Hallo zusammen! Zusammen mit meinem Bruder habe ich eine CNC Fräsmaschine gebaut - diese funktioniert bis jetzt 1A. Doch jetzt geht es darum auch die Frässpindel über den PC in der Geschwindigkeit zu steuern. Eine Hochfrequenz-Frässpindel aus Hong Kong wird mit einem vorgeschalteten Converter betrieben. Diesem kann man die Drehzahl via Spannungsteiler mitgeben - Bereich 0-10 Volt via Poti. Meine Steuersoftware (Mach3) kann für die Spindel ein PWM Signal über den Parallelport ausgeben. Nun möchte ich gerne dieses Signal über einen Art DAC zu einem geglätteten Signal als Spannungsteiler umwandeln. Hierzu habe ich bereits folgenden Eintrag im Wiki entdeckt: http://www.mikrocontroller.net/articles/Pulsweitenmodulation#DA-Wandlung_mit_PWM Leider hilft mir dies nicht besonders weiter - in Elektronik kenne ich mich nur mittelmäßig aus. Mir stellt sich die Frage wie ich ein solches geglättetes Signal auf die 10 Volt umwandle und trotzdem die Referenzspannungen des Converters nutzen kann (oder soll/muss?). Über jede Anregung und Tipps wäre ich echt dankbar wie dies zu realisieren wäre! Gruß Sven
SvenPWM schrieb: > Diesem kann man die Drehzahl via > Spannungsteiler mitgeben - Bereich 0-10 Volt Du mußt also aus deinem PWM Signal eine Spannung zwischen 0 und 10V erzeugen. ZB. 0%PWM = 0V bis 100%PWM = 10V Ergo mußt du nur hinter den PWM-Ausgang ein RC-Glied schalten, und dann den Spannungswert passend verstärken. > Mir stellt sich die Frage wie ich ein solches > geglättetes Signal auf die 10 Volt umwandle Mit einem passenden OP-Amp ist das keine Hexerei... > und trotzdem die > Referenzspannungen des Converters nutzen kann (oder soll/muss?). Du meinst die 10V, die der Converter ausgibt, und an die das Poti angeschlossen ist? Falls ja: die brauchst du nicht. Du könntest sie aber zum Betrieb eines Rail-to-Rail OP verwenden...
Lothar, vielen Dank für deine Antwort. Du hast mein Problem richtig erfasst. Besteht denn die Möglichkeit, dass du mir evtl. ein Beispiel-Schaltplan für dieses Problem suchst? Die Verstärkung mittels OP-Amp würde ich sicher noch irgendwie hin bekommen, aber Rail-to-Rail OP sagt mir absolut nichts. Ich muss doch sicherlich die Masse des Converters sowie die meiner OP verbinden, damit hier der Potentialunterschied von der Steuerung erkannt werden kann - ist meine Annahme soweit korrekt? Wenn du weder Zeit noch Lust hast - auch in Ordnung ;-) Ich würde nicht danach fragen, wenn ich es nicht wirklich selbst lösen könnte... Gruß Sven
Die MACH3 liefert das Signal aus dem Parallelport,
und bei dem ist nicht bekannt, ob es 3.3V oder 5V liefert.
Auch wissen wir nicht, welche Betriebsspannung für
die Schaltung zur Verfügung steht, die das 0-10V Signal
erzeugen soll.
Zumindest 10V wäre schon gut.
+12V
|
10k
|
+---10k--+----+-- 0-10V
| | |
Parallelport --1k--|< BC547 1uF 100k
|E | |
Masse -------+--------+----+-- Masse
Eventuell den 1uF an die maximale Geschwindigkeitsänderung
des Motors anpassen.
MaWin schrieb: > +12V > | > 10k > | > +---10k--+----+-- 0-10V > | | | > Parallelport --1k--|< BC547 1uF 100k > |E | | > Masse -------+--------+----+-- Masse Aber aufpassen: hier hat der High- und Low-Pegel jeweils eine andere Impedanz. Deshalb sind die steigenden und die fallenden Flanken jeweils unterschiedlich steil und damit die Übertragung Tastverhältnis->Spannung nicht linear. Ich würde den Pullup nach 12V etwas niederohmiger machen...
Hm, und daß der Transistor die PWM invertiert, macht nix ? Nimm einen UDN 2981, dann bleibt das Signal phasenrichtig, am Ausgang einen R und C. Wie schnell soll sich die Spindelgeschwindigkeit ändern können ?
oder noch einfacher: Optokoppler Primärseitig den Port der Mach3 an die LED, sekundärseitig mit dem Ausgangstranistor eine Kollektorschaltung bauen, d.h Kollektor an +10V, Vorteil: Das Ganze ist galvanisch getrennt.
>ein PWM Signal über den Parallelport ausgeben. Das funtkioniert durch die (WIndows)Treiber durch? >hinter den PWM-Ausgang ein RC-Glied schalten Welche Frequenz und Auflösung hat denn das PWM Signal?
> Das funtkioniert durch die (WIndows)Treiber durch?
Wer Mach3 hat, hat seinen Rechner entsprechend verbogen,
z.B. ACPI abgeschaltet.
Mittlerweile habe ich etwas recherchiert. Mach3 verwendet seine eigenen Treiber - die Software selbst läuft unter XP was dies etwas einfacher macht. ACPI wurde von mir manuell nicht abgestellt, könnte ich mir aber mal überlegen. Vom Timing her kommt man natürlich nie an eine hohe PWM Frequenz heran (20kHz). Was allerings durch gewisse Einstellungen möglich ist sind etwa 250Hz. Dazu gibt es bereits einen tollen Beitrag im Netz: http://www.buildlog.net/cnc_laser/mach_laser_power.html Mir würden 250Hz mit einem RC Low-Pass Filter schon ausreichen - eine galvanische Trennung via Optokoppler werde ich vermutlich mit integrieren, denn die Steuerung selbst ist auch schon so realisiert. Trotz geschirmter Kabel surren die Motoren noch deutlich hörbar... Die Auflösung auf 100 Schritte halte ich ebenfalls für ausreichend - lässt sich ja aber via Software anpassen. Die Steuerung kann auch gerne eine halbe Sekunde brauchen ihre Geschwindigkeit anzupassen - die ist ohnehin gerade auf etwa 2 Sekunden zum Hochdrehen eingestellt (via Konverter).
Angehängte Dateien:
-

schaltung.png
4,2 KB
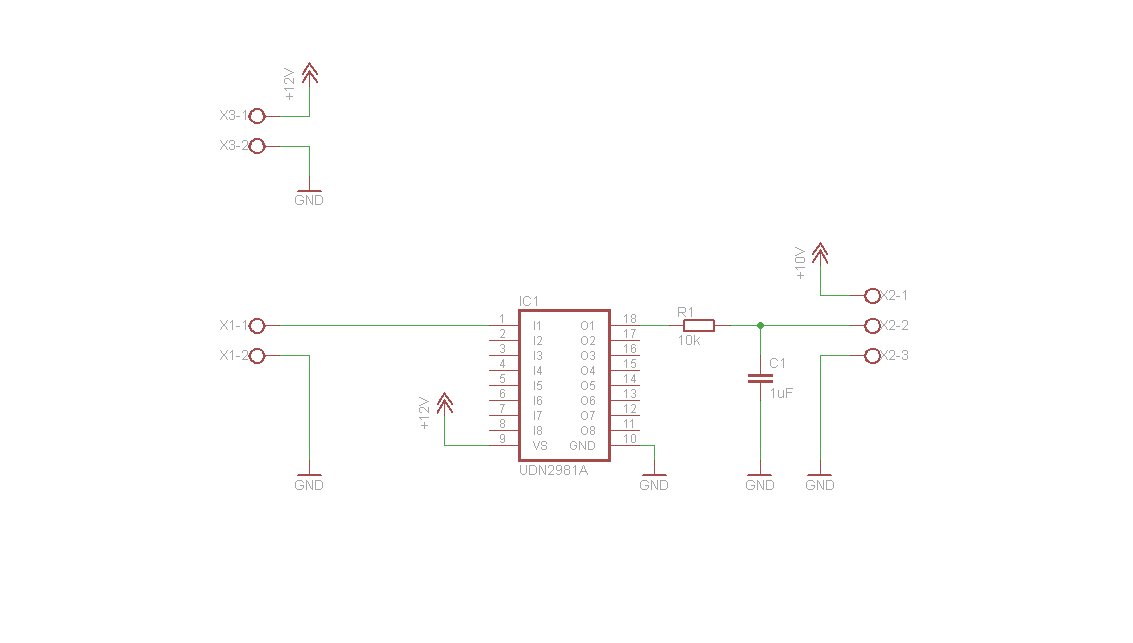
Hallo nochmals. Für das oben beschriebene Problem wurde nun folgender Schaltplan erstellt. Ist dieser so in Ordnung oder benötige ich noch ein paar andere externe Komponenten für den UDN? Da ich mit 12V die Platine betreibe und im UDN intern etwa 1,8V abfallen, sollte das mit den 10V für den Konverter hin hauen. Bitte um Kommentare und Verbesserungsvorschläge :) Gruß Sven
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.