Guten Abend Freunde der Nacht! Ich wollte mir mal ein paar Ratschläge von euch holen. Ich mache gerade meine ersten Versuche mit BLDC-Motoren (ohne Hall-Sensoren). Ich habe mir eine dreifach H-Brücke aufgebaut, erstmal noch mit p- und n-Kanälern - angesteuert wird das ganze vorerst durch das LaunchPad, daher sind meine Möglichkeiten auch erstmal begrenzt. Die ganzen AppNotes von Microchip etc. habe ich bereits durchgelesen Momentan möchte ich den Motor auch erstmal nur gescheit zum Laufen bringen, daher erstmal ein paar Fragen. Kann ich den Motor überhaupt ohne Rotor-Positions-Erkennung halbwegs gescheit laufen lassen, indem ich das Drehfeld vorgebe? Ich mache das momentan so und er dreht sich auch, jedoch würde ich das ganze nicht als gut bezeichnen, denn - die Geschwindigkeit lässt sich durch das Timing in Software (momentan einfach noch delay-Zyklen zwischen den Phasenwechseln) nicht wirklich regulieren...entweder geht es, oder nicht - die Umdrehungen sind noch leicht mit dem Auge zu verfolgen, also nicht wirklich schnell... - die Halbbrücken werden extrem heiß, sobald ich den Strom weiter als 500mA aufdrehe...kann dies evtl. auch daran liegen, dass mit die Spannung soweit einbricht, dass die FETs nicht mehr gescheit schalten? - der Motor ist ein Wald und Wiesen-Motor, den ich mir in der Bucht geschossen habe, Nominalstrom ist 15A, das kann mein Netzteil eh nicht, da müssten dann Akkus her, aber da habe ich bedenken, dass die Brücken direkt abrauchen Mir ist klar, dass die ganze Geschichte sinnvoll kommutiert werden muss, aber es geht mir grad erstmal um das Grundverständnis und vor allem ein paar Oszi-Bilder zwecks BEMF usw. Soweit ich da mittlerweile druchblicke, regel ich mit der PWM ja die Drehzahl und die Kommutierung muss dann gemäß der Rotorposition erfolgen. Anhand der Phasenwechsel kann ich auf die Drehzahl schließen, sofern der Motor synchron läuft. Mein Ziel ist im Endeffekt, die PWM von einem Controller-Pin auf AND-Gates zu führen und mit dem zweiten Eingang dann das Gate und damit den FET zu schalten - schlechte Idee (also ist ja nicht meine Idee...sagen wir "schlechte Variante")? So, das erstmal - ich würde mich freuen, wenn ihr mir ein paar Zeilen zurückschreiben könntet. Vielen Dank
Eberhard schrieb: > dreifach H-Brücke Ich meine natürlich 3x eine Halbbrücke, aber ich denke, das ist klar.
Hallo. Ich habe auch mal eine Feldorientierte Regelung implementiert .. hatte auch deine Erfahrungen gemacht. Ohne Lageerkennung, ob Hallsensoren oder BEMF, bekommt man kein stabiles Verhalten hin. Der Motor kommt außer Tritt, wenn er etwas schneller läuft, und die Transistoren werden heiß. Texas Isntruments veröffentlich auch einiges brauchbares material auf seienr Homepage, kannst ja mal nach "Motor Control Primer" suchen). Das mit dem AND-Gatter hab ich nicht verstanden.
Also wenn dein Netzteil den Strom nicht bringt, kannst du den Test vergessen. Im Prinzip gilt: Ohne Hallsensoren kannst du den Motor nur langsam anfahren und abbremsen und er muß gegen eine steigende Kraft arbeiten - Propeller, Gebläse, Pumpen, Festplatten. Denn im Prinzip ist der Strom ja die Kraft also das Drehmoment und wenn nichts da ist, wogegen die arbeiten kann, dann dreht der Motor nicht in einer sinnvollen Art, spätestens wenn der Strom so weit steigt wie es der ohm'sche Drahtwickelwiderstand bei der Spannung vorgibt, dann hast du ein Problem, weil der Motor seine überschüssige Kraft irgendwohin loswerden muß, auch in sinnloses rumzappeln. Hast du anfahren unter Last, oder soll die Drehzahl bei unterschiedlichem Drehmoment geregelt werden, dann brauchst du Sensoren (auch BackEMF wäre ein Sensor).
Angehängte Dateien:
-

prinzip.png
5,1 KB
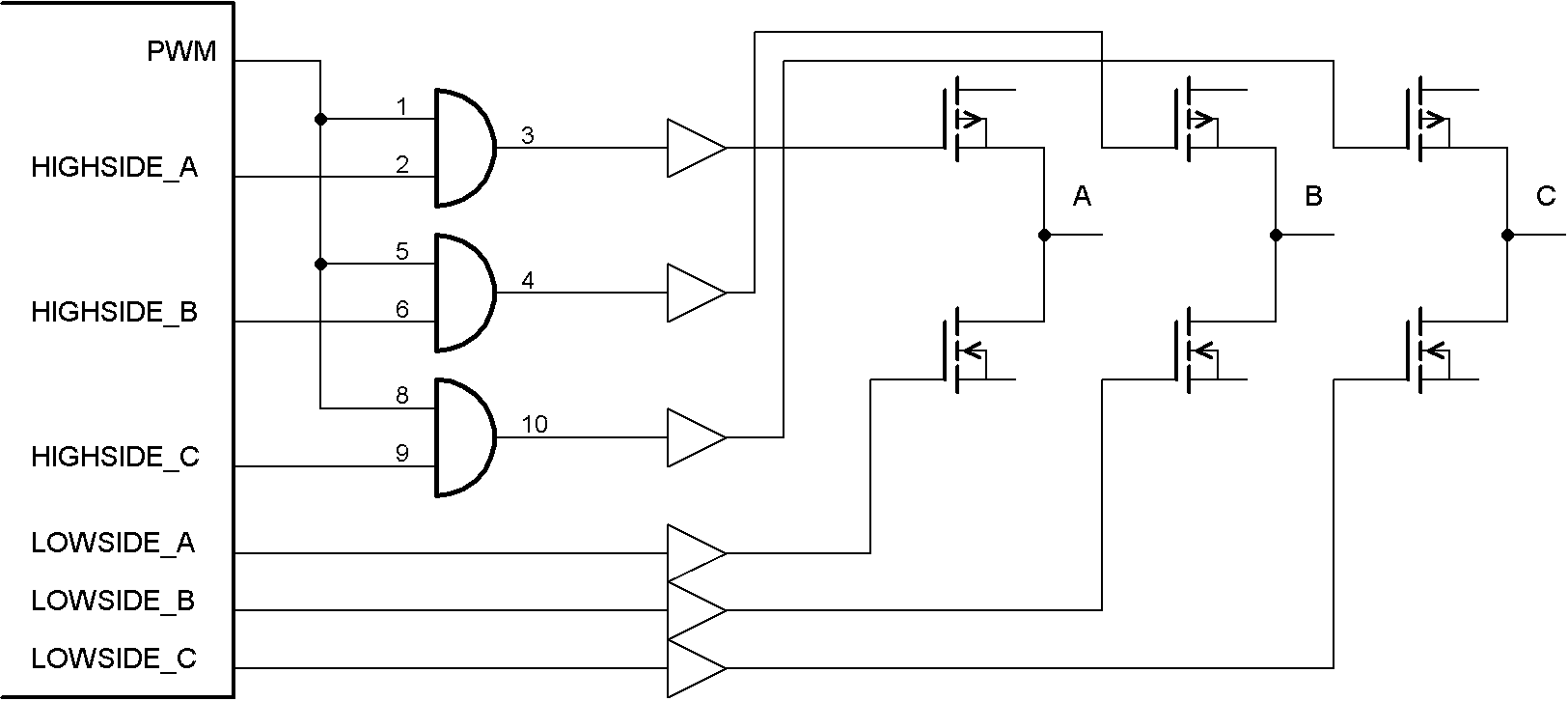
Dr.Schmock schrieb: > Das mit dem AND-Gatter hab ich nicht verstanden. Siehe Anhang MaWin schrieb: > Also wenn dein Netzteil den Strom nicht bringt, > kannst du den Test vergessen. Das denke ich auch, da die Gates garnicht die benötigte Spannung am Gate bekommen. Ich werde mir nachher mal einen schwächeren Motor besorgen...ne alte Festplatte oder so. MaWin schrieb: > er muß gegen > eine steigende Kraft arbeiten - Propeller, Gebläse, > Pumpen, Festplatten. Also ohne Last läuft das Ding nicht rund? MaWin schrieb: > dann brauchst du Sensoren OK, dachte vielleicht, ich kann den erstmal irgendwie ohne Sensoren durch ein Drehfeld rotieren lassen, aber naja.
Ich habe zwar keine Ahnung, aber mein Modellbaumotor dreht auch ohne Last prima hoch. Und auch wieder runter. Der hat auch keine Sensoren. Also scheint das in gewissen Bereichen auch ohne zu klappen oder ? Ich habe schon Schaltungen im Netz gesehen wo die Strommessung der drei Wicklungen erfasst wurde. Eventuell wird darüber etwas geregelt ? Und wenn dein Netzteil den Strom nicht schafft macht deine Schaltung irgendwas aber bestimmt kein vernünftiges Regeln mehr ;) Gruss, Jörg
Hallo, schau doch mal bei microkontroller.net unter quadrokopter nach. Da ist alles beschrieben mit Bauanleitungen. Gruß
Düsendieb schrieb: > Dass die Dreiecke Gatetreiber sein sollen, hast Du aber beachtet? ?? Verstehe nicht ganz, was du meinst. Ich habe die Dinger jetzt nur mal ersatzweise darein gezeichnet. Das sollen Treiber sein, ja (symbolisch).
Mal ne andere Frage: Die Verlustleistung am FET...was geht noch ohne Kühlkörper? Ich habe ja vorerst vor, als High-Side p-Kanäler zu nehmen. Die haben einen rdson von 20mOhm - wenn der Motor jetzt 15A zieht, dann habe ich über dem FET ja immerhin schon eine Verlustleistung von
Ist ja schon nicht ganz ohne... Selbst beim n-Kanäler mit 8mOhm ist die Verlustleistung 1,8W. Wie sind denn dann die 100A-Regler aufgebaut? Groß sind die ja auch nicht.
mehrere N MOSFETs parallel und natürlich gescheite Gatetreiber...
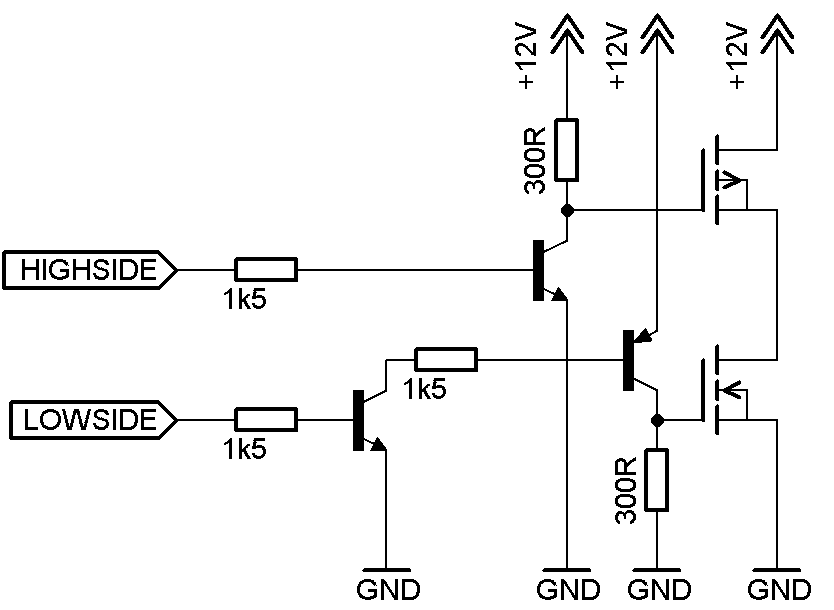
Hi, schau dir deine 2 ansteuerungssignale an! Es kann sein das deine Low und Highfets zeitweise offen bzw geschlossen sind und so ein Kurzschluss verursacht wird! (ich geh davon aus das du jetzt keinen Treiber benutzt) Es kann auch sein (falls du keine Treiner benutzt) das deine Flanken an den Mosfets nur langsam steigen -> verlustleistung im Fet steigt (je nach frequenz des gatesignals) Es wäre hilfreich zu wissen wie die gesamtschaltung nun aussieht.
Eberhard schrieb: > Also ohne Last läuft das Ding nicht rund? Nicht, wenn du einfach blind ein Drehfeld mit voller Betriebsspannung anlegst. Eberhard schrieb: > OK, dachte vielleicht, ich kann den erstmal irgendwie ohne Sensoren > durch ein Drehfeld rotieren lassen, aber naja. Kannst du auch zu einem gewissen Grad. Allerdings muss die per PWM vorgegebene Spannung zumindest zur Drehzahl passen. Zorg schrieb: > mehrere N MOSFETs parallel 15A kann nun wirklich jeder dementsprechende einzel-FET schalten. Eberhard schrieb: > Ist ja schon nicht ganz ohne... Entsprechende Kühlung vorausgesetzt kein Problem.
Überschneiden tuen sich die Ansteuersignale nicht, das habe ich schon geguckt. Woher weiß ich denn eine "richtige PWM Spannung"? Generell kann ich aber doch einen BLDC in 100% Duty-Cycle fahren, oder?
Eberhard schrieb: > Überschneiden tuen sich die Ansteuersignale nicht, das habe ich schon > geguckt. Bedenke, dass das Gate als Kondensator wirkt. Eberhard schrieb: > Woher weiß ich denn eine "richtige PWM Spannung"? Artikelbeschreibung, die RPM im Leerlauf pro Volt werden idR als kV angegeben. Für das unbelastete Hochfahren im Blindflug ein guter Anhaltspunkt. Eberhard schrieb: > Generell kann ich aber > doch einen BLDC in 100% Duty-Cycle fahren, oder? Die Spannung hängt von der gewünschten Drehzahl ab.
Also es handelt sich um folgenden Motor: http://www.ebay.de/itm/EMAX-CF2822-BRUSHLESS-MOTOR-1200KV-28-22-Quadrocopter-/310333272090?pt=RC_Modellbau&hash=item48414df01a Jetzt wollte ich gerade mal einen Motor aus einer Festplatte ausbauen, aber die haben alle 4 Anschlüsse - die kann ich ja garnicht anstelle des jetzigen Motors benutzen. gaast schrieb: > Bedenke, dass das Gate als Kondensator wirkt. Also die Signale sind alle in Ordnung. Habe ich nochmal nachgeguckt. gaast schrieb: > 15A kann nun wirklich jeder dementsprechende einzel-FET schalten. Das können die schon, aber es fallen halt 4,5W Verlustleistung an, zumindest beim p-Kanäler - das ist ja nicht wenig. hubert schrieb: > Es kann auch sein (falls du keine Treiner benutzt) das deine Flanken an > den Mosfets nur langsam steigen -> verlustleistung im Fet steigt (je > nach frequenz des gatesignals) Die Ansteuerung der Gates wird durch Transistoren realisiert. Klar, nicht die schnellste Variante, da sollen noch Treiber hin. Ich bin mir nur noch nicht so schlüssig, was ich nehmen soll. Besser wären natürlich nur n-Kanäler und dann mit Ladungspumpe - da sind hier in der Übersicht ja einige Typen. Aber dann geht nicht 100% Duty-Cycle, oder? Wie oft/lange muss denn der High-Side dann mindestens immer mal auf 'low'?
Eberhard schrieb: > Jetzt wollte ich gerade mal einen Motor aus einer Festplatte ausbauen, > aber die haben alle 4 Anschlüsse - die kann ich ja garnicht anstelle des > jetzigen Motors benutzen. Doch, du musst nur die 'Mitte' der Sternschaltung freilassen, dann sind die Anschlüsse kompatibel.( U,V,W) Eberhard schrieb: > Das können die schon, aber es fallen halt 4,5W Verlustleistung an, > zumindest beim p-Kanäler - das ist ja nicht wenig. Ich glaube , dein Problem ist eher die (nicht vorhandene) Totzeit. Die Highside muss abschalten, dann kommt die Totzeit, und dann schaltet die Lowside. Niemals dürfen High- und Lowside gleichzeitig an sein, und grade beim Abschalten sind die MOSFets immer ein bisschen träge. Leg mal einen Shunt in die Betriebsspannung und ein Oszi um die Spannung zu messen. Siehst du da Spitzen, ist deine Totzeit zu klein. 'Sensorless' BLDC Motoren werden in einer AVR Appnote beschrieben, und ausserdem behauptet Freescale gerade, das sie jeden Motor mit ihrer neuen Software anlaufen lassen können , ohne Ruckeln und so. Finde die Email leider grade nicht, bräuchtest aber wahrscheinlich einen Freescale MCU dafür. Die meisten Sensorless BLDC werden per ADC an den UVW Anschlüssen rückgekoppelt , ist aber beim Anlaufen trotzdem ein Ratespiel. Schau mal unter 'Variable Frequency Drive' im Netz.
gaast schrieb: > Zorg schrieb: >> mehrere N MOSFETs parallel > > 15A kann nun wirklich jeder dementsprechende einzel-FET schalten. das war aber die Antwort auf die Frage im Post vorher: Eberhard schrieb: > Wie sind denn dann die 100A-Regler aufgebaut? Groß sind die ja auch > nicht.
Mit Bootstrap-schaltungen hab ich eher schlechte Erfahrungen gemacht, da ich bei mir probleme mit dem schaltverhalten(delay im lowfetzweig) der Mosfets hatte ! Ansonsten hat die anstiegszeit deiner schaltflanken weniger mit dem transistor, als mit der Größe des Kollektorwiderstands zutun. Über diesen wird dein gate dementsprechend schnell aufgeladen und der Mosfet durchgeschaltet. Was steht denn im Datenblatt bezüglich des Max.-Stroms / bzw. P_max?
Angehängte Dateien:
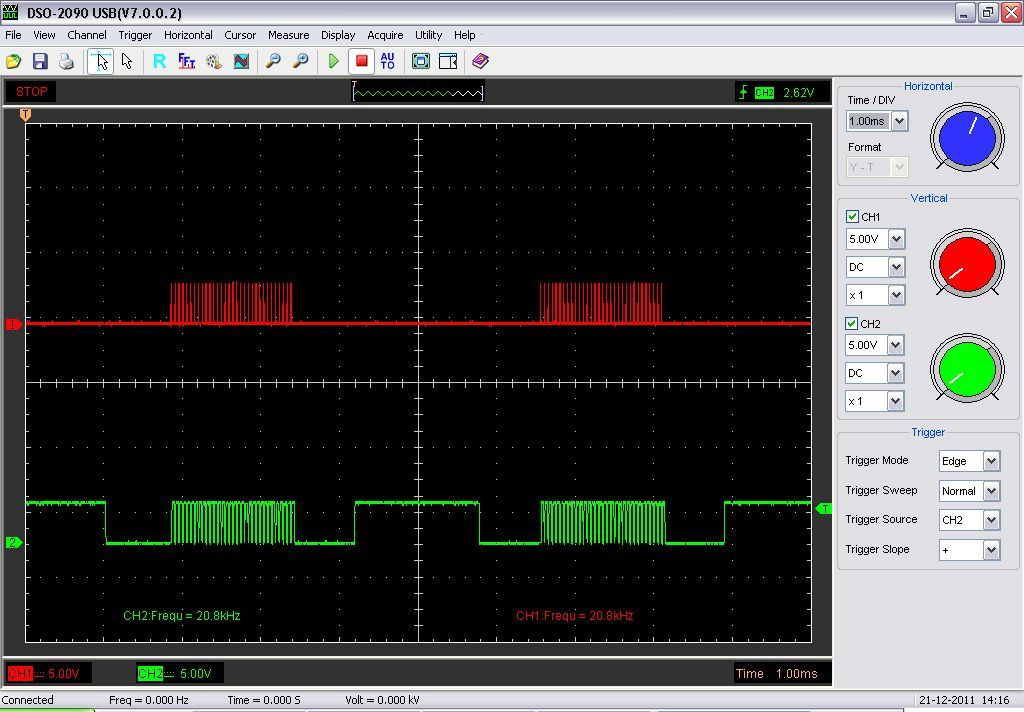
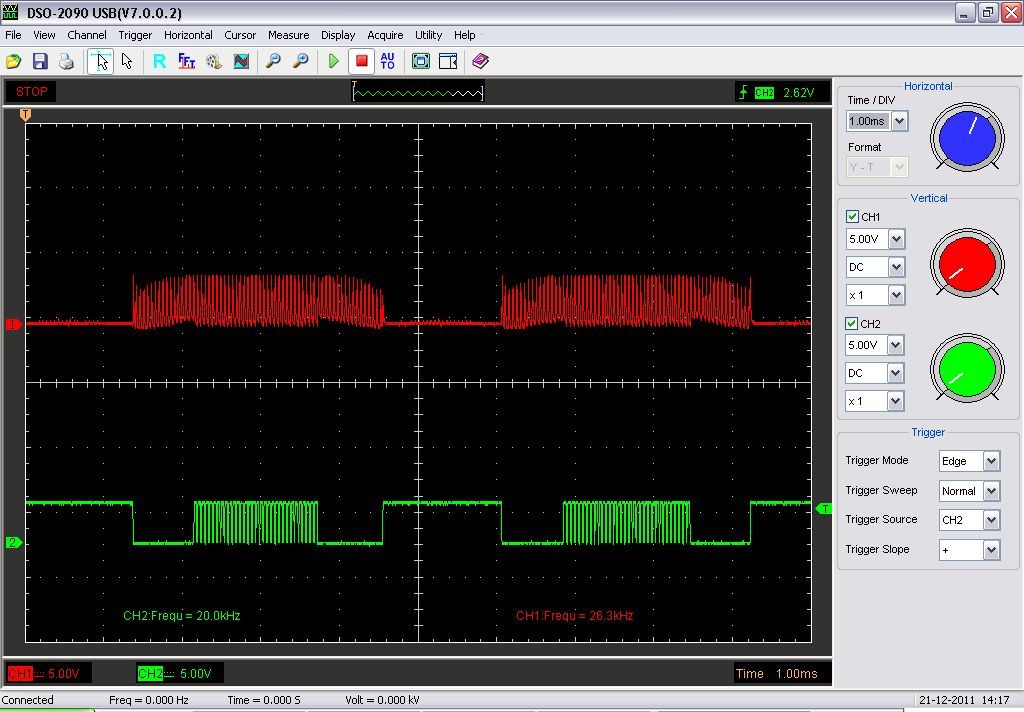
Hallo Eberhard, Ich mache auch gerade meine ersten Gehversuche mit sensorless BLDC motor driver. Ich habe soweit alles im Griff (glaube ich), bis auf hohe Drehzahlen unter Last (Motor mit Propeller so über 4000 U/min). Meine Erfahrungen: Wenn die FETs heiß werden kann es an der Überschneidung (wenn auch nur kurzzeitig) zwischen high und low liegen. Dead times lautet dafür das Zauberwort. Oder es kann sein, für den Fall, dass du kein komplementäres PWM (aktiver Freilauf) benutzt, die Freilaufdioden in den FETs heiß werden. Welche Firmware benutz du denn? Selbstgestrickt? Welchen Chip? Anbei ein paar Oszi Bilder von meinem Motortreiber bei 12V ca 1400 U/min mit Prop. Gruß Carsten
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.