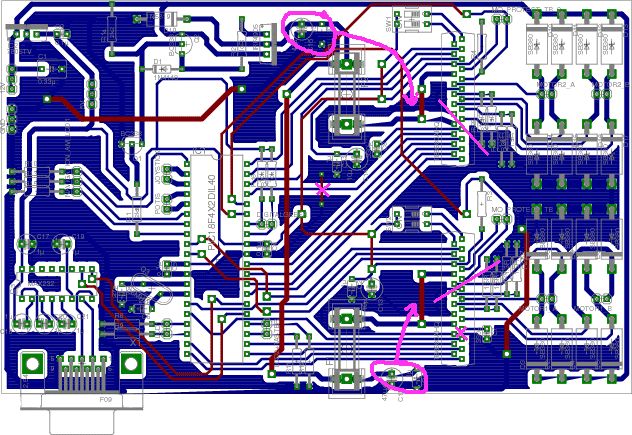
Hallo Ich habe ein kleines Problem mit meiner Schrittmotorsteuerung via Toshibas TB6560 und weiß leider nicht mehr weiter. Eins vorweg, dass das Layout alles andere als ideal ausfällt ist mir mittlerweile bewusst. Als Bastler (Pfuscher) hab ich dummerweise zuerst auf leichte Löt- und Ätzbarkeit geachtet, was sich nun scheinbar rächt. Nun gut. Folgendes. Von dieser 2-Achsen Steuerung funktioniert nur die Hälfte und zwar der, betrachtet man das Layout in der Draufsicht, untere Motortreiber. Hier reagiert der Motor einwandfrei auf sämtliche Eingänge, alle Funktionen haben sofort mitgespielt und auch die Signale sehen am Oszilloskop brauchbar aus. Sobald ich jedoch an der oberen Stufe einen Motor anschließe beginnen die Probleme. Das Offensichtlichste ist, dass der Motor bereits ohne Taktgebung seitens des Controllers Schritte ausführt. Wenn ich ihm einen Takt vorgebe, dann folgt er diesem zwar, jedoch merklich unrund. Es scheint in beide Richtungen Schrittverluste zu geben. Auch die Ausgangssignale sehen (sofern ich das als Amateur Punkto Schrittmotoren beurteilen kann) nicht sehr gut aus. Das fängt beim Oszillator des Treibers an, der kein glattes Dreieck mehr ist, sondern wandert, und auch die Ausgänge zum Motor hin sehen bei weitem nicht so gut aus, wie die des funktionierenden Treibers. Leider besitzt mein Oszilloskop nur 2 Eingänge, weshalb ich mir nicht alle Ausgänge zeitgleich ansehen kann. Ich habe bereits versucht, den Treiber IC durch weitere 100n direkt an den Pins zu stützen, leider vergeblich. Bin somit für alle Vorschläge offen. Sofern mein Layout wirklich komplett unbrauchbar ist und unverzeihliche Fehler enthält, steht auch einer erneuten Anfertigung nichts im Wege. Mit freundlichen Grüßen Vincent
Entweder offene Leitung, Layoutfehler oder Soft. Verstehst du was die Schaltung machen muss oder hast du einfach etwas abgekupfert ?
Angehängte Dateien:
-

001.gif
82 KB
{kind=link}
> Layout alles andere als ideal ausfällt ist mir mittlerweile bewusst
Achso, Text fehlt: Löte mal 2 Drähte als Masseverbindung unten auf, und trenne die alte Masseverbindung beim Kreuz auf. Versetze die 10uF/100nF Kondensatoren von vor der Sicherung auf nach der Sicherung. Die 47uF pro TB6560 sind übrigens zu wenig um die Gegen-EMK der Motoren aufzunehmen, Ich hoffe, du hast vor dem MOSFET Schaltransistor (der ja durch die Body-Diode in Gegenrichtung leitet auch wenn er ausgeschaltet sit) noch mindestens 4700uF als Siebelko halbwegs in der Nähe (also nicht nach 1m Kabel) zur Platine.
Die Schaltung entstammt meiner Feder (bzw. ein Teil dem TB6560 Datenblatt) und mir ist auch die Funktionsweise klar. Leitung dürft keine offen sein, sonst würde ja der Motor gar nicht(?) laufen. Softwarefehler schließe ich aktuell aus, da mein "Testprogramm" eine simple Schleife mit Delay ist, die alle 100 Millisekunde einen Schritt produziert (~4 Zeilen Code). Es besteht höchstens die Möglichkeit, dass ich irgendeine Funktion des PIC18F4520 übersehen habe, die an einem Pin unvorhergesehene Sachen ausgibt. Werde das gleich nochmals prüfen. Sonst würd ich sagen, dass es in irgendeinerweise an der Hardware liegt. Ich seh ja auch, dass am OSC Pin des Treibers irgendein Blödsinn passiert. (angesprochenes Dreieck) /edit ok danke, werde das gleich mal angehen!
Na bitte! Das war ja eine Lösung in Akkordzeit! Danke vielmals.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.