit Betrag und Phase rechnen würde, dann würde man die PWM-Zeiten wie folgt berechnen: t1 = (Betrag) * sin(60° - Phase) -- Zeit für Spannungsvektor 1 t2 = (Betrag) * sin(Phase) -- Zeit für Spannungsvektor 2 t0 = (PWM-Periode) - t1 - t2 -- Zeit für Nullvektor richtig? Also eigentlich genau so wie bisher. Was mir nicht so gefällt: Man muss aus den Ud und Uq erst noch Betrag und Phase errechnen; dazu braucht man wohl dann eine Wurzelfunktion sowie einen Arcustangens - ich nehme mal an, Phase = arctan(Ub / Ua) oder so ähnlich, während Betrag = sqrt(Ub^2+Ua^2). Oder? Wie müsste man die Zeiten t1, t2 und t0 rechnen, wenn man direkt Ua und Ub verwenden möchte?
Hallo, das ganze wird im Prinzip noch einfacher wenn du die alpha und beta Komponenten der Spannungen im rotierenden System als Eingangsgrößen der RZM benutzt. Schau dir mal ein paar Application Notes an: http://www.google.de/#q=application+note+"space+vector+modulation"+filetype:pdf mfg Stefan
Hallo Stefan, ich habe gerade etwas in einer Application Note von Atmel gelesen: http://www.atmel.com/dyn/resources/prod_documents/doc7671.pdf, Seite 7, Table 4-3. Dort steht: "Compare Register Values", und dann abhängig vom Sektor die beiden alpha- und beta Komponenten: im 1. Sektor wird offenbar - da - db benutzt, anschliessend - da + db, dann da + db usw. usf. Ist das wirklich so einfach? :-)
Hallo, schau dir mal die AN3301 von Freescale an. Da ist das ganz gut erklärt finde ich. Die SVM ist schon eine ideale Sache um sie auf einem Mikrocontroller zu implementieren, wenn man die alpha und beta Komponenten benutzt. Das ganze sind am Ende nur ein paar Vergleiche und wenige multiplikationen. Sonst nur Plus und Minus. Keine Winkelfunktionen und Tabellen nötig. mfg Stefan
Hallo Peter, kann mich Stefan nur anschließen. Aus den alpha/beta Komponenten lässt sich ziemlich einfach die RZM berechnen. Zunächst wird einfach über Vergleiche der Sektor bestimmt und dann sind nur ein paar Multiplikationen zu rechnen um T1 und T2 zu bestimmen. Das Verfahren mit Betrag und Phase ist aber auch nicht so viel aufwendiger. Atan und Wurzelfunktionen braucht man nicht zu rechnen. Mit Hilfe des CORDIC Algorithmus kann man sehr schnell Betrag und Phase in einem Rutsch berechnen. Auf einem ARM lässt sich das sehr gut umsetzen. Das mit den Id != 0 ist bei der ASM richtig. Wobei ich hier kein Profi bin. Habe die FOC bisher nur für PMSMs implementiert. Welche Motoren willst Du denn einsetzen? Oben hast Du etwas von brushless bzw. Servomotor geschrieben. Bei den Motoren würde ich jetzt erst mal von PMSMs ausgehen. Bei PMSMs ist die FOC wesentlich einfacher zu implementieren da man kein direktes Flussmodell benötigt um den Id Sollstrom für die Regelung zu berechnen (ausgenommen von ein paar speziellen PMSMs). Viele Grüße, Ralf
Hallo, könnt ihr mir denn mal ein Beispiel nennen, wie ich die RZM nun berechnen soll? Zwischenkreisspannung sei 60 VDC, der Regler gibt aus: Ualpha sei 30, Ubeta sei 45. Was mache ich dann mit diesen Angaben? Was aus dem PI-Regler raus kommt, sind ja wohl kaum Volt.
Morgen Peter, habe ein wenig gebraucht. Musste mir die Geschichte auch nochmal ansehen... Bei deinem Beispiel würde der Ausgangsspannungsvektor im ersten Sektor liegen (Phi ~= 56°). In diesem Fall würde sich die Vektorlänge (= Einschaltdauer) von Vektor 1 (100) nach der Formel |Ualpha|-1/sqrt(3)|Ubeta| berechnen. Der andere Vektor 2 (110) nach der Gleichung 2/sqrt(3)*|Ubeta|. In deinem Beispiel ist noch eine Besonderheit drin, d.h. Deine Komponenten ergeben einen Ausgangsspannungszeiger mit einer Länge von 54V. Das ist mit der RZM und einer ZK-Spannung von 60V nicht realisierbar. Bei der ZK-Spannung von 60V ergibt sich eine maximale Ausgangsspannug von 2/3*60V = 40V. Diese Spannung stellt sich an einer Wicklung ein wenn Du konstant einen der möglichen Ausgangszeiger einstellst. Bei der RZM musst Du diesen Wert noch mit cos(30°) multiplizieren um die eigentliche Maximalspannung zu berechnen. Bei Dir kommt dann eine Maximalspannung von 34,6V heraus. Deine Regler geben im Normalfall keine direkten Spannungen aus. Stattdessen gibt der Regler eine bezogene Spannung aus. Bei Dir können das z.B. die 60V oder auch die maximale Ausgangsspannung von 34,6V sein. Der Regler würde also eine Spannung von 0 bis 100% ausgeben. Diesen Prozentwert kann man dann sofort hernehmen um die verschiedenen Einschaltdauern der Vektoren zu berechnen. Schau Dir mal die FOC von STM an. Habe gesehen das ST die FOC Library jetzt ins Netz gestellt hat. In der Doku ist auch die RZM mit alpha/beta Komponenten beschrieben. Viele Grüße, Ralf
Hallo zusammen, ich beschäftige mich derzeit auch mit der Umsetzung einer RZM. Was ich bisher noch nicht verstanden habe ist woher der Faktor 2/3 bei der Berechnung der Maximalspannung kommt. Der Faktor cos(30°) kommt ja daher das ich den inneren Kreis als Grenze verwende der das Sechseck tangiert oder? Wenn ich meine ZK-Spannung * 2/3 * cos(30°) rechne, ist das ja das gleiche wie ZK-Spannung/sqrt(3). Und das ist ja bei einem symmetrischen Drehstromnetz meine Strangspannung. Ich erzeuge mit der RMZ doch immer die Außenleiterspannungen richtig? Im Gegensatz zu Sinus-PWM erreiche ich bei der SVPWM ja eine 15% gesteigerte Effektivität. Hat das was damit zu tun, das man zusätzlich die Nullzeiger ausgibt und dadurch eine dritte harmonische erzeugt wird? Oder wodurch entsteht diese dritte Harmonische?
Ich suche bisher leider vergeblich nach einer Erklärung für folgende Frage: Wodurch entsteht diese charakteristische Signalform (Popokurve) der einzelnen Strangspannungen? Warum sind diese nicht wie die Phase-Phase-Spannungen sinusförmig sondern haben eben diesen "popoförmigen" Verlauf. Die SVPWM wird doch hier im linearen Bereich betrieben, dh mein Sollzeiger verläuft auf dem inneren Kreis des Sechsecks, oder? Ich hoffe auf eine baldige Erklärung der hier Anwesenden. Ich habe noch ein Video zu dem Thema gefunden wo genau dieser Signalverlauf hergeleitet wird. Allerdings lässt sowohl die Bildqualität als auch die Tonqualität zu Wünschen übrig. Daher komme ich auch damit nicht weiter. http://www.youtube.com/watch?v=w5dEvLbrCI4&feature=relmfu (ab 25min)
Hallo olnol, hab gerade in meinen Unterlagen von der FH gekramt. Zitat: "Zum Arbeiten mit Drehzeigern und auch für die später behandelte Rücktrans- formation ist es einfacher, wenn die Längen der Drehzeiger gerade den Amplituden der Phasengrössen entsprechen. Deshalb wird in der Gleichung zur Bildung des Drehzeigers willkürlich ein Faktor 2/3 eingeführt: " wenn du dasselbe meinst wie ich, dann kommt das wohl daher. Bei deinen restlichen Fragen kann ich dir allerdings nicht weiter helfen. Ich hab den Stoff auch nur erst Ansatzweise behandelt, das wird erst später noch vertieft... P.S.: kann es übrigens sein, dass man diese charakteristische Signalform als "Supersinus" bezeichnet? Ich hab hier ein relativ altes Buch über Leistungselektronik, wo von einer sogenannten "Supersinusmodulation" gesprochen wird, und da ist exakt jene Kurve abgebildet.
Hallo olnol, versuche dir mal einen virtuellen Sternpunkt vorzustellen. d.h. so wie bei einem normalem Drehstrommotor der Nullleiter. Aus dieser Sicht sind alle 3 Kurven schöne Sinuskurven. Und das ist ja auch das Ziel der Übung. Wir haben hier aber keinen Sternpunkt sondern nur die Zwischenkreisspannung als Gleichspannung. Und aus dieser Sicht muss man eben diese "Popokurven" erzeugen damit aus Sicht des Sternpunktes wieder Sinus raus kommt. Also wie so oft im Leben. Die selbe Sache aus verschiedenen Blickwinkeln sieht manchmal ganz schön komisch aus.
Also nur nochmal zum eigenen Verständis. Die Spannungen gemessen zwischen Sternpunkt der B6-Brücke ( zweimal Uzk/2 in Reihe, in der Mitte Sternpunkt) und der jeweiligen Phase haben den oben erwähnten Popokurven-Verlauf. Die Spannungen zwischen den jeweiligen Phasen sind wiederum sinus-förmig. Ich habe heute noch etwas recherchiert und wohl herausgefunden durch die B6-Brücke,bzw, durch die verschiedenen Schaltzyklen und Generierung der Raumzeiger der Sternpunkt kontinuierlich um einen bestimmten Wert verschoben wird. Daraus resultiert eine Sternpunktspannung, dh es entsteht eine Spannung zwischen Sternpunkt Last und Mittelpunkt ZK. Und aufgrund dieser Tatsache entsteht der charakeristische Spannungsverlauf. Ist das so richtig?
Nochmals ich... Beim normalen 3-Phasen Drehstromnetz mit einem im Stern geschalteten Verbraucher habe ich doch immer die gleiche Strangspannung an jedem Strang anliegen. Nutze ich jedoch meine Raumzeigermodulation mit Zwischenkreis und B6-Brücke ist dies nicht der Fall. Beim Vektor 100 stellt sich an Strang a die Spannung 2/3 Uzk und an Strang b,c die Spannung -1/3 Uzk ein. Folglich ist mein System nicht mehr symmetrisch und mein Sternpunkt vom Verbraucher verschiebt sich. Richtig?
olnol schrieb: > Nochmals ich... Beim normalen 3-Phasen Drehstromnetz mit einem im Stern > geschalteten Verbraucher habe ich doch immer die gleiche Strangspannung > an jedem Strang anliegen. In Mittelschon, über die Zeitändert sich die Spannung natürlich > Nutze ich jedoch meine Raumzeigermodulation mit Zwischenkreis und > B6-Brücke ist dies nicht der Fall. Beim Vektor 100 stellt sich an Strang > a die Spannung 2/3 Uzk und an Strang b,c die Spannung -1/3 Uzk ein. Richtig > > Folglich ist mein System nicht mehr symmetrisch und mein Sternpunkt vom > Verbraucher verschiebt sich. Verschiebt sich nur im Vergleich zur Mitte der Zwischenkreisspannung, die ist der Motor aber egal.
Axel Düsendieb schrieb: > Verschiebt sich nur im Vergleich zur Mitte der Zwischenkreisspannung, > die ist der Motor aber egal. Aber ist das nicht der Grund für die Popokurve der Strangspannungen?
olnol schrieb: > Also nur nochmal zum eigenen Verständis. Die Spannungen gemessen > zwischen Sternpunkt der B6-Brücke ( zweimal Uzk/2 in Reihe, in der Mitte > Sternpunkt) und der jeweiligen Phase haben den oben erwähnten > Popokurven-Verlauf. Die Spannungen zwischen den jeweiligen Phasen sind > wiederum sinus-förmig. > Nein, so stimmt es nicht. Nimm 3 gleiche Widerstände in Sternschaltung und in den Sternpunkt kommt die Masse eines Oszis dran. (Aufpassen das es über den Schutzleiter des Oszis nicht zum Kurzschluss kommt). Dann wirst du an jeden der 3 Phasen einen schönen Sinus messen. Wenn das Oszi über mehrere Kanäle verfügt, ist so auch der Versatz der 3 Phasen schön zu sehen. Wenn der GND des Oszis an Plus oder Minus des Zwischenkreises kommt, dann sind die "Popokurven" zu sehen.
Ok vielen Dank. Ich denke ich habe den Sachverhalt einigermaßen verstanden. Doch eine nächste Frage: Gegenüber der Sinus-PWM bietet die SVPWM eine um 15% bessere Ausnutzung der Zwischenkreisspannung. Konkret: Bei 24V UZK kann ich maximal eine verkettete Spannnung, dh zw. zwei Phasen des Motors, mit einer Amplitude von 24*1.15=27,6V erreichen??? Und bei Sinus-PWM dann eben maximal nur Uzk zwischen zwei Phasen???
Nocheinmal: SVPWM: Annahme 24V Uzk, das bedeutet eine max. Länge eines aktiven Vektors von 24 *2/3. Um einen sinusförmigen Spannungsverlauf zu erhalten Begrenzung auf inneren Kreis, dh. max. mögl. Vektorlänge 24*2/3 * sqrt(3)/2 = 24/sqrt(3) = 13,85 V. Diese Spannung entspricht dann genau der Strangspannung einer dreiphasigen symmetrischen Last. Richtig? Somit ist ergibt sich die verkettete Spannung zu 13,85 * sqrt(3) = 24V. Richtig? SinePWM: 24V Uzk, folglich max. Länge eines Vektor 24/2=12V. Diese 12V entsprechen wiederum genau der Strangspannung. Verkettete Spannung ergibt 12* sqrt(3) = 20,78V Ergebnis: Vekettete Spannung SVPWM/Verkettete Spannung SinusPWM = 24/20,78= 1,15 Habe ich das so richtig verstanden????
Kann jemand die og. Rechnung bestätigen/nachvollziehen!?!!??!?
Ich muss nochmals konkret nachfragen: Die Fragen beziehen sich auf die Raumzeigermodulation. Die Spannung zwischen zwei Phasen ist sinusförmig, richtig! Die Spannung zwischen einer Phase und dem Zwischenkreis-Mittelpunkt ist popo-förmig!? Die Spannung zwischen einer Phase und dem Motorsternpunkt(Phasenspannung) ist sinusförmig? Die Spannung zwischen dem Motorsternpunkt und der Zwischenkreismittelpunkt ist dreiecksförmig?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.