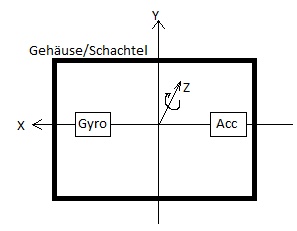
Hallo zusammen, ich möchte die Bewegung einer "Schuhschachtel" messen, verfolgen, tracken. Angenommen diese kann sich völlig frei im Raum bewegen. Hierzu wird darin eine Platine mit Drehratensensor (3Achsen) und Beschleunigungssensor (3Achsen) befestigt. Ich frage mich welchen Einfluss hat die Positionierung der Sensoren auf die Verwertbarkeit der Messergebnisse. Angenommen die Schachtel dreht sich ausschliesslich um ihre Hochachse (Z) - so wie im Bild eingezeichnet. Der Gyro sitzt ausserhalb der Drehachse. 1.) Wird er mir trotzdem die korrekte Drehrate (°/s) messen? (Ich vermute: ja). Das ist mir die wichtigste Frage. 2.) Spielt es überhaupt eine Rolle, wo innerhalb der Schachtel der Gyro sitzt? Bekomme ich immer die gleichen Messwerte als säße er genau IN der Drehachse? 3.) Wird die Messgenauigkeit darunter leiden, dass jetzt zusätzlich noch eine Beschleunigung auf den Gyro wirkt? (Ich vermute: spielt keine praktische Rolle) 4.) Der Beschleunigungssensor (Acc) wird je nach Drehachse, bzw. seiner Entfernung davon, unterschiedliche Beschleunigungen messen. Richtig? Kann man sagen: Wäre die Drehachse nur halb so weit weg, hätte ich den halben Messwert? (Erdanziehung unberücksichtigt) Also linear die Beschleunigungen dazwischen interpolieren? Nächster Fall: Zusätzlich zur Drehung um Z kommt noch eine lineare/konstante/gleichförmige Bewegung in X-Richtung dazu. 5.) Den Gyro läßt das kalt, den Beschl.sensor ebenso. Ich kann diese konstante Bewegung nicht anhand der Momentanmesswerte erfassen. Richtig? Wäre nett, wenn mir jemand meine Überlegungen bestätigen/widerlegen könnte. Eine konkrete Anwendung dazu habe ich (noch) nicht, sondern möchte mir das zunächst einmal theoretisch überlegen. Danke.
Angehängte Dateien:
-

Schachtel.png
1,5 KB
Der Gyro sitzt optimalerweise an der Drehachse. Sonst kommen noch andere terme hinzu. Der Beschleunigungssensor sollte im Schwerpunkt sitzen, sonst kommen auch noch andere Terme hinzu. Aber moeglicherweise macht's ja nicht aus. Probier's doch einfach - Falls berechnen nicht machbar ist.
Dieter schrieb: > 1.) Wird er mir trotzdem die korrekte Drehrate (°/s) messen? (Ich > vermute: ja) Nein. Das Gyroskop misst die Drehrate um die Messachse und nicht um eine beliebige Achse. Wie schlimm das ist kannst du ja ausrechnen. Ein wenig Physik schadet glaube ich niemandem. Das sollte man so und so beherrschen, wenn ich mein Modell von meiner Messaufgabe erstelle. Dieter schrieb: > Spielt es überhaupt eine Rolle, wo innerhalb der Schachtel der Gyro > sitzt? Bekomme ich immer die gleichen Messwerte als säße er genau IN der > Drehachse? Inwiefern die Fehlpositionierung Einfluss auf dein Messergebnis haben wird das kannst du ebenfalls ausrechnen. Dieter schrieb: > Wird die Messgenauigkeit darunter leiden, dass jetzt zusätzlich noch > eine Beschleunigung auf den Gyro wirkt? (Ich vermute: spielt keine > praktische Rolle) Hast du dich überhaupts schon mal mit Gyroskopen beschäftig? Ich glaube eher nicht. Du solltest dich mal mit der Funktionsweise eines solchen Gyros beschäftigen, dann kannst du dir deine Fragen selbst beantworten. Durch Faulheit ist noch niemand schlau geworden. Dieter schrieb: > 3.) Wird die Messgenauigkeit darunter leiden, dass jetzt zusätzlich noch > eine Beschleunigung auf den Gyro wirkt? (Ich vermute: spielt keine > praktische Rolle) Das wird eher weniger Einfluss haben. Aber deine Wert werden rauschen wie die Sau, weil du keine hochwertigen Gyroskope haben wirst. Die wirst du dir (und jeder andere) auch nicht leisten können / wollen. Dieter schrieb: > Der Beschleunigungssensor (Acc) wird je nach Drehachse, bzw. seiner > Entfernung davon, unterschiedliche Beschleunigungen messen. Richtig? Ein Beschleunigungssensor misst Beschleunigungen. Immer in Richtung der 3 Achsen. Nicht mehr und nicht weniger. Die Erdbeschleunigung ist auch eine Beschleunigung. Sobald du den Beschleunigunssensor kippst, wirkt die Erdbeschleunigung von (definiert) 1g nicht mehr zu 100% auf die Achse, so nimmt auch der Ausgabewert am Sensor ab. In Ruhe (also nicht in Bewegung) kann man einen Beschleunigunssensor also als Wasserwaage verwenden. Sobald er jedoch bewegt wird, sind Erdbeschleunigung und Bewegungsbeschleunigung jedoch vermischt und nicht mehr zu trennen. (Außer in Kombination mit einem Gyroskop und eimem Kalmanfilter) Dieter schrieb: > Kann man sagen: Wäre die Drehachse nur halb so weit weg, hätte ich den > halben Messwert? (Erdanziehung unberücksichtigt) Also linear die > Beschleunigungen dazwischen interpolieren? Wie kommst du da drauf? Wovon sol sie nur halb so weit weg sein? Nochmal neu formulieren. Denk mal ein wenig über Physik und beschleunigte Bewegungen nach. Schau dich mal im Internet ein wenig um - da findet sich einiges. Beschleunigte Drehbewegungen und beschleunigte Translationsbewegungen. Dieter schrieb: > Zusätzlich zur Drehung um Z kommt noch eine > lineare/konstante/gleichförmige Bewegung in X-Richtung dazu. > > 5.) Den Gyro läßt das kalt, den Beschl.sensor ebenso. Ich kann diese > konstante Bewegung nicht anhand der Momentanmesswerte erfassen. Richtig. Multi Oschi schrieb: > Der Gyro sitzt optimalerweise an der Drehachse. Sonst kommen noch andere > terme hinzu. Der Beschleunigungssensor sollte im Schwerpunkt sitzen, > sonst kommen auch noch andere Terme hinzu. Auch das ist richtig. Also mal für dich so ein wenig Off-Topic. Das was du da vor hast ist eine sehr anspruchsvolle Aufgabe. Die größeren deiner Probleme hast du noch garnicht bedacht. 1. Ein Beschleunigungssensor rauscht ziemlich stark. Da braucht man gute Filteralgorithmen. 2. Vergiss die Erdbeschleunigung nicht. Wenn du deinen Beschleunigunssensor kippst (in der betrachteten Achse), dann findest du Werte von 0g bis 1g vor. Und das auf allen 3 Achsen, jenachdem wie du kippst. http://www.youtube.com/watch?v=3n0BZv3cCQg&feature=related http://www.youtube.com/watch?v=gRbfKFE5fdc&feature=related Vergiss aber nicht - sobald du den Zirkus zusätzlich zur Erdbeschleunigung bewegst hast du ein Problem. 3. Ein Gyroskop rauscht weniger nur driften sie allzugerne. Soll heißen dein wenn du dein Gyro z.B. permanent konstant mit 100°/s drehst, so wird sich dieser Wert über Minuten hin trotzdem verändern. Gerade bei schneller bewegten Systemen ist das ein massives Problem 4. Um das alles in den Griff zu bekommen gibt es eine tolle Sache: den Kalmanfilter. Der ist zwar ein mathematisches Meisterwerk und nicht ganz trivial aber er ist ein kleines "Wunder". http://en.wikipedia.org/wiki/Kalman_filter Mit einiger Konfiguration und Erfahrung zaubert er sehr saubere Werte und zwar aus der Kombination von Gyroskop und Beschleunigungsmesser. Mal eine Laienerklärung: Seine Grundlage stellen die Werte des Bschleunigunssensors und des Gyroskops dar (normalerweise - die Gewichtung der einzelnen Werte also wie sehr man einem Sensor "traut" definiert man). Beschleunigungswerte sind durch die Erdbeschleunigung und Rauschen verfälscht. Also verwendet man nach der Aufbereitung dieser Werte noch aufbereitete Gyroskopwerte dazu. Das ganze fusioniert man und knallt es nochmal durch Filter durch. Hinten raus kommt dann ein erstaunlich genauer Wert der die Winkel (also die Lage) im Raum zurückgibt. Das alles ist jetzt ziemlich fachlich falsch erklärt - lies dich einfach mal ein. Das ist mathematisch harte Kost. Dir sollte klar sein, dass das keine einfache Aufgabe ist. Das was du vorhast verwendet man für gewöhnlich Matlab in Kombination mit Simulink. Das hat einen Umfang von mehreren Diplomarbeiten / Masterarbeiten. "Einfach die Werte zu verwenden" wie du es vor hast kann man sich leider abschminken. Rein physikalisch müsste ja z.B. eine Integration des Gyrowertes über die Zeit den Winkel geben. Probiert man das in der Praxis aus dann wirst du feststellen, dass dein Computer dir nach ein paar Minuten dir Überschläge prophezeit obwohl dein Gyro seelenruhig auf dem Tisch liegt.
Lehrmann Michael schrieb: >> 1.) Wird er mir trotzdem die korrekte Drehrate (°/s) messen? (Ich >> vermute: ja) > > Nein. Das Gyroskop misst die Drehrate um die Messachse und nicht um eine > beliebige Achse. Wie schlimm das ist kannst du ja ausrechnen. Ein wenig > Physik schadet glaube ich niemandem. Das sollte man so und so > beherrschen, wenn ich mein Modell von meiner Messaufgabe erstelle. Das stimmt doch nicht. Wenn der Gyro wirklich nur die Drehung misst, dann ist es völlig egal wo man ihn plaziert. Das Objekt kann sich nicht an verschiedenen Stellen unterschiedlich schnell drehen.
sebastian schrieb: > Lehrmann Michael schrieb: >>> 1.) Wird er mir trotzdem die korrekte Drehrate (°/s) messen? (Ich >>> vermute: ja) >> >> Nein. Das Gyroskop misst die Drehrate um die Messachse und nicht um eine >> beliebige Achse. Wie schlimm das ist kannst du ja ausrechnen. Ein wenig >> Physik schadet glaube ich niemandem. Das sollte man so und so >> beherrschen, wenn ich mein Modell von meiner Messaufgabe erstelle. > > Das stimmt doch nicht. Wenn der Gyro wirklich nur die Drehung misst, > dann ist es völlig egal wo man ihn plaziert. Das Objekt kann sich nicht > an verschiedenen Stellen unterschiedlich schnell drehen. > Solange sich der Körper, sprich Schuhkarton, während der Drehung nicht verrformt, ist es vollkommen egal wo der Gyro ist. Die Drehrate ist dann im kompletten Körper identisch. Für die Beschleunigungssensoren ist das so nicht übertragbar. Sitz der Beschleunigungssensoren nicht im Drehpunkt des Körpers treten bei Kippbewegungen verfälschte Messergebnisse auf. Die Drehung erzeugt in dem Fall ebenfalls eine Beschleunigung des Sensors Kennt man den Abstand zwischen Drehpunkt und Sensor lässt sich das jedoch mittels Mathematik Korrektur rechnen. Wichtig dabei ist jedoch, das Gyro und Beschleunigungssensor einer Achse auch wirklich zu 100 % auf der gleichen Achse sitzen, sonst wird es wirklich sehr aufwändig mit der Korrektur Berechnung. zu 1) JA solange der Körper Formstabil bleibt zu 2) völlig egal solange der Körper Formstabil bleibt zu 3) Falls ja such dir einen vernünftigen Gyro aus > 4.) Der Beschleunigungssensor (Acc) wird je nach Drehachse, bzw. seiner > Entfernung davon, unterschiedliche Beschleunigungen messen. Richtig? JA > Kann man sagen: Wäre die Drehachse nur halb so weit weg, hätte ich den > halben Messwert? (Erdanziehung unberücksichtigt) Also linear die > Beschleunigungen dazwischen interpolieren? NEIN , so einfach ist es nicht, Die Drehrate spielt dabei auch gewaltig mit Interpolieren ja, nur nicht Linear sondern in Abhängigkeit der Drehrate zu 5) So sollte es sein, wenn nicht bessere Sensoren verwenden. Dazu kommt natürlich noch jede Menge Signalaufbereitung, Filterung, Offsetkorrektur ,....... aber ansonsten geht das schon . Sonst würde in keinem Auto das ESP funktionieren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.