
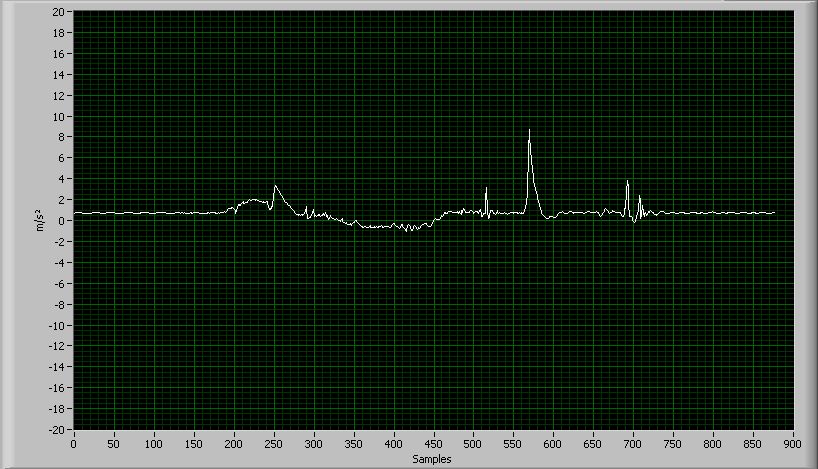
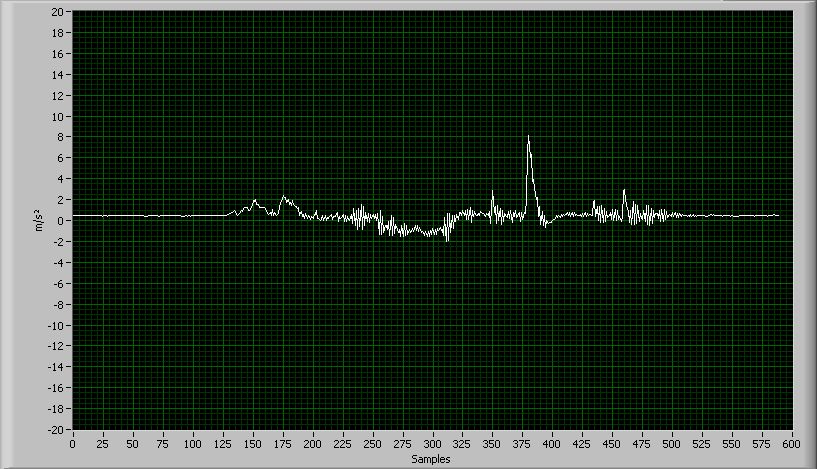
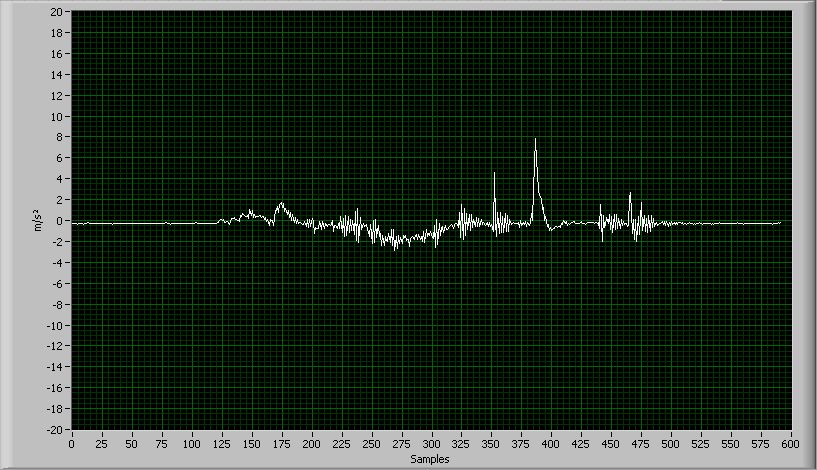
Hallo zusammen, ich habe 3 verschiedene Beschleunigungssensoren (Foto Aufbau.jpg von links nach rechts: LIS3LV02DL,LIS3DH,LIS331DLH) auf eine Lochrasterplatine aufgebaut. Diese Lochrasterplatine wird auf eine Art Motherboard aufgesteckt, auf dem ein µC sitzt der die Kommunikation übernimmt. Die Beschleunigungssensoren werden über SPI konfiguriert bzw. ausgelesen. eingestellte Abtastraten: -LIS3LV02DL:160Hz -LIS3DH:100Hz -LIS331DLH:100Hz Die Diagramme (LIS3LV02DL.jpg,LIS3DH.jpg,LIS331DLH.jpg) zeigen die Beschleunigungswerte einer Vor-/Rückwärtsbewegung. (z-Achse in Bewegungsrichtung) Mir ist aufgefallen, dass bei den Sensoren LIS3DH und LIS331DLH die Werte ein "Rauschen" aufweisen, während beim LIS3LV02DL saubere Werte ausgelesen werden. Dieses Rauschen tritt aber nur während der Bewegung auf, im Ruhezustand sind die Werte auch sauber. Die Sensoren wurden laut Datenblatt beschalten (einzige Änderung: 100µF statt 10µF). Kann sich jemand erklären, warum bei 2 Sensoren das Signal "verrauscht" und bei einem Sensor sauber ist? Wenn der Aufbau schuld sein sollte, dann müsste doch bei allen 3 Sensoren die Signale gleich sein. Könnte der interne Aufbau der Sensoren Schuld sein? (LIS3DH und LIS331DLH sind "low power") Ich bin für jeden Hinweis dankbar. Wenn ihr zusätzlich Info benötigt bitte einfach Bescheid geben. Gruß Christian
Angehängte Dateien:
-

Aufbau.jpg
45 KB -

LIS3LV02DL.jpg
98 KB -

LIS3DH.jpg
100 KB -

LIS331DLH.jpg
100 KB
Hi, Christian, was sagen denn die Datenblätter der Sensoren über Empfindlichkeit, Skalierung - und vor allem über das Tiefpassverhalten des Sensors? Ansonsten: Jeder Sensor rauscht. Ein Sensor ohne Rauschen ist kaputt oder hat keinen Strom. Ciao Wolfgang Horn
Wenn das auf den Platinchen die einzige Elektronik ist: Mach einen aktiven Tiefpass dahinter. Und nimm wirklich nur die Frequenzen, die Du wirklich brauchst. Die LIS-Sensoren sind eigentlich recht gut. Es gibt viele ANDERE s.g. Beschleunigungssensoren, die eher die Bezeichnung Rauschgenerator verdienen wuerden. Bedenke bei Deinem Aufbau, dass der Sensor nahezu keine Masse hat. Wenn in 100km ein Zug vorbei faehrt, dann vibriert der mit (ich uebertreibe gern ein wenig). Das sollte man beim spaeteren mechan. Aufbau bedenken. Gruss hro
Mich würde viel mehr interessieren wie du diese Ausgangskurve 3 mal hintereinander fast deckungsgleich hinbekommen hast. Hast du den Sensor in Ruhelage ausgelesen? Knut
Hallo zusammen, erstmal danke für die Beiträge. @Wolfgang: Empfindlichkeit ist bei allen 3 Sensoren 1024LSB/g Bandbreiten: - LIS3LV02DL: 40Hz (=digital filter cut-off frequency) - LIS3DH: 50Hz (keine Angaben zur cut-off frequency) - LIS331DLH: 50Hz (low pass filter cut-off frequency 74Hz) @Bastler: Erdbeben kann ich glaub ich ausschließen. Ich habe diese Messungen mehrere Male wiederholt und immer wieder dasselbe Ergebnis bekommen. @hro: Der Schaltungsaufwand sollte so gering wie möglich sein. Außerdem werden die Beschleunigungsdaten an einen PC gesendet und mit LavVIEW aufbereitet. Dann würde ich den Tiefpass eher dort implementieren. Ich befürchte allerdings, dass ich mir damit für meine Anwendung wichtige "Nutzinformation" wegfiltere. Das werde ich aber noch ausprobieren. @Knut: Ich habe das "Messgerät" an die Rückseite einer Schublade befestigt und versucht, diese 3mal gleich zu öffnen und zu schliessen. Gruß Christian
Wenn ich das richtig überschlage ist die "Rausch"-Frequenz im Bereich der Eckfrequenz der angegebenen Tiefpasse (komisches Plural?). Der "unverschauschte" Sensor hat eine etwas niedrigere Eckfrequenz und vieleicht auch noch ein etwas steileres Filterverhalten. Das Rauschen könnte z.B. das Rucken der Gleitflächen bei einem Gleitlager oder auch Vibrationen bei dem Auszug der Schublade sein. Übrigens würde ich dir auf jeden Fall raten zusätzlich ordentlich analog zu filtern. Aliasingeffekte die du beim Wandeln reinbekommst kann auch das beste LabView Programm nicht mehr rausrechnen. Manchmal ist Analog einfach besser :-) p.s. Die Idee mit der Schublade ist prima.
Hallo Udo, ist dann nicht die Gefahr größer, dass ich mir auf dem "analogen" Weg vom Beschleunigungssensor über den Filter zum A/D-Wandler Störungen einfange? Was genau verstehst du unter "ordentlich" analog filtern? Ein Tiefpass mit steilem Filterverhalten (mit OPV aufgebaut)? Gruß Christian
Christian Swoboda schrieb: > ist dann nicht die Gefahr größer, dass ich mir auf dem "analogen" Weg > vom Beschleunigungssensor über den Filter zum A/D-Wandler Störungen > einfange? Nur wenn du dir absolut sicher bist, daß du keinerlei relevante Signalanteile mit Frequenzen >= Abtastrate/2 hast kannst du auf analoge Filterung verzichten. Christian Swoboda schrieb: > Was genau verstehst du unter "ordentlich" analog filtern? Ein Tiefpass > mit steilem Filterverhalten (mit OPV aufgebaut)? Jepp, bei den niedrigen Frequenzen einen aktiven Tiefpass z.B. 4. Ordnung mit Butterworth Charakteristik. Siehe z.B. die Bibel Tietze Schenk "Halbleiterschaltungstechnik".
Das sieht weniger nach Rauschen, als mehr nach Schwingen aus. Vielleicht solltest Du versuchen, die Schwingneigung zu reduzieren. Vielleicht enthalten die Datenblätter dazu einige nützliche Tipps.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.