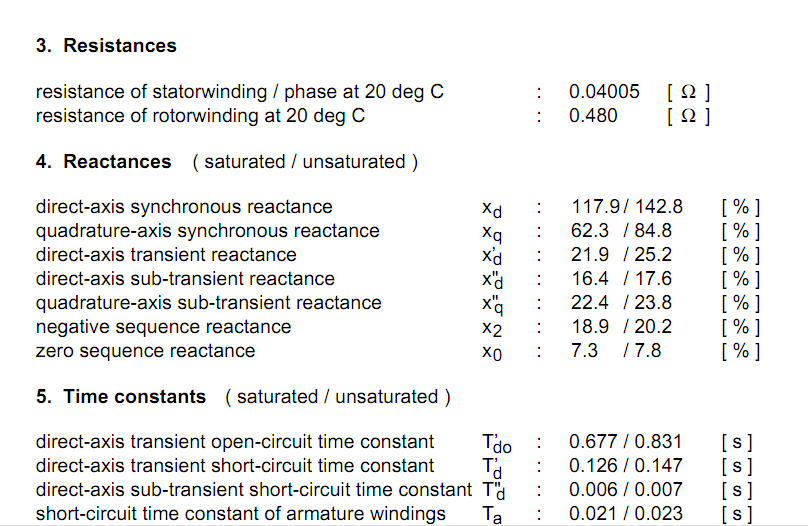
Hallo zusammen, Ich habe ein Problem mit einem Datenblatt eines fremderregten Synchron generators. Dort werden die Reaktanzen in Prozent angegeben. Aber in Prozent von was??? Was sagen mir diese Reaktanzen überhaupt aus bzw. für was sind diese nützlich?? (hinsichtlich modellierung, welche sind wichtig, welche nicht)? grußß und vielen Dank für die Hilfe!
Angehängte Dateien:
-

datasheetgenerator.png
80 KB
Die Angaben sind im Per Unit System (http://de.wikipedia.org/wiki/Per-Unit-System) angegeben. Du musst aus Nennspannung, Nennstrom und Nennfrequenz die Bezugsgrössen berechnen.
HI daniel, vielen dank für deine Antwort. Was dann aber noch unklar ist, auf welchen genormten wert die sich beziehen. Bei einer rated Power von 590kVA wäre dann 1MVA der Bezugspunkt (im Datenblatt steht dazu nichts?!)
Angehängte Dateien:
-

Synchron_dq.jpg
110 KB
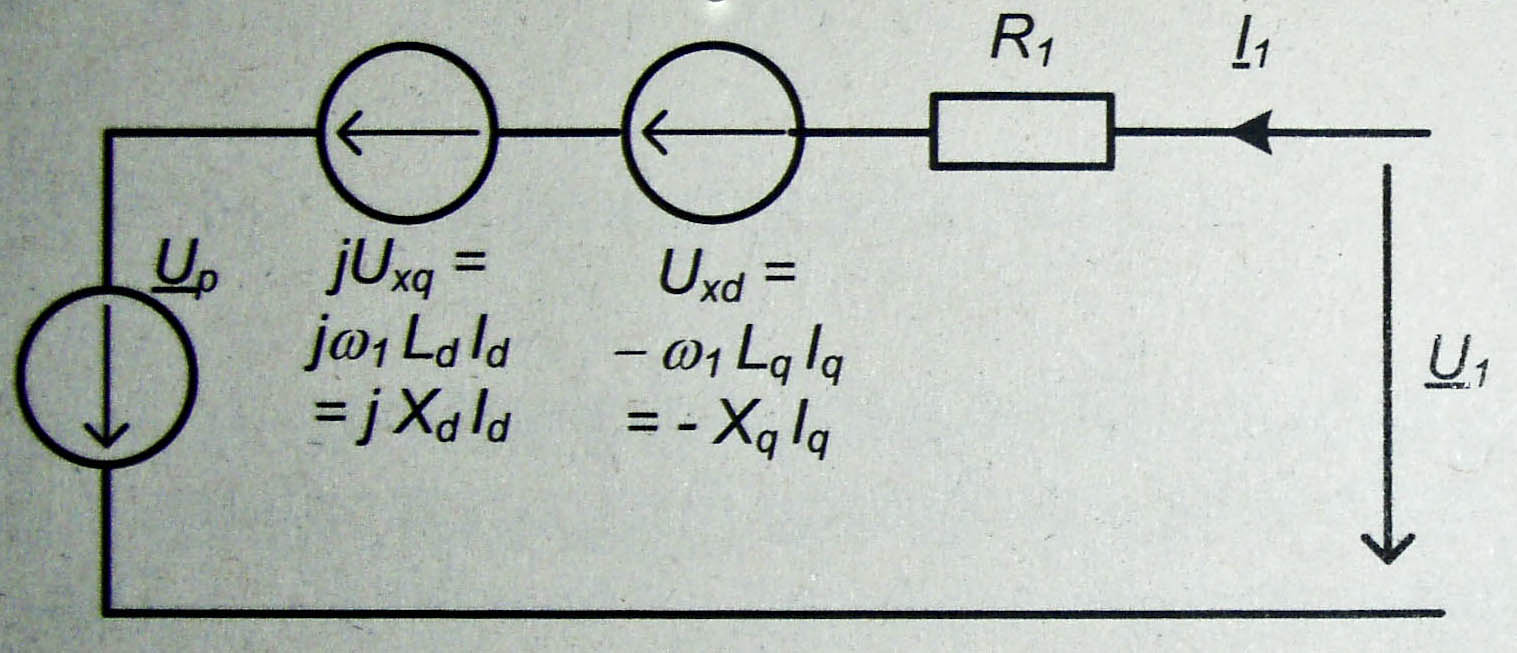
Das Ersatzschaltbild einer Schenkelpol-Synchronmaschine ist als Bild angehängt. Hier ein Schnittbild durch eine Schenkelpolmaschine mit Polpaarzahl 1. http://www.georg-andresen.de/bauart2.jpg x_d sagt Dir, wie gross die Reaktanz ist, wenn der Rotor in Richtung des Rotorflusszeigers zeigt. Im Bild wäre das der Fall, wenn das Feld vertikal verlaufen würde. x_q sagt aus, wie gross die Reaktanz ist, wenn der Rotorflusszeiger genau zwischen zwei Polen steht. Im Bild oben wäre das der Fall, wenn der Rotorfluss horizontal verlaufen würde. Aus der Geometrie heraus ist leicht ersichtlich, dass die beiden Reaktanzen anders sind. Das Per-Unit-System erlaubt Dir nun die Ströme sehr einfach zu berechnen. Über die Zero-Sequence-Reaktanz kannst Du berechnen, wie viel Strom fliessen würde, wenn Du nur eine Phase bestromst und den Sternpunkt angeschlossen hast. Ein ganz einfaches Beispiel für ein Modell eines Generators wäre eine Spannungsquelle mit einer in Serie geschalteten Reaktanz mit 10% p.u. Damit kannst Du direkt sagen, dass der Kurzschlussstrom dem 10-fachen Nennstrom entspricht. Wenn Du nun den absoluten Wert wissen willst, brauchst Du die Bezugsgrössen Nennstrom und Nennspannung. Über Z_Nenn = U_Nenn/I_Nenn kannst Du dann sagen, dass die Serie-Reaktanz den Wert x_serie = 0.1* Z_Nenn hat. Um die Induktivität zu berechnen brauchst Du dann natürlich noch die Bezugsfrequenz des Netzes.
Hi Daniel, vielen vielen Dank für die Infos, werd das ganze mal ein bisschen durchrechnen und mich ggfls. nochmal melden. Gruß
Hi Daniel, konkret geht es jetzt um einen Simulator AMEsim, der auf System-Level arbeitet, d.h. das das Modell keine Feinheiten enthalten sollte....Aus dem Datenblatt muss ich jetzt folgende Parameter (die die simulation benötigt) herausfinden. Induktivität der Feldwicklung, Mutual inductance between stator and Field ( die anderen Parameter hab ich schon), Wie kann man rechnerisch diese mutual inductance herausbekommen. Welcher Detaillierungsgrad des Model der Maschine ist sinnvoll?? Danke schon im Vorraus, bin irgendwie echt ratlos. gruß dan
Hi Dan, welche Wicklung meinst Du mit "Feldwicklung"? Die Statorspulen oder die Rotorspulen? Nicht, dass wir aneinander vorbeireden. Im Fall, dass die Statorspulen gemeint sind, gibt es zwei Induktivitätswerte L_d und L_q, wie ich oben schon angedeutet hatte. Diese Werte stehen ja im Datenblatt. Berechenbar sind die über L_d = (x_d * x_Basis)/(2 pi f_nenn) mit x_Basis = U_nenn / I_nenn. Analog für L_q. Erklär bitte noch genauer zwischen welchen Spulen Du die Mutual Inductance brauchst. Eventuell kann man über die Zeitonstanten was abschätzen (Wicklungswiderstände sind ja angegeben). Daniel
Angehängte Dateien:
-

Params.PNG
52 KB -

Datasheet.PNG
150 KB
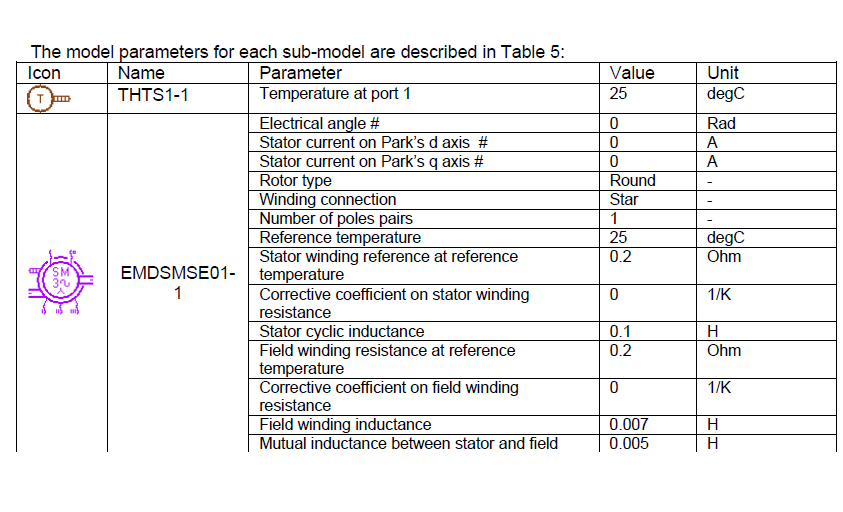
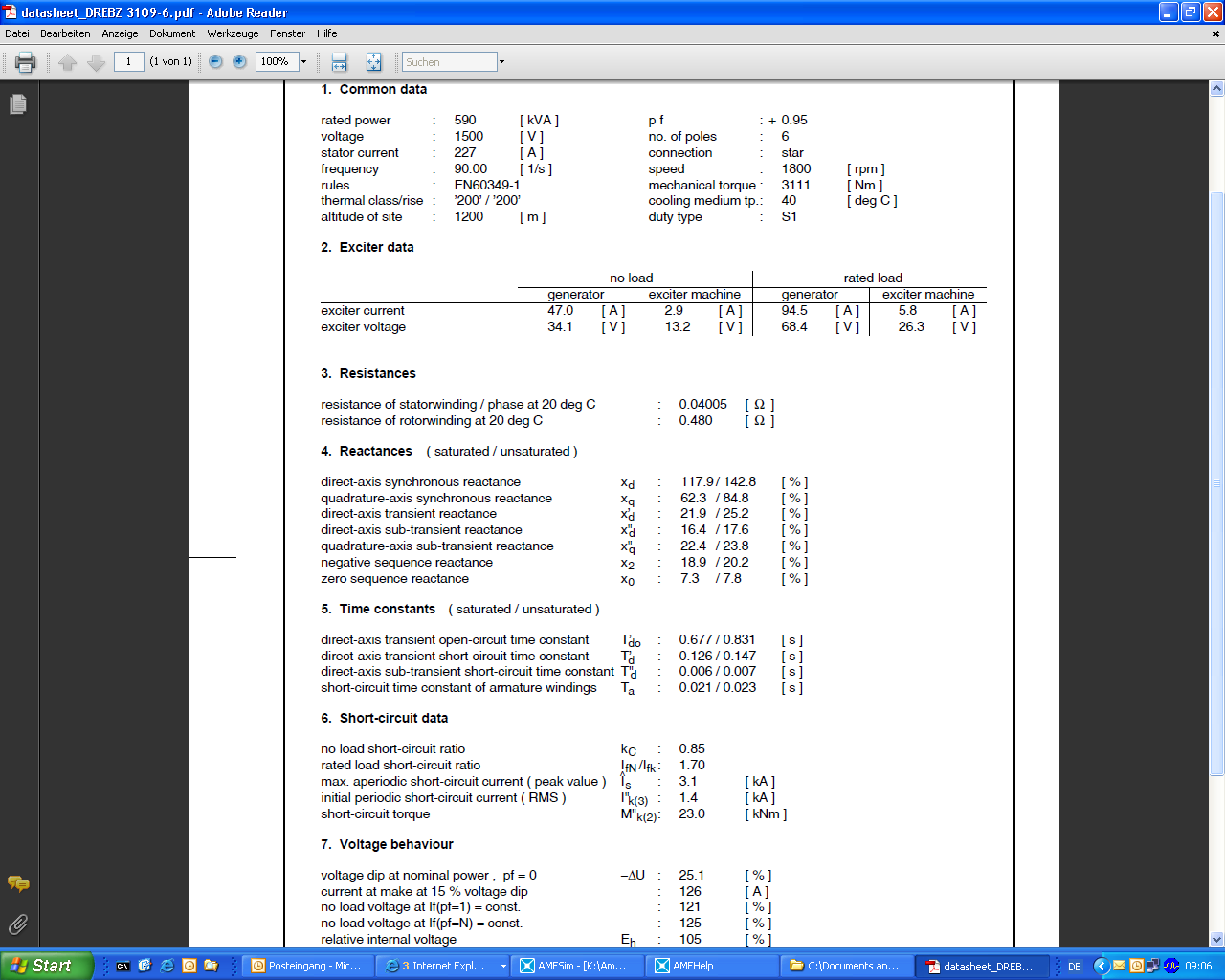
Hi Daniel, vielen Dank für deine Hilfe. Im Anhang ist die Parameterliste der Synchronmaschine mit Fremderregung dargestellt ( ohne Dämpferwicklung). Unter "Values" finden sich die Default-Einstellungen. Field Winding Inductance dürfte die Erregerwicklung sein (niedriger Induktivitätswert ->vgl. Parameter Stator Cyclic inductance). Stator cyclic Inductance: Das dürften die Statorspulen sein, da diese einen höheren Induktivitätswert aufweisen, und auch namlich passen :-). Mutual Inductance between stator and field: Hmmm, Also ich kenn mich nicht soo aus, Schaut man sich den Wert an, ist dieser leicht größer wie der der Erregerwicklung. Und mutual inductance ist ja der Fluss der zusätzlich in den anderen Spulen eine Spannung hervorruft. Das wird dann als Induktivitätswert ausgedrückt. --> hier ist wohl das Problem einen Wert dafür rauszubekommen. Im Anhang hab ich unter Datenblatt auch die Zeitkonstanten zusammengefasst. Die Definition der Mutual Inductance im Simulator hab ich bisher nicht gefunden, aber ich denk, meine Annahmen sind plausibel. Für einen Tip wäre ich wieder sehr dankbar Grüße Dan
Hi Dan, bezüglich der Erregerwicklung (im Simulator Field Winding genannt) kann ich Dir einen Wert liefern: Die Zeitkonstante T_a "Short Circuit Time Constant of armature windings" sagt aus, wie lange es dauert, bis der Erregerfluss bei einem Kurzschluss der Erregerwicklung auf 1/e abgeklungen ist. Der Abfall erfolgt exponentiell und kann als Induktivität in Reihe mit dem Wicklungswiderstand modelliert werden. Die Zeitkonstante einer solchen Anordnung ist:
Da der Wicklungswiderstand (Resistance of Rotor Winding) mit 0.48Ohm und die Zeitkonstante mit 0.022s (Mittelwert beider Werte) angegeben sind folgt daraus:
Die Mutual Inductance zwischen Stator und Erregerwicklung kannst Du grundsätzlich wie folgt berechnen:
Letztendlich ist das eine Definitionsfrage, denn der Kopplungsfaktor ändert sich natürlich mit der Position des Rotors. Wenn ich willkürlich 90% Kopplungsfaktor annehme komme ich auf folgendes:
Leider passt das nicht sehr gut zum Default-Wert im Simulator. Von daher scheint denen wohl eine etwas andere Definition vorzuliegen. Gruss Daniel
Hi Daniel, erst mal danke für deine Antwort. Die Field Inductance (erreger indukt.) hab ich auch so berechnet, klingt plausible. Ld und Lq hätte ich auch so berechnet. Jetzt ist es allerdings so, dass ich diesen Kopplungsfaktor iwie genauer bestimmen müsste, um diesen Koppelinduktivitätsfaktor rauszubekommen. Da werd ich aber wohl den Hersteller befragen müssen und mir die genaue Definition des Simulators anschauen. Mir fallen jetzt aber noch zwei Fragen ein: 1.) Ist es nicht komisch, dass die Erregerinduktivität in der gleichen Größenordnung wie die Statorinduktivität ist? 2.) Kann man aus Ld und Lq mittels Phytagoras den Absolutwert der Spulen berechnen? 3.) Ist aus dem Datenblatt ersichtlich , ob es sich um einen Vollpol-läufer oder um einen Schenkelpolläufer handelt? Danke schon im Vorraus gruß dan
Dan Kübel schrieb: > Mir fallen jetzt aber noch zwei Fragen ein: > > 1.) Ist es nicht komisch, dass die Erregerinduktivität in der gleichen > Größenordnung wie die Statorinduktivität ist? > > 2.) Kann man aus Ld und Lq mittels Phytagoras den Absolutwert der Spulen > berechnen? > > 3.) Ist aus dem Datenblatt ersichtlich , ob es sich um einen > Vollpol-läufer oder um einen Schenkelpolläufer handelt? Zwei Fragen... Erstens, zweitens und drittens ;) Zu 1: Nein, das ist nicht komisch. Ob Du das Feld mit viel Strom und wenigen Windungen (also mit kleiner Induktivität) oder mit wenig Strom und vielen Windungen erzeugst, ist egal. Von daher kann die Erregerunduktivität in einem weiten Bereich liegen. Zu 2: L_d und L_q sind Absolutwerte. Bevor ich es nochmals erkläre, brauchen wir noch die Antwort zu Frage 3. Zu 3: Es ist eine Schenkelpolmaschine. Das erkennt man ganz einfach daran, dass überhaupt L_d und L_q angegeben ist. Eine Vollpolmaschine hat nur L_d, da der Rotor zylindrisch ist. Jetzt nochmals die Erklärung für L_d und L_q: Bei einer zweipoligen Schenkelpolmaschine, wie oben im Bild, ist der Rotor nicht symmetrisch. Er is (im obigen Bild) höher als breit. Angenommen die Statorspulen werden so bestromt, dass das Feld von oben nach unten verläuft, hast Du nur einen kleinen Luftspalt zwischen Stator und Rotor, d.h. das ergibt eine grosse Induktivität, nämlich L_d. Bestromst Du die Statorspulen so, dass das Feld von links nach rechts verläuft, hast Du zwei sehr grosse Luftspalte zwischen Stator und Rotoreisen. Die Induktivität, die Du so messen kannst, ist also klein und nennt sich L_q. Ich hoffe, dass es jetzt verständlicher ist. Daniel
Hi, also das ich als E-techniker nur bis 1 zählen kann, fällt mir erst jetzt auf. Daniel R. schrieb: > Zu 1: > > Nein, das ist nicht komisch. Ob Du das Feld mit viel Strom und wenigen > > Windungen (also mit kleiner Induktivität) oder mit wenig Strom und > > vielen Windungen erzeugst, ist egal. Von daher kann die > > Erregerunduktivität in einem weiten Bereich liegen. Nochmal diese Frage aufzugreifen.. du hast hatürlich mit der Argumentation recht. Jedoch sind auch im Datenblatt Nennerregerströme gegeben (unter Exciter Data) und die sind meiner Meinung nach verhältnismäßig klein. Bei konstantem Fluß bräuchte ich dann doch eine große Statorinduktivität. Daher--> Die dq0-transformation beschreibt ja, wie die Statorspulen umgerechnet werden, damit sie den gleichen Wert bei einem rotierenden Koordinatensystem haben. Außerdem wird aus den 3 räumlich versetzen Spulen zwei räumlich versetzte Spulen, die senkrecht aufeinander stehen. -->Jetzt rotiert der Stator mit dem Rotor mit. Wenn der Stator mit der gleichen Frequenz wie der Rotor rotiert, steht ja das ganze neue System. Wie bekomm ich dann einen Zusammenhang zwischen induzierter Spannung am Stator bei eigentlich drehendem Rotor. Und welche Aufgabe haben dann die senkrecht aufeinander stehenden Statorwicklungen? Sorry, aber vllt steh aufm Schlauch, wäre aber echt cool, wenn ich das zu 100 Prozent blicken könnte. Gruß und vielen Dank schon im Vorraus
Dan Kübel schrieb: > Nochmal diese Frage aufzugreifen.. du hast hatürlich mit der > Argumentation recht. Jedoch sind auch im Datenblatt Nennerregerströme > gegeben (unter Exciter Data) und die sind meiner Meinung nach > verhältnismäßig klein. Bei konstantem Fluß bräuchte ich dann doch eine > große Statorinduktivität. Da spielen so viele Faktoren wie Luftspaltbreite und sonstige Abmessungen der Maschine eine Rolle, dass es schier unmöglich ist, aus dem Erregerstrom die Erregerinduktivität zu schätzen. Mir ist da nichts geläufig. Der Wert von oben sollte schon stimmen. Dan Kübel schrieb: > Die dq0-transformation beschreibt ja, wie die Statorspulen umgerechnet > werden, damit sie den gleichen Wert bei einem rotierenden > Koordinatensystem haben. Außerdem wird aus den 3 räumlich versetzen > Spulen zwei räumlich versetzte Spulen, die senkrecht aufeinander stehen. Hier bringst Du etwas durcheinander. Die dq-Transformation hat nicht viel mit x_q und x_d zu tun, sondern ist lediglich ein mathematisches Hilfsmittel zur Entkopplung der magnetischen Flüsse. Ein Indiz, dass x_d und x_q nichts mit der dq-Trafo zu tun haben ist das Ersatzschaltbild der Vollpolmaschine von oben. Die hat kein x_q sondern nur ein x_d (bzw. x_q = x_d). Die dq-Transformation kann aber selbstverständlich auch auf eine Vollpolmaschine angewendet werden. x_d und x_q ist über die Namensgebung mit der dq-Trafo verwandt. x_d ist einfach die Induktivität in d-Richtung, also in Richtung des in der dq-Transformation verwendeten Koordinatensystems. x_q analog. Grössen im dq-System kannst Du im Normalfall nicht direkt messen. x_d und x_q einer Schenkelpolmaschine kannst Du aber messen, weil es real vorkommende Grössen sind. Ein Messverfahren funktioniert wie folgt: Die Schenkelpolmaschine wird durch eine Antriebsmaschine auf Nenndrehzahl gebracht, synchronisiert und ans Netz gelegt. Anschliessend wird der Erregerstrom zu Null gebracht. Sorgt man nun durch Verstellen der Drehzahl der Antriebsmaschine dafür, dass der Rotor etwas schneller oder etwas langsamer als das Drehfeld der Maschine umläuft, dann ändert sich ständig die Lage der Polradachse gegenüber dem Drehfeld und damit ändert sich auch der Statorstrom. Er hat, wenn Drehfeld und Polradachse zusammenfallen, seinen kleinsten Wert, und nimmt seinen grössten Wert an, wenn die Polradachse quer zum Drehfeld steht. Stellt man durch Messung neben der Netzspannung U den kleinsten Stromwert Id bei Längsstellung des Polrades und den grössten Stromwert Iq bei Querstellung des Polrades fest, dann kann man die Längsreaktanz als Quotient von Netzspannung und kleinstem Stromwert und die Querreaktanz als Quotient von Netzspannung und grösstem Stromwert berechnen. Bei dem Versuch muss die Erregerwicklung offen sein, damit keine Rotorströme fliessen. >Jetzt rotiert der Stator mit dem Rotor mit. Wenn der Stator einer Maschine zu rotieren beginnt, würde ich das Weite suchen und warten, bis die Maschine ihre eigenen Anschlusskabel abgerissen hat und dadurch zum Stillstand kommt. Ich weiß glaube, was Du sagen wolltest. Du meintest wohl das Statorfeld. >Wie bekomm ich dann einen Zusammenhang zwischen induzierter Spannung am >Stator bei eigentlich drehendem Rotor. Ganz einfach: Der Rotor rotiert und erzeugt das Erregerfeld. Der Stator steht und sieht das vorbeirotierende Erregerfeld. Das gibt eine Induktionsspannung. >Und welche Aufgabe haben dann die senkrecht aufeinander stehenden >Statorwicklungen? Ich gehe davon aus, dass Du hiermit die Zweiachsen (oder dq-) Transformation meinst, bei der man die drei 120° versetzten Statorwicklungen durch zwei um 90° versetzte ersetzt. Die haben die Aufgabe Dir das Rechnen leichter zu machen, indem sie magnetisch voneinander entkoppelt sind und durch ein bisschen Mathematik das gleiche Feld erzeugen können wie die 3 um 120° versetzten Spulen. Man rechnet sich den
Scheinbar ist der letzte Beitrag ein Stück weit abgebrochen. ...Man rechnet sich den Strom in den entkoppelten dq-Spulen aus, den man braucht, um ein gewisses Moment zu erzeugen. Diesen Strom (i_d und i_q) transformiert man dann zurück, um zu erfahren, wie gross die Phasenströme sein müssen.
Hi Daniel, vielen Dank für die ausführliche Antwort. Ich denke, wir kommen der Sache schon näher. Daniel R. schrieb: > Die dq-Transformation hat nicht viel mit x_q und x_d zu tun, sondern ist > lediglich ein mathematisches Hilfsmittel zur Entkopplung der > magnetischen Flüsse. Ich interpretiere das so: Die dq-trafo entkoppelt also den Gesamtfluß, der durch die Erregerwicklung (egal welche position des Rotors) erzeugt wird in eine d und eine q komponente des stators. Das umherlaufende Statormagnetfeld besitzt die achsen d und q. Was ist mit dem Rotor, besitzt der auch die Achsen d-und q (ist ja irgendwie sinnvoll da der rotor ja von 0 bis 360 Grad jede Position annimmt)? Ist die dq trafo das gleiche wie CLark Park zusammen? Sorry, aber das is einfach iwie net klar. gruß und schon mal danke
ps.: Die armature Zeitkonstante ist die des Stators. Habe mir englische Literatur besorgt, unter synchronous generator geschaut. D.h. mir fehlt auf jeden Fall die Induktivität der Erregerwicklung. UNter dieser Short circuit armature time constant kann ich mir jetzt gar nix mehr vorstellen...
> UNter dieser Short circuit armature time constant kann ich mir jetzt gar > nix mehr vorstellen... Vielleicht so: Wenn als Ersatzschaltbild des Stators (?) das von ganz oben genommen wird, zum reellen Widerstand R1 noch einen induktiven L1 hinzufüge, kann ich deren Zeitkonstante nur sinnvoll für den Kurzschlussfall angeben. ?
hmmm.....na ja, Egal, Haben die Dämpferwicklungen eigentlich auch einen Einfluss auf das System hinsichtlich der Regelungstechnik??
Dan Kübel schrieb: > Das umherlaufende Statormagnetfeld besitzt die achsen d und q. Was ist > mit dem Rotor, besitzt der auch die Achsen d-und q (ist ja irgendwie > sinnvoll da der rotor ja von 0 bis 360 Grad jede Position annimmt)? Es spricht nichts dagegen, dem Rotor sein eigenes Koordinatensystem zu geben. Einfacher ist allerdings die Beschreibung ueber den Polradwinkel zwischen Feld und Rotor. Dan Kübel schrieb: > Ist die dq trafo das gleiche wie CLark Park zusammen? Nie gehoert. Google weiss das sicher. Dan Kübel schrieb: > Die armature Zeitkonstante ist die des Stators. Habe mir englische > Literatur besorgt, unter synchronous generator geschaut. Das kann ich kaum glauben. In der Literatur, die ich bisher in den Fingern hatte ist armature = Rotor. Google mal nach Bildern unter "armature motor". Dort habe ich kein Gegenbeispiel gefunden, dass armature der Stator sein sollte. Aber nichts ist unmoeglich.
Daniel R. schrieb: > Das kann ich kaum glauben. In der Literatur, die ich bisher in den > Fingern hatte ist armature = Rotor. Ich war vorher schnell in unserer E-Technik Bibliothek und tatsächlich scheint in englischer Literatur armature den Stator zu bezeichnen. Um Aussagen über englisches Zeug machen zu können, sollte ich also mehr englische statt deutsche Literatur in die Finger nehmen ;) So then...
Nun ja, mir gings genauso, danke für deine Hilfe. Jetzt rückt die BEstimmung der Erregerindukvität (field winding) wieder in weiter Ferne nach meiner Einschätzung. Habe auch in meiner englischen Literatur nichts gefunden, um Induktivitätswerte anhand von Zeitkonstanten zu ermitteln. Die Lösung von oben ist plausibel....aber mit der falschen Zeitkonstante einfach nicht richtig.... Gruß Dan
Warum fragst Du nicht den Hersteller nach einem gescheiten Datenblatt? Die sind da meistens recht unkompliziert.
Joa.....das werd ich dann wohl machen müssen...... Eine weitere Geschichte hätte ich noch zu diskutieren.... Nehmen wir einen Synchrongenerator fremderregt und passiven Gleichrichter, der in einen Zwischenkreis speist. In wie fern spielt die Sättigung der Errergerwicklung eine Rolle, wenn im ZK mal keine Last abgenommen wird? Ein gängiges System wäre ja Generator, Gleichrichter,ZK, Frequenz Umrichter, Asynchronmaschine. Es sind ja auch gesättigte und ungesättigte Werte dem Datenblatt zu entnehmen, wann muss man die gesättigten, wann die ungesättigten nehmen. Gruß und Danke für die Hilfe
@Daniel: nochmal zurückgeschwankt: Die Open Circuit TIme Constant eignet sich natürlich zum bestimmen der Erregerinduktivität. Da im Leerlauf in der Spule des Stators kein Strom fließt, wird der Fluss nur vom Erregerstrom bestimmt. Der TEst zur Bestimmung dieser Zeitkonstante heißt Feldstrom Abklingversuch. Mit dem Erregerwiderstand kann dann die Induktivität bestimmmt werden. Aber die Frage nach der mutual Inductance between Stator and Rotor ist wohl immer noch offen. Über Feedback würd ich mich freuen. gruss dan
Dan Kübel schrieb: > In wie fern spielt die > Sättigung der Errergerwicklung eine Rolle, wenn im ZK mal keine Last > abgenommen wird? Geht es um den Inselbetrieb des Generators? Sättigung tritt grundsätzlich dann auf, wenn die Spannungszeitfläche an einer Induktivität zu gross wird oder wenn ein DC-Strom durch eine Spule zu hoch ist.
Das Gesamtfeld ist nun die Superposition des Rotorfeldes und des Statorfeldes. Was jetzt beim Fehlen des Laststromes passiert, hängt von vielerlei Dingen ab. Der Polradwinkel wird zu 0, womit das Statorfeld in die gleiche Richtung wie das Rotorfeld zeigt. Die Dynamik des Fehlens des Laststroms spielt eine Rolle (fehlt er nur kurz (Bereich der Zeitkonstanten) oder länger etc. Dan Kübel schrieb: > Aber die Frage nach der mutual Inductance between Stator and Rotor ist > wohl immer noch offen. Die Mutual Inductance beschreibt die Kopplung mehrerer Magnetfelder. Sie besagt, wie viel magnetischer Fluss durch die Erregerwicklung fliesst, wenn die Statorwicklung vom Strom I_B durchflossen wird und wegen der Reziprozität gilt dies auch anders herum. Also:
Betrachtet man jetzt eine einzelne Statorwicklung (z.B. die von Phase A) und die Erregerwicklung (die im einfachsten Fall ein Feld in eine Richtung erzeugt), erkennt man, dass die Mutual Inductance der beiden von deren Zwischenwinkel abhängt. Der Fluss der Statorspule kann (abgesehen von einem Streufluss) nur durch die Rotorwicklung fliessen, wenn ihre Fläche eine orthogonale Komponente zum Statorfeld hat. Also gilt mit Vernachlässigung des Streuflusses im stationären Zustand:
In der Realität bekommt man die beiden natürlich nie ganz entkoppelt (wegen Streuflüssen und einer geometrischen Anordnung der Erregerwicklung, die immer eine kleine feldorthogonale Fläche hat). Daher ist die Frage nach der Mutual Inductance wieder mehr eine Definitionsfrage dessen, was das Programm genau haben möchte.
Hi Daniel, Ja es geht um den "INsel-Betrieb" des Generators. Ich modelliere ein Diesel-Elektrisches Antriebskonzept. Dieselmotor treibt Synchrongenerator an, der als "Kraftwerk dient. Im Moment habe ich an den Klemmen des Generators 10kOhm angeschlossen, um die Leerlaufkennlinie zu bestimmen. Das funktioniert im Moment natürlich noch nicht, da ich eben die Mutual INductance nicht bestimmmen kann. Von Simulationssoftwareseite habe ich folgende Formel zur Berechnung bekommen:
LF: field inductance (Rotor) RF: field resistance (Rotor) MF : mutual inductance between stator and rotor rotor. w : electric pulsation Ich habe allerdings nicht den Durchblick, warum man diese Formel verwenden kann. Bzw. wie diese entsteht. Nach der Mutual Inductance aufgelöst gibt das dann:
mit
An sich sind die Abhängigkeiten jetzt so formuliert, dass keine FLüsse, WIndungen usw. vorkommen, sondern das die Induktivität eben über die vorhandenen Daten bestimmt wird. Wenn diese Induktvitäten ausgerechnet werden komme ich auf: Ld=7.95mH Lq=4.96mH LF=T'd0*Rf=0.325H MF=0.0459H Und hier ist dann meiner Meinung nach das Problem, dass die Mutual INductance einen höheren Wert wie Ld hat. Ich kann ja in die Statorspulen höchstens die Statorinduktvität einkopplen? Gruß Dan
Angehängte Dateien:
-

T-ESB.png
31 KB
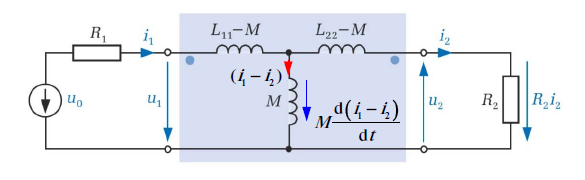
Die Formel für x_d' kommt aus dem Transformator-T-Ersatzschaltbild mit R2=0 (siehe Anhang). Man hat also L11-M in Serie mit der Parallelschaltung aus L22-M und M.
Damit löst sich auch die Frage nach der Definition unter welchem Zwischenwinkel von Erregerwicklung und Statorwicklung das Programm die Mutual haben möchte, nämlich 0°. Dan Kübel schrieb: > Und hier ist dann meiner Meinung nach das Problem, dass die Mutual > INductance einen höheren Wert wie Ld hat. Ich kann ja in die > Statorspulen höchstens die Statorinduktvität einkopplen? Das stimmt so schon. Sieh Dir die Definition der Mutual Inductance in meinem letzten Beitrag nochmal an. Sie sagt aus, wie viel Flussverkettung in der Statorwicklung von einem Strom in der Erregerwicklung verursacht wird. Stell Dir als Beispiel einen idealen Trafo mit Windungsverhältnis N1/N2 = 10/100 vor. In der Wicklung mit 10 Windungen fliesse der Strom I. Dieser Strom erzeugt einen Fluss Phi im Kern, welcher auch durch die Wicklung mit 100 Windungen fliesst. Die Flussverkettung in der Wicklung mit 100 Windungen aufgrund des Stromes in der Wicklung mit 10 Windungen ist also
. Die Mutual-Inductance ist
. Die Flussverkettung in der Wicklung mit 10 Windungen aufgrund ihres eigenen Stroms ist hingegen:
. Die Wicklung mit 100 Windungen sieht also 10 Mal so viel Flussverkettung aufgrund des Stroms in der 10-Windungs.Wicklung als die 10-Windungs-Wicklung selbst. Also ist die Mutual-Inductance grösser als die kleinere der beiden Induktivitäten. Jedoch ist sie kleiner als die grössere der beiden Induktivitäten, da die grössere mit dem Strom I den meisten Fluss erzeugt und auch am meisten Flussverkettung erfährt. Wie ich sehr weit oben schon erwähnt habe, kannst Du die Mutual Inductance (mit Zwischenwinkel von Stator und Rotor von 0°) hiermit berechnen:
. Setze man Deine Werte für L_Stator=7.95mH und L_Erreger=0.325H ein, erhält man mit k=0.9 (wie ich oben auch schon angenommen habe) eine Mutual Inductance von 45.748mH, was Deinem berechnetem Wert sehr nah ist.
Hi Daniel, wieder mal daumen hoch für den Beitrag, jetzt ist mir die ganze Geschichte schon wieder ein Stück weit klarer geworden. Nachdem ich nun definitiv die richtigen Werte habe, bin ich in den SImulator, hab diese Werte eingetragen. Simulation funktioniert nicht und sagt: Inconsistency in inductances parameterization.\nStocked energy may become negative." Daraufhin hat ich dann die Simulatorfirma angemailt, die mir bisher noch eine Antwort schuldig sind. Im C-Code des Modells der Synchronmaschine fand ich dann folgendes:
1 | /* check on coupling matrix determinants for positivity of energy */ |
2 | if (rotorType == 1) |
3 | {
|
4 | logiP = (Ls * Lf - 1.5 * Msf * Msf <= 0.0); |
5 | } |
6 | else if (rotorType == 2) |
7 | {
|
8 | logiP = (Lsd * Lf - 1.5 * Msf * Msf <= 0.0); |
9 | } |
10 | |
11 | if( logiP != 0 ) |
12 | {
|
13 | error = 1; |
14 | amefprintf(stderr, "\nInconsistency in inductances parameterization.\nStocked energy may become negative."); |
15 | } |
Hier wird wohl mit der Formel
mit Ls:selfind.,Lf:fieldinductance, Msf:mutual L between stator and field überprüft,ob die Induktvitäten richtig ausgerechnet worden sind.... Meine Werte eingesetzt in diese Formel ergebn ein negatives Ergebnis (iregendwas -x*10e-4,jednfalls negativ)-->das führt dann dazu, dass das programm in die Fehlerzeile hüpft und die Simulation erst gar nicht startet. Daher die Frage: Woher kommt diese Formel? Auch aus dem Transformator Ersastzschaltbild? Habe dahingehend noch fast nichts gefunden.... Ich vermute, dass das die Kopplungsmatrix beschreibt. d.h. L12,L21 sind mutual inductances und L11,L22 sind Self-inductances. Aber der Faktor 1.5 ist mir irgendwie ein Rätsel. Gruß und schonmal vielen Dank !
Dan Kübel schrieb: > mit Ls:selfind.,Lf:fieldinductance, Msf:mutual L between stator and > field Das ist wohl falsch.......hier die richtigen Konventionen:
1 | T0 reference temperature [degC] |
2 | Rs0 stator winding resistance at reference temperature [Ohm] |
3 | alphaRs corrective coefficient on stator winding resistance [1/K] |
4 | Ls stator cyclic inductance [H] |
5 | Lsd stator cyclic inductance on Park's d axis [H] |
6 | Lsq stator cyclic inductance on Park's q axis [H] |
7 | Rf0 field winding resistance at reference temperature [Ohm] |
8 | alphaRf corrective coefficient on field winding resistance [1/K] |
9 | Lf field winding inductance [H] |
10 | Msf mutual inductance between stator and field [H] |
Dan Kübel schrieb: > Daher die Frage: Woher kommt diese Formel? Auch aus dem Transformator > Ersastzschaltbild? Habe dahingehend noch fast nichts gefunden.... > > Ich vermute, dass das die Kopplungsmatrix beschreibt. d.h. L12,L21 sind > mutual inductances und L11,L22 sind Self-inductances. Aber der Faktor > 1.5 ist mir irgendwie ein Rätsel. Woher diese Formel kommt, kann ich Dir leider auch nicht sagen. Die ist mir noch nie begegnet. Sieht nach der Determinante der Flussgleichungs-Matrix aus, wobei mich ebenfalls der Faktor 1.5 stört. Was ich noch anmerken kann ist folgendes: Die einzelnen Komponenten des Trafo-T-Ersatzschaltbilds sind unter Umständen physikalisch nicht realisierbar. M liegt ja wie gesagt (für Kopplungen nahe 1) zwischen L11 und L22, d.h. eine der beiden Streuinduktivitäten (L11-M oder L22-M) wäre negativ. Das darf so sein und ist auch nicht weiter schlimm, da es ein mathematisches Modell ist, das das Klemmverhalten des Trafos beschreibt. Messbar ist ohnehin nur (L11-M) + M = L11, wenn Du an den Primärklemmen misst oder (L22-M) + M = L22 an den Sekundärklemmen.
Hallo Ihr zwei, ich beschäftige mich mit ähnlichen Themen. Ich hab hier ein gutes Skript, was vielleicht etwas weiter helfen kann und das ein oder andere nochmal erklärt. http://www.iee.uni-hannover.de/lehrange/Skripte/oswald/EE1/Generator.pdf Man transformiert die Statorgrößen ins rotierende Rotorsystem, damit man eine Synchronmaschine (SM) einfacher regeln kann, ähnlich der Regelung der Gleichstrommaschine. Mit Hilfe der dq Transformation zerlegt man das Feld im Luftspalt in eine Komponente die den Fluss kontrolliert, das ist die d Komponente und die q Komponente ist für das Drehmoment verantwortlich. So kann man eine SM regeln wie eine Gleichstrommaschine. Ich hänge gerade auch an den winkelabhängigen Induktivitäten, versuche das in mein Modell zu integrieren. Allerdings arbeite ich mit Matlab/Simulink, wo ich alle Modelle von grundauf aufbaue. Mir fehlen auch die Daten für die Maschinengrößen, Induktivitäten usw. Ein paar wenige Daten habe ich, sodass das Modell der permanenterregten SM schon läuft. Die dq Transformation heißt auch Park Transformation. Ich hoffe ich konnte etwas Licht bringen. Liebe Grüße Sabine
Sabine B. schrieb: > Man transformiert die Statorgrößen ins rotierende Rotorsystem, damit man > eine Synchronmaschine (SM) einfacher regeln kann, ähnlich der Regelung > der Gleichstrommaschine. stimm ich zu Mit Hilfe der dq Transformation zerlegt man das > Feld im Luftspalt in eine Komponente die den Fluss kontrolliert, das ist > die d Komponente und die q Komponente ist für das Drehmoment > verantwortlich. Das is etwas schwammig. Die Transformiererei in eine d und q komponente macht nur beim Schenkelpolläufer Sinn. Beim Vollpolläufer sind d und q Komponente gleich. Warum? Unter Belastung ( Lastwinkel ungleich null) und z.B. im generatorischen Betrieb hinken die Erregerfeldlinien des Rotors unter einem gewissen Winkel der d achse hinterher. Um dies beschreiben zu können, wählt man die d und q achse als Bezugssystem, was in Georg Andresen Simulation auch sehr gut zu sehen ist. Warum das Moment auf der q-achse zu finden ist, weiss ich nicht ( hängt wohl mit irgendeiner kreuzprodukt multiplikation zusammen). Die Reaktanzen bzw. Induktvitäten sind meiner Meinung nach virtuell. So ist hier eine induktvität eher als Fluss pro Ampere definiert ( der sich ja über die 360 Grad dann auch ändert). Respekt für die Modellierung anhand von Signalflüßen, dazu musst du ja Gleichungssystem (nichtlinear) der Synchronmaschine verwenden. Wobei das ja in Dirk Schröder Elektrische Antriebe schon gelöst ist. Was mich irgendwie auch noch verwirrt, Werden die Statorgrößen auch mit d q Componenten in Rotorgrößen transformiert oder wird jeder 120 Grad verschobene Strang ins Rotorsystem transformiert. Die Clarke Transformation macht ja aus 3 Wicklungen 2 rechtwinklige. Gruß
dan schrieb: > Das is etwas schwammig. Die Transformiererei in eine d und q komponente > macht nur beim Schenkelpolläufer Sinn. Beim Vollpolläufer sind d und q > Komponente gleich. Vorsicht. Bei der Vollpolmaschine sind x_d und x_q gleich. Die d- und q-Ströme (bzw. die Flüsse) müssen aber keinesfalls gleich sein. An Sabine's Aussage gibt es nichts auszusetzen. Der d-Strom ist für den Fluss verantwortlich, der q-Strom fürs Drehmoment. Das geht bei Vollpol- Schenkelpol- und Asynchronmaschinen. Das ganze Geheimnis dahinter ist ja nichts weiter, als dem Regler das Leben leichter zu machen und ihm zwei DC-Grössen zu geben anstatt 3 Wechselgrössen. Das würde auch gehen, ist aber viel komplizierter. Also rechnet man aufgrund des Moments, das man gerade braucht, den d- und q-Strom aus, setzt den Regler darauf an, transformiert nach der Regelung zurück und füttert damit seinen Umrichter. Der Regler hat (im stationären Betrieb der Maschine) also eine konstante Grösse, auf die er regeln muss. Ohne die dq-Transformation müsste er auf einen Sinus regeln. >Die Reaktanzen bzw. Induktvitäten sind meiner Meinung nach virtuell. Nein sind sie nicht. Das sagte ich bereits und habe Dir sogar eine Messmethode beschrieben. Etwas Messbares kann nicht virtuell sein und anders herum. Du brauchst dringend ein gutes Buch über die dq-Transformation. Das Verständnis scheint noch nicht da zu sein. Dahingehend kann ich Dir nicht weiterhelfen. Ich habe lediglich mein Vorlesungsskript in dem die Thematik sehr einleuchtend beschrieben ist. Das Skript existiert aber nur als Hardcopy.
Hi Daniel, sicherlich fehlen mir leider noch einige Grundlagen. Zur Schenkelpolmaschine und Drehmoment: Hab das jetzt nachgekuckt. Liegt am Strombelag des Polrads. D.h. durch den Erregerfluss wird ein Strom induziert, mithilfe der Lorentzregel sieht man dann, dass die momentbildende Kraftwirkung rechtwinklig zur Symetrieachse des Polrads (d-achse) ist---> das ist dann die q-achse. passt Dirk Schröder Grundlagen Antriebstechnik---> Deine Erklärung mit d-strom und q-strom find ich iwie komisch, da ja nach der Lorentzregel die Kraftachse rechtwinklig zur Stromachse ist?? Weiterhin: Betrachtet man Georg Andresen, dann sieht man,d ass der Lastwinkel zwischen der d-achse und der erregerfeldlinien ist. Die Erregerfeldlinien in d und q komponente aufzuteilen, find ich logisch. Aber Warum nen Strom in d und q komponente aufteilen, versteh ich net. zum Verständnis der dq0-trafo. Allerdings find ich das langsam sehr nervig, dass mir das nicht 100 Prozent klar ist. An den Büchern liegts nicht, eher an der Vorstellung. Aber ich werds hoffentlich noch irgendwann blicken. Gruß und trotzdem danke
Angehängte Dateien:
-

dq_Zeigerbild_ohne_d.png
4,8 KB -

dqZeigerbild_mit_d.png
6,4 KB
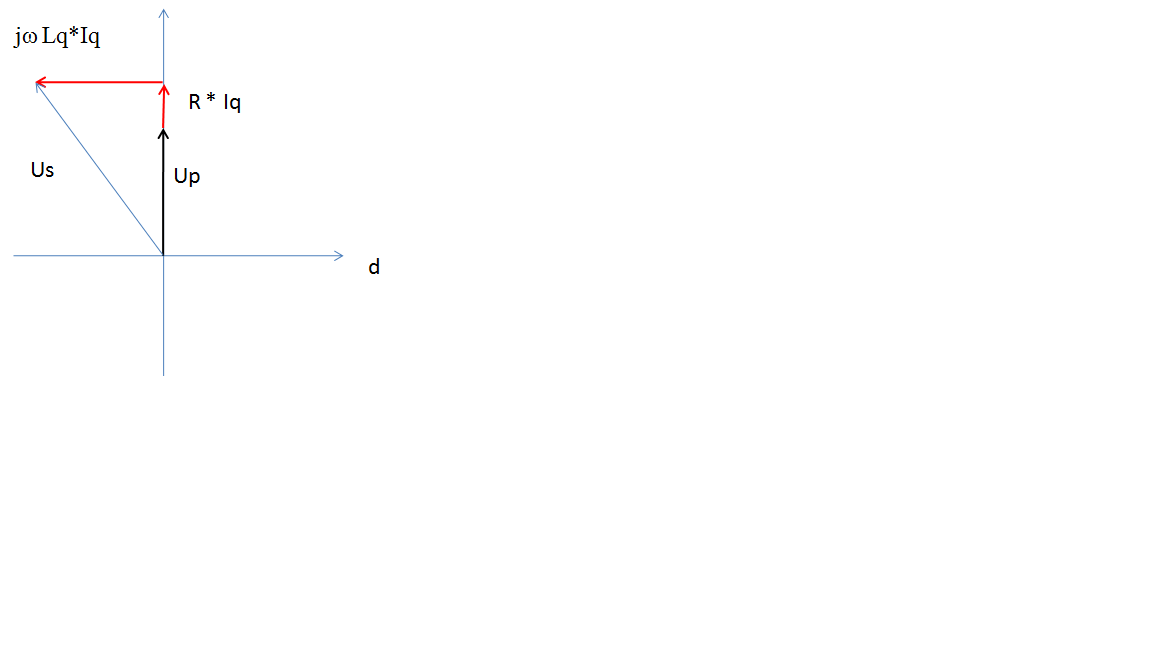
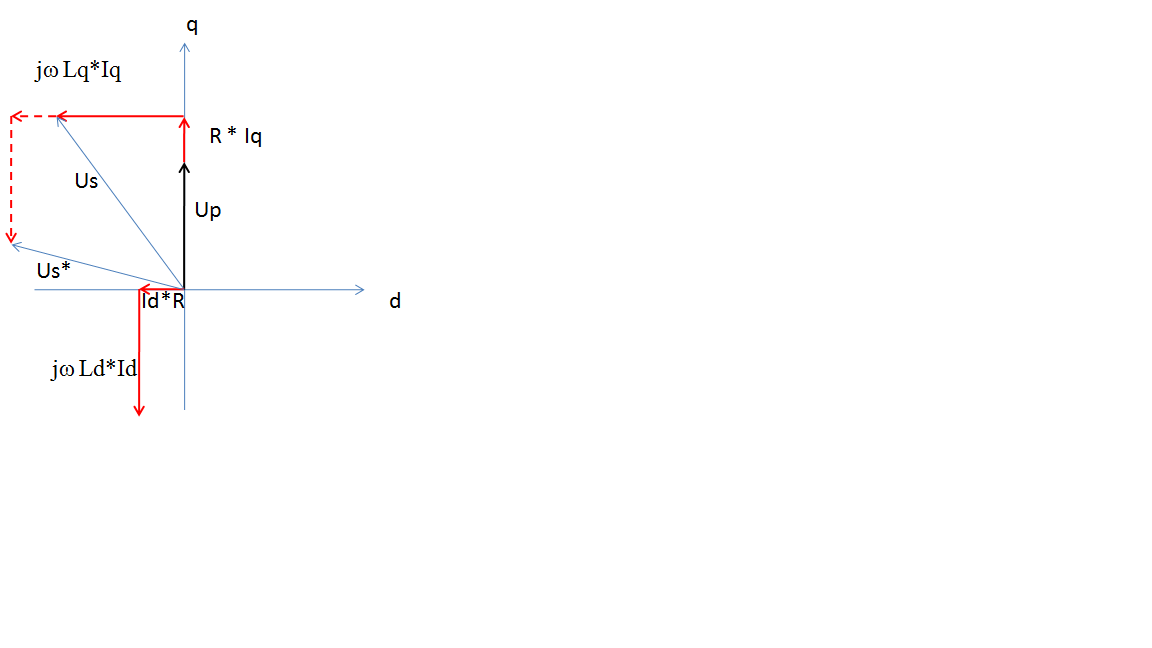
Hallo, hab mal zwei Zeigerbilder angehängt zur Verdeutlichung. Also ganz von vorn: dq Transformation wird gemacht um aus Wechselgrößen Gleichgrößen zu machen. Gleichgrößensysteme lassen sich leichter regeln und aufbauen. Gleichstrommaschine: Ankerstrom regelt das Moment Feldschwächbetrieb macht man, wenn man höhere Drehzahlen erreichen möchte Dieses Regelprinzip möchte man bei der Regelung der Synchronmaschine auch anwenden. Also hat sich mal jemand Gedanken gemacht, das war so in den 60er Jahren. Der kam auf die glorreiche Idee aus dem 120° versetzten Drehstromsystem ein rechtwinkliges drehendes System zu machen. Man muss nicht zwangsläufig immer erst Clark und dann Park Transformation machen, man kann auch direkt von abc (uvw) ins dq Modell transformieren. Die 120° versetzten Spannungen, Stöme oder was auch immer sind raumfest auch statorfest genannt, transformierst Du das ins dq System, dann transformierst Du das in ein System, das sich mit dem Rotor dreht. Dadurch erhälst Du automatisch Gleichgrößen. Es ist etwas abstrakt, aber auch genial!!! Id wird in der Regel zu null geregelt. Iq macht mit dem Fluss das Drehmoment, das wird übers Kreuzprodukt gerechnet. Bekommt Id einen Wert wird die Klemmenspannung kleiner. Mit Id kann man den Feldschwächbetrieb realisieren, wenn die Maschine zum Beispiel zu schnell läuft und an den Klemmen die Spannung zu hoch wird, die zum Beispiel über Umrichter in einen Zwischenkreis geht und dieser natürlich nur für einen bestimmte Spannungsbereich ausgelegt ist. Das Ld und Lq bei Schenkelpolmaschinen unterschiedlich sind, hängt mit der Geometrie des Rotors zusammen, die Vollpolmaschine ist ein nahezu symmetrischer Zylinder, so dass Ld und Lq gleich sind. Ganz deutlich wird die Vorstellung bei der Schenkelpolmaschine mit Polpaarzahl 1, dann sieht man schon, das Ld und Lq nicht gleich sein können. Zum armature nochmal was, das heißt Anker und der Anker ist immer das was sich dreht.
Angehängte Dateien:
-

Andresen.PNG
31 KB
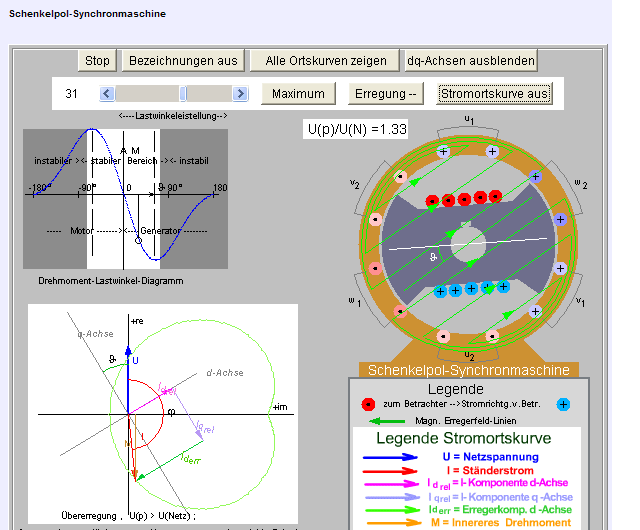
> dq Transformation wird gemacht um aus Wechselgrößen Gleichgrößen zu > machen. Gleichgrößensysteme lassen sich leichter regeln und aufbauen. Ja, das Ziel der Trafo ist mir klar. > Gleichstrommaschine: > Ankerstrom regelt das Moment > Feldschwächbetrieb macht man, wenn man höhere Drehzahlen erreichen > möchte auch klar > > Dieses Regelprinzip möchte man bei der Regelung der Synchronmaschine > auch anwenden. > > Also hat sich mal jemand Gedanken gemacht, das war so in den 60er > Jahren. > Der kam auf die glorreiche Idee aus dem 120° versetzten Drehstromsystem > ein rechtwinkliges drehendes System zu machen. > Man muss nicht zwangsläufig immer erst Clark und dann Park > Transformation machen, man kann auch direkt von abc (uvw) ins dq Modell > transformieren. --> dq-Transformation = Clarke-Park Transformation, auch klar... > Die 120° versetzten Spannungen, Stöme oder was auch immer sind raumfest > auch statorfest genannt, transformierst Du das ins dq System, dann > transformierst Du das in ein System, das sich mit dem Rotor dreht. > Dadurch erhälst Du automatisch Gleichgrößen. Genau hier endet meine Vorstellungskraft. Meine Interpretation: Die um 120 Grad raumversetzten Spulen werden durch die dq-Transformation durch zwei rechtwinklige sich mit der Rotorfrequenz drehenden SPulen ersetzt. Wo bleibt die Erregerwicklung (bzw. wird die Erregerwicklung mit der SPule auf der d-achse verrechnet??)??? > Id wird in der Regel zu null geregelt. Iq macht mit dem Fluss das > Drehmoment, das wird übers Kreuzprodukt gerechnet. Bekommt Id einen Wert > wird die Klemmenspannung kleiner. Ich denke hier die ganze Zeit an das Bild der Schenkelpolmaschine von georg andresen. Dort ist die d-achse ja parallel zu den Schenkelpolen. Unter Last gibt es einen entstehenden Lastwinkel zwischen d-achse und dem "nacheilenden" Erregerfeld. Unter diesem Lastwinkel gibt es also auch ein magnetisches Erregerfeld auf der q-achse. Magnetisches Feld hat Fluss zur folge--> Fluss induziert eine SPannung in den Statorwicklung, und unter Last fließt dann ein Strom. das Drehmoment ist hier eigentlich auch nicht auf der q-achse (was mich verwirrt) Ist das der physikalische Hintergrund. Wie gesagt, einfach mal Generatorbetrieb bei Georg andresen Schenkelpolmaschine anschauen, und aktuelle Ortskurve zeigen lassen. UNd die Sache mit Armature, habe drei Bücher, zwei von IEEE-Press, eins Fitzgerald, Electric Machinery ---> z.B. Seite 262 Example 5.4 .... From short circuit characterstic armature current, A: 118 A Field current: 2.2 A .... Field winding --> 10000%ig Erregerwicklung armature--> Entweder Ausschlussverfahren :-) oder klarer Verstand Trotzdem vielen Dank für die Bemühungen. Über eine Antwort würd ich mich wieder sehr freuen. Gruß Dan ps.: Ich habe dieses andresen Bild mal angehängt (die maschine läuft im Rechtslauf
Hallo zusammen, Ich muss meine Aussage bezüglich des Ankers berichtigen, ich zitiere: ...nur dort werden im stationären Betrieb Spannungen induziert, so dass dieses Hauptelement eindeutig als Anker angesprochen werden kann... Damit ist in der SM der Ständer gemeint. Die Induktivitäten beschreiben doch immer nur die Flussverkettungen, man hat in der SM im Ständer ja keine einzelnen drei Spulen, sondern verteilte Wicklungen, die Spulen sollen das Verhalten der Flussverkettungen symbolisieren, um es leichter vorstellbar zu machen und zu vereinfachen. So ist das mit Lq und Ld auch, sie symbolisieren Teile der Flussverkettungen, dabei unterteilt man die Flussverkettung so wie man sie haben möchte. Einmal in Richtung der d-Achse und einmal in der q-Achse. Um das Feld der Durchflutungswelle zu bestimmen, zerlegt man die Welle anhand der magnetischen Symmetrieachse des Polrades, man erhält so die Längs- (d) Komponente und Quer- (q)Komponente, d liegt mittig auf dem Schenkel und q genau zwischen den Schenkeln. Das Moment wird ja aus dem Kreuzprodukt zwischen Erregerfeld und Iq gebildet, Iq ist ja der Teil des Stromes der rechtwinklig auf dem Fluss steht. Das obrige war nicht verkehrt!!! Manchmal braucht man etwas um sich eine Vorstellung zu machen, was in der Maschine passiert und warum man was macht. Die Frage nach der Erregerinduktivität ist gut, da hatte ich mir auch noch nicht so das Bild von gemacht, bin aber noch am lesen... aber eigentlich würde sie mit auf die d Achse gehören, aber da durch die Erregerspule ja nur ein Gleichstrom fließt, kann man sie glaub ich erstmal rauslassen aus den rotierenden Geschichten, sie "lädt " sich einmal auf und sonst passiert mit der Erregerwicklung ja nix, die Induktivitäten die die Verkettung repräsentieren dagegen sind ja zeitlich veränderlich, also abhängig von der Lage des Polrades und von der Form des Polrades. LG
Hallo nochmal diese Zerlegung in zwei rechtwinklig aufeinanderstehende Größen, darfst Du Dir nicht räumlich vorstellen, sondern ehr wie in Richtung komplex... Bei der zweipoligen SchenkelpolSM kann man sich das noch so vorstellen, aber mit höherer Polpaarzahl geht das nicht mehr!!!
Hmmm, ok.: Ein Problem gibts jetzt noch.....schenkelpolmaschine: 1.) Der Rotor hat bei einer Polzahl von 6 auch 6 pole bzw. 3 Polpaare, der Stator hat ebenfalls 6 Polpaare oder 2.) Der Rotor hat bei einer Polzahl von 6 1 Polpaar auf dem Rotor, und 3 Pol Paare auf dem Ständer. --> Hab dazu in keiner Literatur eine eindeutige Aussage gefunden, ich tippe jedoch auf Antwort 1... Hat jemand dazu noch die Lösung :.-)
Hey, also Schenkelpolmaschine heißt, dass das Polrad bzw. Rotor aufgeprägte Pole besitzt. In diesem Sinne hat der Ständer keine Pole. Erklär nochmal bitte, wie Du Deine Frage meinst. LG Sabine
Dan Kübel schrieb: > 1.) > Der Rotor hat bei einer Polzahl von 6 auch 6 pole bzw. 3 Polpaare, der > Stator hat ebenfalls 6 Polpaare Richtig. Sabine B. schrieb: > also Schenkelpolmaschine heißt, dass das Polrad bzw. Rotor aufgeprägte > Pole besitzt. In diesem Sinne hat der Ständer keine Pole. Erstens: Die Polpaarzahl ist nicht nur eine Eigenschaft von Schenkelpolmaschinen. Auch Vollpolmaschinen haben Polpaare. Einziger Unterschied: sie sind nicht im Eisen ausgeprägt sondern sie sind eine Eigenschaft des Feldes, die durch spezielles Bewickeln des Rotors entsteht. Zweitens: Selbstverständlich hat auch das Statorfeld Polpaare. Wie sollte sich denn sonst der Rotor mit dem Statorfeld synchronisieren? Grundlagen Grundlagen Grundlagen...
Hi Sabine, Daniel, Danke für die Beantwortung. War mir einfach nicht sicher. Mir ist im allgemeinen schon klar, was die Polpaarzahl ist. Bloß bei Schenkelpolmaschinen war ich mir, keine AHnung warum, unsicher. Wenn mir mal wieder dumme Fragen einfallen, werd ich se trotzdem stellen, gibt ja immer wieder nette Leute, die diese beantworten. Gruß
Hallo zusammen, ich hatte mich etwas unglücklich ausgedrückt mit den Polen des Ständers, ich hatte ausgeprägte Pole im Hinterkopf, wie beim Schrittmotor... Ich meinte damit nicht, dass der Ständer gar keine Pole besitzt.
Angehängte Dateien:
-

ESB.PNG
12 KB

{kind=link}
Hi zusammen, Ich Anfänger habe nochmal eine Frage bezüglich meines ANhangs. Darin befindet sich ein Ersatzschaltbild zur Bestimmung der verschiedenen Induktivitäten. D-achse sowie q-achse sind getrennt aufgeführt. --> klar Im ESB sind unter anderem Dämpferwicklungs L und R aufgeführt (rDq, rdD,...) aufgeführt. Diese sind im vorliegenden Synchrongenerator nicht vorhanden, da im Inselbetrieb eingesetzt. Die Frage zum Ersatzschaltbild ist folgende: d-achse: --> Der Magnetisierungsstrom der D-achse ist doch der Strom durch die Hauptinduktivität und setzt sich aus I_m=I_ra-I_rf (ohne Dampferwicklung) zusammen ? --> d.h. der Strom durch die Streuinduktvität der Erregerwicklung wird sozusagen nicht dazu benutzt, um Fluss für die Statorwicklung zu erzeugen. Der Strom I_ra ist doch eigentlich der Strangstrom?? und beim Generatorbetrieb fließt der doch in die Klemmen rein. Wie passt das mit der Magnetisierungsindukvität xhd zusammen. Logisch wäre es rein vom ESB für mich, wenn der Strom in die Parallelschaltung hineinfließt, und sich dann in einen Streuanteil und einen "Wirkanteil" aufspaltet. WIe falsch bin ich bzw, Welche Spannung wird an den Klemmen angelegt? Danke schon für eure Hilfe und ein schönes We! Gruß Dan
kibl schrieb: > Bin ich schon wieder zu tief in den Grundlagen? :-) Eher verstehe ich die Frage(n) nicht. Ich versuchs mal. Dan Kübel schrieb: > Im ESB sind unter anderem Dämpferwicklungs L und R aufgeführt (rDq, > rdD,...) aufgeführt. Diese sind im vorliegenden Synchrongenerator nicht > vorhanden, da im Inselbetrieb eingesetzt. Hat der Generator keine (glaube ich nicht) oder glaubst Du, sie sei unwirksam wegen dem Inselbetrieb? Auch im Inselbetrieb ist die Dämpferwicklung sehr wichtig. Wenn sich die Last ändert, bekommst Du Oszillationen, die die Dämpferwicklung sehr wirksam abklingen lässt. Dan Kübel schrieb: > Der Magnetisierungsstrom der D-achse ist doch der Strom durch die > Hauptinduktivität Richtig. > und setzt sich aus I_m=I_ra-I_rf (ohne Dampferwicklung) zusammen ? Nein. I_m = -I_ra - I_rf Dan Kübel schrieb: > d.h. der Strom durch die Streuinduktvität der Erregerwicklung > wird sozusagen nicht dazu benutzt, um Fluss für die Statorwicklung zu > erzeugen. Genau das ist die EIgenschaft von Streuinduktivitäten. Dan Kübel schrieb: > Der Strom I_ra ist doch eigentlich der Strangstrom?? und beim > Generatorbetrieb fließt der doch in die Klemmen rein. Richtig. Dan Kübel schrieb: > Wie passt das mit der Magnetisierungsindukvität xhd zusammen. > Logisch wäre es rein vom ESB für mich, wenn der Strom in die > Parallelschaltung hineinfließt, und sich dann in einen Streuanteil und > einen "Wirkanteil" aufspaltet. Verstehe ich nicht. Welche Parallelschaltung von was? Dan Kübel schrieb: > WIe falsch bin ich bzw, Welche Spannung wird an den Klemmen angelegt? An den Klemmem liegt die Differenz der Polradspannung und dem Spannungsabfall über der Maschinenimpedanz.
Hi Daniel, danke für deine Antwort. > Hat der Generator keine (glaube ich nicht) oder glaubst Du, sie sei > unwirksam wegen dem Inselbetrieb? > Auch im Inselbetrieb ist die Dämpferwicklung sehr wichtig. Wenn sich die > Last ändert, bekommst Du Oszillationen, die die Dämpferwicklung sehr > wirksam abklingen lässt. Pendelschwingungen treten bei Betrieb am starren Netz insbesondere wenn der Zuleitungswiderstand groß ist bzw. die Frequenzen klein (z.B. 16 2/3Hz), auf. Bei Dieseltraktion Inselbetrieb vor, somit keine selbsterregten Pendelschwingungen. Deswegen ist der Einsatz einer Dämpferwicklung sinnlos und würde nur die Kommutierungsverluste (GR-Last) vergrößern. Zum Ersatzschaltbild: >> und setzt sich aus I_m=I_ra-I_rf (ohne Dampferwicklung) zusammen ? > > Nein. I_m = -I_ra - I_rf > --> Mit Stromkonventionen,ja, ich meinte es eher physikalisch: Der Magnetisierungsstrom stellt sich zusammen aus dem Feldstrom, der den Magnetisierungsfluss erzeugt MINUS einem Streuanteil. >> Der Strom I_ra ist doch eigentlich der Strangstrom?? und beim >> Generatorbetrieb fließt der doch in die Klemmen rein. Das Ersatzschaltbild soll bei mir folgenden Nutzen erfüllen: Ich möchte den Tatsächlichen Magnetisierungsstrom über das Ersatzschaltbild herausfinden. Deswegen möchte ich das Ersatzschaltbild "bestromen". Wie aber mach ich das bei Generatorbetrieb? Mit ner Stromquelle? > Verstehe ich nicht. Welche Parallelschaltung von was? Der Strom bei Generatorbetrieb im Obigen ESB ist +I_ra. Er setzt sich sozusagen aus Magnetisierungsstrom (xhd) + Streuinduktvität Strom I_rf zusammen. MIr fehlt da die physikalische INterpretation. Eigentlich müsste doch noch die Erregerwicklung als "Flussquelle" oder so dargestellt sein? > > An den Klemmem liegt die Differenz der Polradspannung und dem > Spannungsabfall über der Maschinenimpedanz. ok...nehmen wir an, ich hab ne OHmsch, induktive Last.... somit einen gewissen Lastwinkel und einen cos phi. 1.) Was is die Maschinenimpedanz? bzw. woher weisst du das, ich hab schon echt viel Literatur durchgeschaut, zu diesem ESB aber nichts gefunden. Gruß und danke für die RÜckmeldung!
Dan Kübel schrieb: > Hi Daniel, > danke für deine Antwort. > >> Hat der Generator keine (glaube ich nicht) oder glaubst Du, sie sei >> unwirksam wegen dem Inselbetrieb? >> Auch im Inselbetrieb ist die Dämpferwicklung sehr wichtig. Wenn sich die >> Last ändert, bekommst Du Oszillationen, die die Dämpferwicklung sehr >> wirksam abklingen lässt. > > Pendelschwingungen treten bei Betrieb am starren Netz insbesondere wenn > der Zuleitungswiderstand groß ist bzw. die Frequenzen klein (z.B. 16 > 2/3Hz), auf. Bei Dieseltraktion Inselbetrieb vor, somit keine > selbsterregten Pendelschwingungen. Deswegen ist der Einsatz einer > Dämpferwicklung sinnlos und würde nur die Kommutierungsverluste > (GR-Last) vergrößern. > Mit dieser Antwort wäre ich vorsichtig. Der Dämpferkäfig spielt auch eine wichtige Rolle bei Schieflast der Maschine. Nebenbei: Wir haben in der Firma einen Prüffeldumformer von 30MVA. Der wird hauptsächlich bei der Prüfung grosser Kompensations- drosseln eingesetzt, also Inselbetrieb. Gegenüber "normalen" Synchronmaschinen hat dieses Polrad einen deutlich grösser dimensionierten Dämpferkäfig(mehr Stäbe pro Polschuh). mfg
Frank Xy schrieb: > Nebenbei: > Wir haben in der Firma einen Prüffeldumformer von 30MVA. > Der wird hauptsächlich bei der Prüfung grosser Kompensations- > drosseln eingesetzt, also Inselbetrieb. > Gegenüber "normalen" Synchronmaschinen hat dieses Polrad einen > deutlich grösser dimensionierten Dämpferkäfig(mehr Stäbe pro Polschuh). Hi Frank, ich finds echt super, dass die Profis sich hier beteiligen. Für mich ists einfach brutal schwer, da ich noch keine tiefere Erfahrung mit Synchronmaschinen gemacht habe. Aber nochmal: definitiv, der Generatorhersteller hat mir geschrieben, dass keine Dämpferkäfige vorhanden sind. ---> In wie fern gibts dann PRobleme bzw. gibts gute Gründe bei Inselbetrieb die Dämpferkäfige wegzulassen? -->konkret: Dieselmotor-> Synchrongenerator--> Gleichrichter--> Zwischenkreis-->irgendein Leistungsprofil Danke für die Tips !!!
Dan Kübel schrieb: > Pendelschwingungen treten bei Betrieb am starren Netz insbesondere wenn > der Zuleitungswiderstand groß ist bzw. die Frequenzen klein (z.B. 16 > 2/3Hz), auf. Das solltest Du nochmals überdenken. Dan Kübel schrieb: > Ich möchte > den Tatsächlichen Magnetisierungsstrom über das Ersatzschaltbild > herausfinden. Dann schau, welche Spannung über Deiner Magnetisierungsinduktivität anliegt, und rechne ihn aus. In Deinem ESB von oben fehlt die Polradspannung. Dan Kübel schrieb: > Deswegen möchte ich das Ersatzschaltbild "bestromen". Wie > aber mach ich das bei Generatorbetrieb? Mit ner Stromquelle? Verstehe ich nicht. Meinst Du die Erregung? Bitte deutlicher ausdrücken. Ich habe keine allzu grosse Lust auf ein Ratespiel. Dan Kübel schrieb: > MIr fehlt da die physikalische INterpretation. Eigentlich > müsste doch noch die Erregerwicklung als "Flussquelle" oder so > dargestellt sein? Die Polradspannung fehlt. Das Polrad induziert diese Spannung in die Statorwicklungen. Dazwischen hängt die Maschinenreaktanz. Dan Kübel schrieb: > ok...nehmen wir an, ich hab ne OHmsch, induktive Last.... somit einen > gewissen Lastwinkel und einen cos phi. > 1.) Was is die Maschinenimpedanz? bzw. woher weisst du das, ich hab > schon echt viel Literatur durchgeschaut, zu diesem ESB aber nichts > gefunden. Sieh Dir mein zweites Posting mit dem ESB an. Die Maschinenimpedanz ist j*x_d + R_1 (für eine Vollpolmaschine). Meistens vernachlässigt man jegliche Wirkwiderstände, womit die Maschinenimpedanz j*x_d ist. Die Last hat natürlich Einfluss auf Deine Klemmenspannung, jedoch nicht auf die Polradspannung. Diese ist durch das Induktionsgesetz gegeben und ist lastunabhängig (vorausgesetzt die Drehzahl und Erregung bleiben gleich). Die Lastabhängigkeit der Klemmenspannung siehst Du in den Extremfällen Leerlauf und Kurzschluss sehr gut. Im Leerlauf (keine elektrische Last) ist die Klemmenspannung gleich der Polradspannung, da kein Strom fliesst und deshalb auch keine Spannung über der Maschinenreaktanz abfallen kann. Im Kurzschlussfall ist die Klemmenspannung = 0. D.h. die Polradspannung fällt über der Maschinenreaktanz ab. Dan Kübel schrieb: > In wie fern gibts dann PRobleme bzw. gibts gute Gründe bei > Inselbetrieb die Dämpferkäfige wegzulassen? Das kann je nach Last (über die Du uns noch nichts verraten hast) Probleme geben... in der Tat. Gute Gründe sie wegzulassen (von finanziellen abgesehen) fallen mir nicht ein.
Hi, Um dem Raten ein Ende zu machen. Der vorliegende Generator soll als Leistungswandler von mechanischer in elektrische Leistung dienen. Die Drehzahl kommt von einem Diesel-Motor, der wohl auch Momentenschwankungen beinhaltet. Über passive Gleichrichter gehe ich dann auf einen Zwischenkreiskondensator. Am Zwischenkreis soll immer die gleiche Spannung über ne PI-Regelung herrschen und als Last dient eine Leistungsquelle, die auch unstetigkeiten (sprünge und so ) beinhaltet. Selbstanlauf ist deswegen nicht gefordert. Untersuchen werd ich dabei die Rückwirkungen des Generators auf den Dieselmotor bei einem gewissen Leistungsprofil nach dem Zwischenkreis. Mit der Modellierung bin ich soweit fortgeschritten, dass anhand des Ersatzschaltbildes von oben alle Parameter über die pu Umrechnung gemacht werden konnten. Die Kurzschlusskennlinie sowie die Leerlaufkennlinie kann ich gut den Datenblattangaben nachstellen. Beim Wirkungsgrad der Maschine hab ich folgendes gedacht: die mechanische Leistung entspricht wohl auf der Elektrischen Seite der Wirkleistung. dann berechnet sich der WIrkungsgrad bei Nennbelastung auf mü=P_el*cos(phi)/M/omega mit M=Drehmoment, omega= Winkelgeschwindigkeit mechanisch die Referenzimpedanz berechnet sich aus der Strangspannung= Außenleiterspg./sqrt(3) sowie dem Strangstrom und der Leistung pro Strang = 590kVA/3 Heute hab ich die im Ersatzschalbild verwendeten Parameter (inklusive Dämpferparameter :-) ) berechnet, wo ich dann erstmals auf die richtige Kurzschluss und Leerlaufkennlinie gekommen bin. Ich hoffe, ihr könnt euch jetzt vorstellen, was so genau passiert. und zur Dämpfergeschichte: Da werd ich den Geno-Hersteller nochmal anhauen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.