
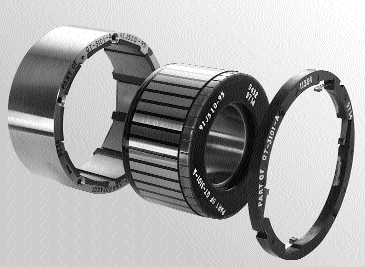
Hallo, wie hier z.B. zu sehen http://www.kollmorgen.com/en-us/products/motors/dc_motors/dc_torque_motors/dc_torque_motors/ http://www.axsys.com/index.cfm?acronym=direct-drive-motors (oder im Anhang) gibt es Servo-Motoren die aussehen wir Kugellager. Direct Drive, hat schon mal jemand damit gearbeitet, gibt es irgendwo bezahlbare Motoren zum Testen, oder kennt sich etwas damit aus? Ich würde gern eine Kameraführung damit bauen. Alle Profi Systeme in diesem Bereich arbeiten mit diesen Stell-Motoren... Über Feedback würde ich mich sehr freuen, ich find im deutschen Netz leider nicht besonders viel hierzu... Vielen Dank & Viele Grüße Ben
Angehängte Dateien:
-

dc_torque_motor.jpg
17 KB
Hi Sven, du verwechselst hier etwas, oder fällst auf die Namen herein. Das was in der Industrie als Servo-Motoren bezeichnet wird hat nichts mit den Servos im Modelbau zu tun. Und da du von Stellmotoren schreibst, denke ich mal das du die Modelbau-Servos meinst. Die Industriellen Servos sind normaler Weise Drehzahl oder Leistungsgeregelte Motoren. Im gegensatz zu den Positionsgeregelten Motoren der Modelbauservos. Diese TorqueMotoren trennen nun die Servo-Idee (Motor und Regler in einem) wieder auf und integrieren sich in die Stelleinheit um weniger Masse zu beschleunigen. Man kann sie zwar auch recht gut positionieren, aber ihre Stärke liegt darin, das sie bei geschickten Einbau sehr schnell beschleunigt und abgebremst werden können. Gruß, TManiac
Das sind nichts anderes als ringförmige Direktantriebe. Normalerweise bezeichnet man die einfach als "Torque-Motoren". Das sind elektrisch kommutierte, i.d.R. 3-phasige Synchronmotoren. Von der Ansteuerung her identisch zu normalen industriellen Synchron-Servos und entsprechenden Direktantrieben. Durch die hohe Polzahl erreicht man hohes Moment bei vergleichsweise niedrigen Drehzahlen, ähnlich wie beim Schrittmotor, nur das man hier das Rastmoment so gut es geht vermeidet und den Motor geregelt betreibt. Für den Hobby-Einsatz ist das nichts. Die Dinger sind teuer, müssen aufwendig gelagert werden und die Güte der Regelung hängt wesentlich von einem hochwertigen Messsystem sowie dessen Montage ab. Und natürlich von einer entsprechenden Parametrierung der Regelung. Ich habe während meiner Zeit als Assisten am Werkzeugmaschinenlabor in Aachen mit Direktantrieben gearbeitet, kenne mich also "ein wenig" in der Materie aus. Mit freundlichen Grüßen Thorsten Ostermann
Angehängte Dateien:

Hallo, super Vielen Dank für Euer Feedback. hmmm, schade, dann werd ich wohl mal besser bei den Modellbau-Servos bleiben.... vielleicht tut sich da ja in Zukunft etwas. viele grüße Ben
Ich habe auch schon so kleine Remoteheads gebaut und nach den ersten Versuchen "normale" Modellbauservos verworfen. Wenn man nicht gerade die Servoelektronik und das Poti rausreisst und nur die Mechanik nimmt, taugen die nicht wirklich für etwas, wo man auch im Filmen drehen kann/darf. Das Zeug ist viel zu ruckelig und unpräzise. Ich habe dann eine "normale" Lösung mit kleinem Getriebemotor und Drehgeber gemacht und einen AVR den PID-Regler spielen lassen. Das ist schon eine ganze Ecke besser, insb. weil man on-the-fly die Regelungseigenschaften ändern kann (High-Speed für Positionierung, starke Dämpfung beim Filmen). Es gibt aber da immer noch zwei Probleme: a) Bin ich kein Regelungspezialist, d.h die Regelstrecke ist nicht so ganz optimal und ziemlich gedämpft, damit es keine Überschwinger gibt. Ok, mein Problem ;) Ich werde bei der nächsten Variante wohl Schrittmotoren im Mikroschrittbetrieb nehmen, dann reicht auch ein Indexsensor. b) Nachdem das kleine 0815-Motoren mit wenig Polen sind, braucht man eine hohe Untersetzung, damit eine feine und ruckfreie Positionierung auch im Zoom möglich ist. Die Zahnräder haben immer Spiel, egal wie teuer das Zeug ist. Das ist bei Richtungswechseln im Zoom sichtbar. "Professionelle" Remoteheads (nicht so Billigkram wie oben, eher was von Panther) haben kein normales Getriebe, sondern kaskadierte Zahnriemensätze und damit absolut kein sichtbares Spiel, hab selber dran gewackelt.... Werde ich wohl auch mitsamt den Steppern probieren..
Hallo, danke, sehr interessant, von dem Bild oben (Servocity.com) gibt es glaube ich auch so ein Panther Remotehead (mit Riehmen), "PT-2100" und hier einige Videos davon http://www.youtube.com/ServoCity#p/u/24/UrmDJi5bk2w Welche Modellbau-Servos hattes Du denn verwendet? Mitlerweile gibt es ja auch Digitale Servos, sogar Brushless Servos, extrem schnell und genau, wie man hier z.B. sieht http://www.youtube.com/watch?v=EFnY0wLXCLg Dachte bisher, mit noch einer 1zu5 Untersetzung http://www.youtube.com/watch?v=G17ZNDR4RgQ würde das schon sehr genau werden. Müßte eigentlich aber auch mit Zahnriehmen gehen... nur die Servos kann ich glaube ich nicht so einfach ersetzten. Viele Grüße Ben
1899$? Viel zu billig, das PT steht da sicher nicht für Panther ;) Das Logo fehlt auch... Die Mechanik sieht schon gut aus, aber die "super slow motion" im Video ist bei extremen Zoom auch schon viel zu schnell. Das muss noch deutlich langsamer sein. Für meine Anwendung wäre das auch nichts, weil es keine absolute Positionierung gibt, nur so analoges Joystickgeeiere... Bei mir gibts noch ein Notebook zur Speicherung verschiedener Positionen und Fahrten. Ich habe "normale" Servos vom Conrad probiert, aber sicher nicht die teuersten. AFAIK heisst "digitales Servo" aber auch nur, dass die Regelschleife im Servo digital läuft, die blöde Pulssteuerung ist weiterhin da.
Georg A. schrieb: > Ich habe "normale" Servos vom Conrad probiert, aber sicher nicht die > teuersten. Also vermutlich billigst-Servos? Die taugen tatsächlich nicht viel. Du hast großes Zahnradspiel, billige Potis und schlechte Lagerung. Bei analogen Servos auch eine recht träge Regelung. Wenn du statt 10 Euro mal 200 ausgibst, sind da schon nochmal Welten dazwischen. > AFAIK heisst "digitales Servo" aber auch nur, dass die Regelschleife im Servo digital > läuft, die blöde Pulssteuerung ist weiterhin da. Ist die denn ein Problem?
> Also vermutlich billigst-Servos? Es waren immerhin schon welche mit durchgängigem Metallgetriebe und beidseitigen Kugellagern... Das Problem bei einem vernünftigen Remotehead ist NICHT die Geschwindigkeit, sondern eine geschmeidige langsame Bewegung ohne Ruckler beim Anfahren/Abbremsen. Das ist halt eine ganz andere Anforderung als beim Modellbau, wo es nur ums schnelle Ankommen geht und weniger auf den Weg dahin ;) Und solange der Regelungsalgo im Servo abläuft, kann man da gar nichts anpassen. Schon eine kleine Videokamera hat ein ziemliches Trägheitsmoment und sorgt für viel Spass beim Anfahren und Abbremsen... > Ist die denn ein Problem? Meine Positionierung hat jetzt eine Genauigkeit von 0.04 Grad. Die braucht man auch für langsame Schwenks, das ist im Zoom so grade noch brauchbar. Das will ich mal mit dem Pulsverfahren und Servos mit Poti-Positionierung sehen. Ich habe inzwischen schon einige andere Remoteheads mit Modelbauservos gesehen, die taugen aber wirklich nur zur Ausrichtung der Kamera vor dem Filmen.
Schrittmotor im 250 fach Mikroschrittbetrieb also bei 200 Vollschritten 200x250=50000 Schritte pro Umdrehung. 360°/50000=0.0072° pro Schritt. Kann man noch mit Zahnriemen untersetzen. Finde die Tango PCI-S usw. ganz gut. Und MicroLynx ist ganz anständig für Standalone Systeme und erweiterbar und man kann mehrere Module zusammenschalten (mit Softgetriebe)
Einen ganzen PC mit PCI-Karte wollte ich dann auch nicht rumschleppen ;) Schon der jetzige RH ist nur per Bluetooth ans Notebook angebunden, das sollte nicht schlechter werden. Für den Stepper-Remotehead plane ich jetzt mal mit dem A4982, der kann 16xMicrostepping und sollte für einen kleinen Motor völlig ausreichen.
>Und solange der Regelungsalgo im Servo >abläuft, kann man da gar nichts anpassen. Die Graupner Digitalservos haben nen ATMEGA16. Die kann man sehr gut mit ner eigenen Firmware austatten.
Angehängte Dateien:
-

cineflexhd.jpg
450 KB

Hi, hab hier noch ein Bild gefunden vom Innenaufbau einer Cineflex HD (ist weltweit wohl der Mäßstab für Remote Heads) Die nutzen natürlich Torque Motoren (Hersteller ist Axsys). Angegeben Genauigkeit ... 0.000636 Grad (10 microradian) ... :) vg Ben
ich hätte noch eine Frage, ist ein Torque Motor und ein "frameless brushless motor" das gleiche? Ich finde die sehen zumindest gleich aus http://www.google.de/search?q=frameless+brushless+motor&um=1&ie=UTF-8&tbm=isch&source=og&sa=N&hl=de&tab=wi&biw=989&bih=544 ... und da gibt es auch mehr Anbieter für... @Thorsten Ostermann Werden alle Toque Motoren wie Brushless-Motoren (mit 3 Phasen) gesteuert? Nur Interesse halber... Vielen Dank & Viele Grüße Ben
Hallo Ben! Die Begriffe sind soweit ich weiss in keiner Norm spezifiziert. Wann ein Synchronmotor als Torque-Motor bezeichnet wird, ist also Auslegungssache. "Frameless" bedeutet lediglich "ohne Gehäuse", und genau das sind die meisten Torque Motoren ja auch. Im Deutschen spricht man auch von "Bausatzmotoren", weil die Lagerung Teil der umgebenden mechanischen Struktur ist. Damit lassen sich sehr kompakte Gesamtlösungen bauen, z.B. in Gabelköpfen oder Schwenktischen von Werkzeugmaschinen. In den Anfangstagen der Linearmotoren (Anfang der 90'er), als der Markt noch nicht so von den großen Herstellern dominiert war, gab es auch 2-phasige Linearmotoren. Ich habe in der Firma sogar noch einen Linearschrittmotor (auf Basis des Reluktanzprinzips) liegen. Ich würde aber mal davon ausgehen, das abgesehen von exotischen Anwendungen der Aufbau 3-phasig mit Permanentmagneten ist, also einem permantenterregten Synchronmotor entspricht. Nachdem die Chinesen sich den Markt für die Magnet-Werkstoffe gesichert haben und die Preise steigen, kann das in einigen Jahren allerdings schon wieder anders aussehen... Mit freundlichen Grüßen Thorsten Ostermann
Hallo Zusammen, da bin ich wieder, nachdem ich die Idee fast begraben hatte, hab ich nun dieses Video entdeckt http://www.youtube.com/watch?v=ewK7NkcCFCk&feature=related Nicht ganz das gleiche, aber die Performance ist großartig. DC Servo Motoren von dynetic.com Ich frage mich gerade wie diese angesteuert werden? Hat Erfahrungen mit solchen Moteren? Weiß jemand ob man diese auch für normale Bieftaschen in Deutschland bekommt? So exotisch sehen die jetzt nicht aus, wie die Frameless-Motoren... :) vielen Dank ben
Hallo Ben! Das werden ganz normale EC-Motoren sein (bürstenlose, elektronisch kommutierte Gleichstrommotoren mit Positionsfeedback). Mit freundlichen Grüßen Thorsten Ostermann
Hallo Dank, ich seh gerade, Ihr habe nur Schrittmotoren (ich glaube das ist von der Steuerung noch etwas anders). Von dem gezeigten Remote-Head gibt es auch ein Patent, http://www.google.com/search?q=7642741&btnG=Search+Patents&tbm=pts&tbo=1&hl=en Demnach ist der Motor ein Brush DC Motor, 36V, wird aber mit 18V betrieben und braucht 4 ampere pro Achse, mit einer 1:10 Untersetzung (Planeten Getriebe mit < 10 Arc Minuten Spiel) Vielleicht kann man das Getriebe auch mit einem Riehmenantrieb lösen. Ich weiß garnicht wie man Brush oder Brushless Motoren so genau ansteuert... als Servo und nicht als Motor der ein Rad antreibt. Sind hier Brush oder Brushless-Motoren besser geeignet? Ist die Steuerung von Brush Motoren einfacher (günstiger, kleiner zu haben) Wo gäbe es eine Steuerung? Über Tipps würde ich mich sehr freuen. Viele Grüße Ben
Achso, ob die mit Positionsfeedback arbeiten weiß ich nicht genau. Bei den Dynetic Motoren würden man die Encoder ggf. deutlich sehen http://www.dynetic.com/pdfs/Brushed/Section%20A/Dynetic%20Systems%20Catalog.pdf
Hallo, > Das werden ganz normale EC-Motoren sein (bürstenlose, elektronisch > kommutierte Gleichstrommotoren mit Positionsfeedback). Ich hatte hier nochmal ein Video mit solchen Motoren gesehen. http://www.youtube.com/watch?v=pWdOoGDqzLw "maxon motor Australia announce the multi axis motor control EPOS 2 36/2 motherboard range. " nur leider kostet das ganze wohl mindestens 1.200 netto für 3-Achsen Die günstigesten Komponenten sind EPOS2 Module 36/2, 2 A, 11- 36 VDC >> 200 EUR netto EC 45 flat Ø45 mm, bürstenlos, 70 Watt, mit Hall-Sensoren >> 90 EUR netto und einiges (Motherboard) etc. fehlt leider noch. >> + X Kennt hier jemand Alternativen? Vielen Dank Ben
Angehängte Dateien:
wwww.sctonline.ch DC Direct Drive Motor Sorry Shop ist im Aufbau
Es hat schon seinen Grund, warum man heute vielfach BLDC-Motoren (bürstenlos) statt normaler DC-Gleichstrommotoren (mit Bürsten) verwendet. Warum DC-Motoren jetzt als Torque-Motoren auf einmal vorteilhafter sein sollen als BLDC erschließt sich mir nicht. Es mag höchstens sein, dass noch niemand auf die Idee gekommen ist, Torquemotoren mit Niederspannungswicklung zu bauen. Die meisten Torquemotoren sind ja "echte" Synchron-Servos für Spannungen von 230V und mehr. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.