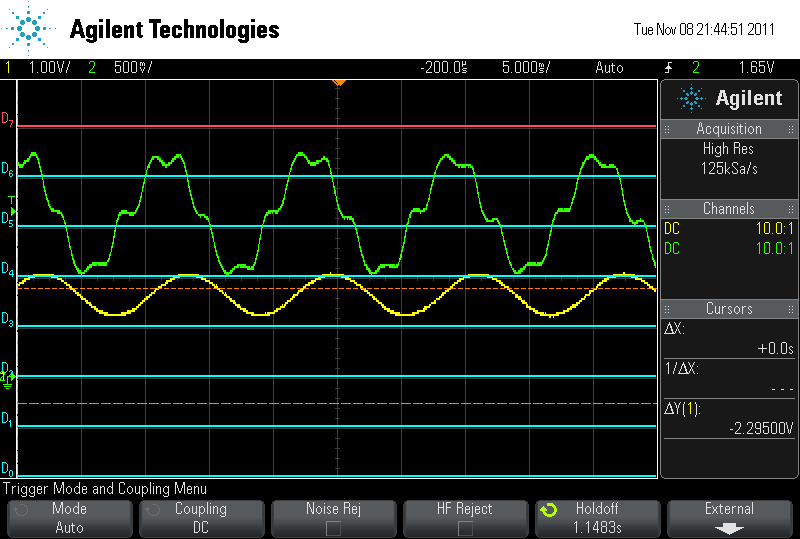
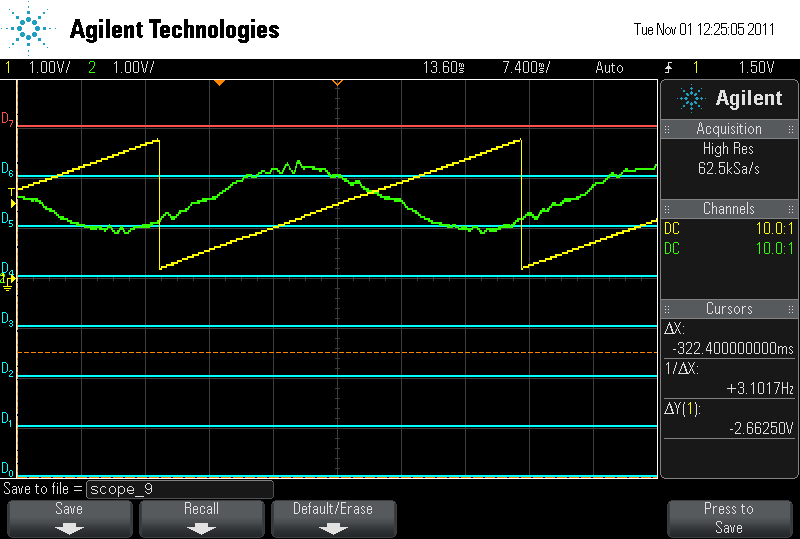
Guten Abend zusammen, mit meinem Eigenbauwechselrichter stoße ich gerade auf ein "komisches" Verhalten meines Gesamtsystems, dass ich auch nach längere Fehlersuche nicht erklären kann. Die in Software aufgebaute Regelung ist feldorientiert, sensorbasiert. Bild 1 zeigt den Phasenstrom bei hohen Drehzahlen. Als Motor dient ein günstiger Pedelec-Motor aus China. Bild 2 zeigt den Phasenstrom bei niedrigen Drehzahlen (noch etwas hoher P-Anteil bei diesem Bild). Frage: ist es normal, dass die Phasenströme bei hohen Drehzahlen zunehmend hässlicher werden? Gruß und schönen Abend! Jedi
Angehängte Dateien:
-

scope_21.png
9,2 KB -

scope_9.png
7,9 KB
:
Verschoben durch Admin
Hey, ich weiß nicht ob das weiterhilft aber heute habe ich in einen anderen Zusammenhang mir mehere Appilkationen zu BLDCs durchgelesen. Bei einigen waren Bilder von den einzelnen Phasenströmen zu sehen welche eher Pulsförmig/Rechteckförmig aussahen. - Es kommt darauf an was du "regelst". Diese eher merkwürdigen Signalverläufe wurden damit begründet das man somit den Drehmoment oder einen anderen Parameter stabil hält und es somit erforderlich ist die Amplitude, Freqeunz... zu verändern. Warum die Phasenströme mit desen Betrag "hässlicher" werden kann ich nicht sagen, vielleicht gibt es Probleme mit der Bandbreite deines Regelsystemes. Mehr Input könnte Hilfreich sein!
Okay, vielen Dank. Das macht mir etwas Mut. Also ich möchte das Drehmoment des Motors regeln, indem ich den Iq regle. Ich kenne mich leider zu wenig mit Motoren aus um da eine gute Aussage treffen zu können inwiefern der Phasenstrom so moduliert werden muss um konstantes Moment zu erzeugen. Was man auf den beiden Bilder auf dem gelben Kanal sehen kann ist der Rotorwinkel, einmal als Sinus/Cosius, einmal als Sägezahn. Beide Verläufe sind total harmonisch. Der Motor läuft auch absolut Geräusch- & Vibrationsfrei. Mich macht lediglich die hässliche Form der Phasenströme stutzig. beste Grüße! Jedi
jedi82 schrieb: > Frage: ist es normal, dass die Phasenströme bei hohen Drehzahlen > zunehmend hässlicher werden? Dass bei höherer Drehzahl die Kurvenform schlechter wird, ist normal; die Frage ist eben, um wie viel schlechter. War der Motor im Leerlauf oder ist das beim Nenn-Moment? Im Leerlauf ist es ganz normal, dass der Strom nicht schön aussieht. Solange der Motor ruhig läuft und nicht zu warm wird, ist es auch kein Problem, wenn der Strom nicht so schön aussieht.
Hallo, so hässlich sind die doch garnicht. Es ist blos mit der 3. harmonischen moduliert. Mach mal ne fft, dann siehst du es.
Wie hoch ist denn die Pulsfrequenz und wie ist die Ausgangsfrequenz? Axel
> Hallo, so hässlich sind die doch garnicht. Es ist blos mit der 3. > harmonischen moduliert. Es sieht eher so aus, als haettest Du einen 5-phasigen BLDC und dann wirken die anderen Phasen magnetisch zurueck. Gruss Michael
Angehängte Dateien:
-

4301634201400008im.jpg
57 KB
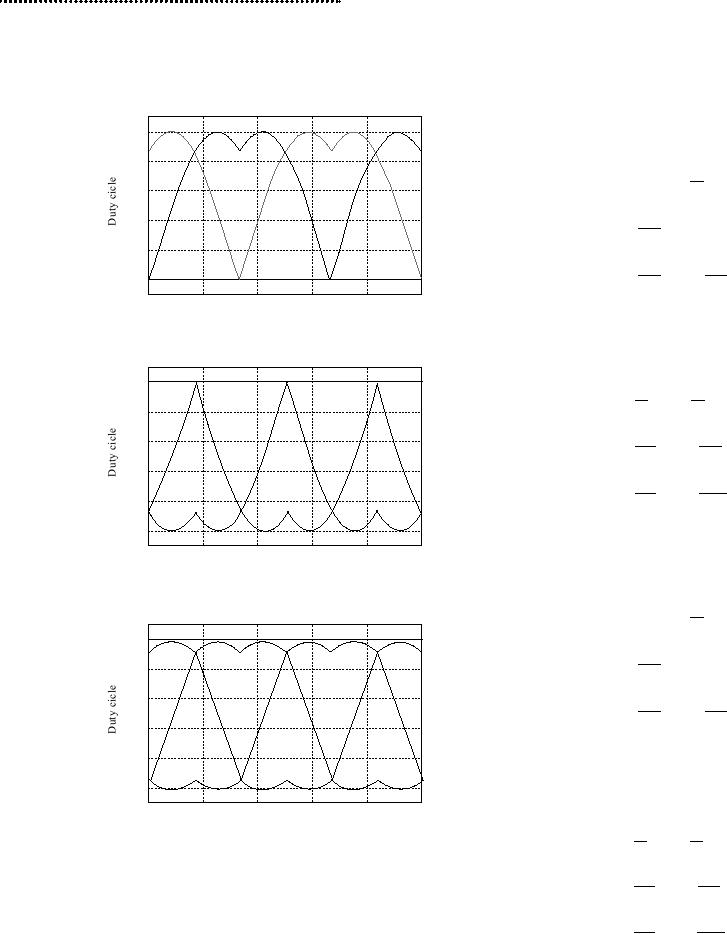
Also das PWM läuft mit 18kHz. Ich glaube ich habe noch einen Denkfehler in der Umrechnung von Usd, Usq in die Ansteuerzeiten. Vielleicht erkennt jemand meinen Denkfehler? Im Moment erzeuge ich aus den Ansteuerwerten Usd und Usq (Ergebnisse der beiden PI Stromregler) zuerst per Pytagoras den Betrag des resultierenden Raumzeigers, und die Winkelvorgabe für den Vektor über einen arc-sin. Damit gehe ich dann in meine SVPWM-Funktion die in abhängigkeit von diesen beiden Werten die DutyCycles für die 3 Phasen ausrechnet... Meine SVPWM-Funktion ist simuliert, getestet, und bringt Ergebnisse für die DutyCycles wie in dem angehangenen Bild. Ich vermute aktuell einen Fehler bei der Konstruktion des Winkels des rotierenden Raumzeigers. Anbei für Interessierte mein Simulinkmodell zum Umrechnung von Usd,Usq zu U_Ref (Betrag des RZ) und TR (Winkel des RZ). Gruß, Jedi
Hi Jedi! Was nutzt du für einen Kontroller? Der muss ganz schön fix sein... Symmetrisches/Asymmetrisches Sampling? Bei deiner Erklärung und dem Blick auf die Plots würde ich vermuten, die Modulation hat einen Fehler- bei geringen Frequenzen ist die Bandbreite deines Reglers noch hoch genug um bei der eingestellten Vergrößerung die Fehler in der Modulation zu verschleiern und auszuregeln. Du siehst z.B. in dem Plot mit geringer Drehzahl, dass der Strom im Maximum seiner Amplitude eine Schwingung hat, die auf Grund der Phasenlage nicht von Totzeit verursacht sein sollte. Auch der in dem einem Bild erhöhte P-Anteil spricht dafür, dass der Regler den Fehler (welchen auch immer) schneller ausregelt. Warum muss es denn SV-PWM sein? Mit Sinus-Dreieck-Vergleich und dem entsprechenden Korrektursignal kommen exakt die gleichen Pulsmuster raus und die Berechnung geht wesentlich schneller. Da es recht einfach zu implementieren ist, würde ich zunächst versuchen die SV-PWM durch Sinus-Dreieck zu ersetzen. Gruß Martin
Angehängte Dateien:
-

scope_24.png
8,5 KB
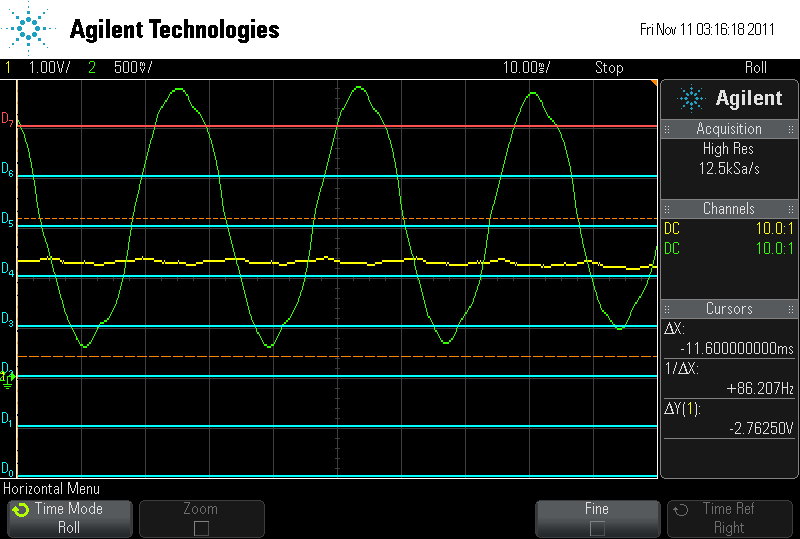
Hallo zusammen, danke für die Unterstützung. Ich möchte des Rätsels Lösung nicht verheimlichen. Modulation ist das Stichwort. Und zwar habe ich die beiden Ansteuerwerte Ud / Uq nicht im gleichen Verhältnis begrenzt, im Falle das Ud^2 + Uq^2 > 0,866^2. Dadurch ist der der resultierende RZ immer ein wenig um die Solllage gependelt... Das erklärt auch warum bei kleinen Aussteuerungen ein schöner Sinus raus kam. Jetzt kommt auch bei vollem Speed ein halbwegs schöner Sinus raus (siehe Bild). Guts Nächtle und Danke! Jedi
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.