Servus, ich beschäftige mich zur Zeit mit der indirekten Feldorientierten Regelung und werde dazu bald ein Simulationsmodell erstellen. In der verwendeten Software ist die PWM schon hinterlegt. Dq0-transformations-"Blöcke" sind auch schon vorhanden. Für mich gilt es jetzt "nur" noch, das inverse Maschinenmodell zu bekommen. Dazu mehrere Fragen: 1.)Um ein Wunschmoment vorzugeben, brauch ich ja eigentlich keine Regelschleife. --> Das Maschinenmodell berechnet ja aus den Strömen, WInkeln, Flüssen die notwendige Spannung--> D.h. ich geb ein Moment ins Maschinenmodell, und bekomme idealerweise eine Spannung heraus. ??? 2.) Es müsste daher ja ein Drehzahlregelkreis langen, der nach dem PI-Regler ein Moment vorgibt, dass im Maschinenmodell in die passende Spannung umgewandelt??? 3.) Annahme: Der Softwarehersteller verwendet das Maschinenmodell X, kommt man dann mit dem inversen Maschinenmodell Y auch auf die richtigen Spannungen?? GRuß
Wenn das sowas ist, was die Angelsachsen 'Space Vector Modulation' nennen ? 2. Ja, der PI Regler wird ja als Sollwert die Drehzahl bekommen, und dann versuchen die Motorspannung solange zu erhöhen , bis Ist = Soll erreicht ist. 3. Gute Frage. Du wirst vermutlich mit P und I Faktoren experimentieren müssen, denn jede Maschine hat andere V/RPM Kennlinien und träge Massen. Oder hab ich was völlig mistverstanden ?
Salut Hermann, > 1.)Um ein Wunschmoment vorzugeben, brauch ich ja eigentlich keine > Regelschleife. > --> Das Maschinenmodell berechnet ja aus den Strömen, WInkeln, Flüssen > die notwendige Spannung--> D.h. ich geb ein Moment ins Maschinenmodell, > und bekomme idealerweise eine Spannung heraus. > ??? Prinzipiell ja, wenn das Maschinenmodell etwas taugt ;-) > 2.) Es müsste daher ja ein Drehzahlregelkreis langen, der nach dem > PI-Regler ein Moment vorgibt, dass im Maschinenmodell in die passende > Spannung umgewandelt??? Mittels der feldorientierten Regelung kannst Du Deine Asynchron- oder Synchronmaschine so regeln, wie eine Gleichstromnebenschlußmaschine. Guck' Dir doch einfach mal die Regelstruktur einer solchen Gleichstrommaschine an. > 3.) Annahme: Der Softwarehersteller verwendet das Maschinenmodell X, > kommt man dann mit dem inversen Maschinenmodell Y auch auf die richtigen > Spannungen?? Eine pauschale Antwort auf eine pauschale Frage: Wenn das Maschinenmodell zu Deiner Maschine passt, also z.B. eine permanentmagnetisch erregte Drehstrom-Synchronmaschine mit Oberflächenmagneten, dann sollte dieses Modell, nach entsprechender Parametrierung, auch mit Deiner Maschine arbeiten. Aber parametrieren musst Du es, also Induktivitäten, Widerstände, Leerlauf-Spannung über Drehzahl usw. Deines Motors eingeben. Evtl. errechnet sich das Modell diese Parameter aus anderen Angaben, wie Nenndrehzahl, Nenndrehmoment, Nennspannung usw. Dann besteht aber die Gefahr, dass die Werte nur für die Maschinen der Hestellers wirklich gut passen. Grüßle aus Stuttgart, Volker.
Angehängte Dateien:
-

flussmodell.png
5,5 KB
Hi, also etwas konkreter: 1.) Das Flussmodell besteht aus Gleichung im Anhang. 2.) Die ASM ist vom Hersteller modelliert und muss noch parametriert werden. 3.) Die Stromregelung id iq parametrier ich nach Betragsoptimum. 4.) Die Raumzeigermodulation ist schon modelliert und muss nur noch über die dq0-trafo mit den entsprechenden Spannungsraumzeigern versorgt werden. Meine Probleme: Wie bekomm ich einen Startwert für id (Fluss), iq (Drehmoment)? Gibt es dazu einen Leitfaden, bzw. kann man sich am Trafor-ESB der ASM orientieren? Wenn ich auf id und iq Stromsprünge draufgebe, müsste sich ja ein gewisses Verhalten einstellen? Feldschwächebereich soll vorerst nicht angefahren werden. Wär super, wenn ihr mir da ein paar tips geben könnt. gruß herminator
Hermann schrieb: > Wie bekomm ich einen Startwert für id (Fluss), iq (Drehmoment)? Möchtest du das etwa ohne Strom-Messung machen? Also nur über eine Modellrechnung eine Spannugn ausgeben? Du könntest einfach mit 0 als Startwert anfangen. Das ist dann zwar falsch, falls schon ein Strom fließt, aber auch jeder andere Startwert kann falsch sein, wenn man keine Strommessung hat. In der Praxis macht man das so, dass die Ströme gemesen und auf einen vorgegebenen Strom-Sollwert geregelt werden. Darüber sitzt dann das Modell, das aus dem Momentensollwert die Soll-Stöme vorgibt. Mit einem zusätzlichen Modell wird der Rotor-Fluss modelliert. Hier hat man auch das Problem, dass man mit irgend einem Startwert beginnen muss, den man evtl. nicht kennt. Allerdings schwingt sich das relativ schnell ein, die Rotor-Zeitkonstante ist recht kurz.
Hallo, Hermann schrieb: > 2.) Die ASM (...) Äh, ich komme von der PM-Synchronmaschine und kann Dir somit leider zu Deinem konkreten Problem nichts aus der Praxis sagen... > Wie bekomm ich einen Startwert für id (Fluss), iq (Drehmoment)? Ich würde mich meinem Vorredner anschließen und von Null ausgehen. Für mein physikalisches Verständnis musst Du, bevor die ASM anlaufen kann, erst den Rotorfluss aufbauen. Also würde ich zuerst id ansteigen lassen und dann iq gemäß des gewüschten Drehmoments vorgeben.
Hi, tausend dank für die Antworten. Hmm, natürlich ist eine Strommessung dabei. Indirekte Feldorientierung ist ja, wenn man Strom und mechanische Drehzahl misst. Direkte Feldorientierung wär alles über einen Beobachter, oder ein Motormodell zu machen. Ich werde morgen mal noch ein Bild liefern. Welche Daten brauch ich, um einen Stromsollwert berechnen zu können? Welche Formel kann man dazu verwenden??
Hallo Hermann, Hermann schrieb: > Welche Daten brauch ich, um einen Stromsollwert berechnen zu können? > Welche Formel kann man dazu verwenden?? Rotorfluss und iq bilden Dir Dein Drehmoment. Frag' mich aber nicht, wie Du es aus Deinen Modellparametern berechnen kannst. Wenn keine Feldschwächung gewünscht ist (also die Nenndrehzahl der Maschine nicht überschritten werden soll), dann würde ich pragmatisch vorgehen und id auf das 1/Wurzel(2)-fache des Nennstromes der Maschine einstellen und iq entsprechend des gewünschten Drehmoments wählen. Damit sollte stets genug Rotorfluss vorhanden sein, um eine hohe Dynamik der Maschine zu ermöglichen. Wenn Dein Ziel ein hoher Wirkungsgrad ist, dann würde ich iq und id gleich groß wählen, also, wenn weniger als das Nennmoment gefordert wird, auch id reduzieren. Aber, wie gesagt, alle Aussagen ohne praktische Erfahrung, nur als Diskussionsgrundlage ;-) Gruß, Volker.
Hermann schrieb: > Welche Daten brauch ich, um einen Stromsollwert berechnen zu können? > Welche Formel kann man dazu verwenden?? Theoretisch gibt es dafür Formeln, in der Praxis geht es em einfachsten mit einer Kennlinie bzw. einem Kennfeld, das abhängig von Drehzahl und Drehmoment den benötigten D- und Q-Strom und Frequenz ausgibt. Dieses Kennfeld kann man z.B. durch Messungen ermitteln wenn man einen geeigneten Prüfstand hat. Oder alternativ durch eine Simulation. Üblicherweise bekommt man dieses Kennfeld vom Motorhersteller bzw. vom Konstrukteur des Motors. Vor allem bei Motoren, die auf eine hohe Leistungsdichte optimiert sind, sind diese Kennlinien sehr nichtlinear, so dass man das mit Formeln nicht mehr sinnvoll handhaben kann. Bei einfachen Standard-Motoren geht es auch über eine Formel.
Hier ist eine recht ausfühliche Application Note, in der wird beschrieben, wie man eine feldorientierte Regelung mit relativ einfachen Formeln machen kann: www.ti.com/lit/an/bpra076/bpra076.pdf Schau dir das mal an, damit sollten die meisten deiner Fragen geklört sein.
Hi, also heut hab ich wieder den ganzen Tag rumgetan. Dieses doofe Strommodell. Ich möchte eigentlich nur ein Momentensprung auf die Strecke geben. Das Moment kann man ja mit der Drehmomentformel dann in einen Stromsollwert umwandeln. Hab ich gemacht. Was aber fürs Strommodell für mich irgendwie nicht klar ist. Nimmt man die Istwerte des gemessenen DQ-Stromes oder die Sollwerte des vorgegebenen DQ-Stromes? Bei meiner Simulation dreht sich die Maschine nur, wenn ich die Sollwerte id,iq ins Strommodell gebe. SObald ich die Istwerte eingebe, dreht sich die Maschine nicht mehr, da id und iq total klein sind. Oder hab ich da nen Umwandlungsfehler? oder hinsichtlich dq0-trafo und sollwerte, istwerte nen Denkfehler? Danke, ich hoffe und bin mr sicher, dass ihr klüger seid.
Hallo Hermann, Nur nochmal zu meinem Verständnis: Du hast ein Maschinenmodell, das Dir den an die Maschine anzulegenden Spannungsvektor berechnen soll -- richtig? Und dieses Modell kennt den augenblicklichen Fluss in der Maschine und das augenblickliche Drehmoment -- richtig? Dann würde ich jetzt vermuten, dass Du dieses Modell mit den Soll-Werten der Ströme füttern musst, da der Ist-Wert von Id ja bereits im Fluss der Maschine steckt und der von Iq im Drehmoment.
Hi Volker, Die Formel von oben ist praktisch ja das Maschinenmodell. Das Modell berechnet aus den Strömen id und iq den Fluss sowie den fortlaufenden Winkel, der ja an der dq0-trafo gebraucht wird. Jetzt ist eben die Frage, ob id und iq Sollwerte oder istwerte sein müssen. Mir ist auch vorher aufgefallen, dass leider bei der Rücktransformation keine Gleichgrößen rauskommen, sondern auch ne wechselgröße anderer Frequenz. Im Moment gebe ich in das Maschinenmodell id und iq als Sollwerte. Bei der Rücktransformation kommen aber leider Wechselgrößen raus. Dieses Strommodell ist aber definitv richtig, da ich s schon an mehreren Stellen gesehen habe. Die Spannung gibt ja dann der PI-Stromregler aus. Aber diese Spannung ist ja die Streckenverstärkung von Spannung PI-regler zu Strom nach der Raumzeigermodulation (glaub ich). Gruß
Hallo Hermann, > Die Formel von oben ist praktisch ja das Maschinenmodell. Das Modell > berechnet aus den Strömen id und iq den Fluss sowie den fortlaufenden > Winkel, der ja an der dq0-trafo gebraucht wird. OK, soweit einverstanden. Das ist das Modell für den Rotorfluss. Aber damit natürlich noch kein vollständiges Maschinenmodell, denn Dich interessiert ja eigentlich nicht der Fluss in der Maschine sondern deren Drehmoment. > Jetzt ist eben die Frage, ob id und iq Sollwerte oder istwerte sein > müssen. Für die Berechnung des Rotorflusses musst Du definitiv die Ist-Werte eingeben. Die Soll-Werte existieren ja noch garnicht. Was ich jetzt absolut nicht verstehe, ist, was Du dann mit dem Rotorfluss anstellst. Gut, dessen Lage wird für die Achsentransformation benötigt. Aber was machst Du mit dem Betrag des Flusses? Ich würde jetzt erwarten, dass Du über das Soll-Moment die Soll-Werte von Id und Iq ermittelst. Jetzt würde ich ein weiteres Modell erwarten, welches aus dem Rotorfluss (== induziertes Drehspannungssystem) und den Ist- und Sollwerten der Ströme den neuen Spannungsvektor errechnet. Ich verstehe nicht wirklich, wie das ein Regler lösen soll? Aber, wie gesagt, ich kenne das Problem nicht aus eigener Erfahrung bzw. aus der Praxis. > Mir ist auch vorher aufgefallen, dass leider bei der Rücktransformation > keine Gleichgrößen rauskommen, sondern auch ne wechselgröße anderer > Frequenz. Von welcher Größe redest Du jetzt? > Im Moment gebe ich in das Maschinenmodell id und iq als Sollwerte. Bei > der Rücktransformation kommen aber leider Wechselgrößen raus. Dieses > Strommodell ist aber definitv richtig, da ich s schon an mehreren > Stellen gesehen habe. Das kann ich mir physikalisch nicht vorstellen. Das Prinzip der ASM ist m.E. wie folgt: Id baut den Rotorfluss auf oder ab und Iq bildet mit diesem das Drehmoment. Der Rotor bewegt sich, aber der Fluss läuft nicht mit der mechanischen Rotor-Frequenz um, sondern asynchron. Dann ist die Regelungsstrategie nach meinem Verständnis die folgende: 1. Ist-Vektor des Rotorflusses bestimmen 2. Ständerströme auf d/q-System (Rotor) transformieren 3. Aus Soll-Moment neuen Sollwert von Iq berechnen (Drehmoment-Regler) 4. Entsprechend der Führungsstrategie der Maschine Id korrigieren (langsam) 5. Aus Flussvektor, Ist- und Soll-Strömen den Spannungsvektor berechen 6. Spannungsvektor in den Stator transformieren 7. Neues Schaltmuster der Umrichterbrück errechnen. Der Drehmoment-Regler greift m.E. nur in Schritt 3 ein und hat nichts mit irgendwelchen Maschinenmodellen oder Achsentransformationen zu tun. Wichtig ist vielleicht noch folgendes zum Verständnis der ASM: Die Zeitkonstante des Rotorflusses ist sehr groß. Also kann dieser zwischen zwei Reglertakten als konstant angesehen werden. M.E. brauchst Du zwei Regler, einen sehr schnellen für Id, mit dem Du das Drehmoment führst (Dynamik!) und einen langsamen für Id, der den Rotorfluss führt, genau so, wie bei der Gleichstrom-Nebenschlussmaschine Ankerstromregler und Feldstromregler. Grüßle, Volker.
Volker Bosch schrieb: > M.E. brauchst Du zwei > Regler, einen sehr schnellen für Id, mit dem Du das Drehmoment führst > (Dynamik!) und einen langsamen für Id, der den Rotorfluss führt, genau > so, wie bei der Gleichstrom-Nebenschlussmaschine Ankerstromregler und > Feldstromregler. Ich würde das etwas anders formulieren: Der schnellste Regelkreis wird für die Stromregelung (Id, Iq) gebraucht. Dieser Regler hat die Aufgabe, den Ist-Strom gleich dem Soll-Strom zu machen. Überlagert gibt es eine Modell für den Rotorfluss, das wesentlich langsamer arbeitet. Zum besseren Verständnis kann man hier annehmen, dass in der Stator-Wicklung Soll- und Ist-Wert für Id nd Iq gleich sind, der Stromregler also ideal arbeitet. Und dann gibt es noch ein Modell bzw. eine Formel, die aus dem Soll-Moment die Strom-Sollwerte für Id und Iq berechnet. Dabei ist der Iq-Sollwert direkt proportional vom Soll-Moment abhängig, muss also schnell berechnet werden. Der Id-Sollwert hängt eher von der Drehzahl ab, aber je nach Motorauslegung auch vom Drehmoment. Der Sollwert für Id sollte dabei eher langsam geändert werden (Tiefpass-Filter); der Stromregler muss aber auch den Id schnell nachregeln.
Angehängte Dateien:

Hallo, Für das Strommodell hier folgender Link, in dem auch die Erklärung für die Sollwerte drin is. http://www.srt.tu-darmstadt.de/fileadmin/edu/S3-de.pdf Seite 12 Danke für folgende Sequenz: Volker Bosch schrieb: > 1. Ist-Vektor des Rotorflusses bestimmen --> Dazu nehme ich das Strommodell her ( Soll oder Istwerte immer noch nicht klar, da im obigen File ja die Sollwerte genommen werden. Das Strommodell gibt den fortlaufenden Winkel des Rotorflusses auf der d-achse an. > 2. Ständerströme auf d/q-System (Rotor) transformieren --> Du meinst wohl die Istwerte... Das ist von meinem verständnis aber auch viel klarer. Aber wieder verweis ich auf obiges File. > 3. Aus Soll-Moment neuen Sollwert von Iq berechnen (Drehmoment-Regler) Die Formel für das Moment im Rotorflussorientierten Koordinatensystem ist: Formel (29) im obigen PDF. Dabei ist Psi 2A der Rotorfluss und i1B=iq, damit hab ich die Beziehung zwischen Drehmoment vorgabe und Strom auf der q-achse. 4.) id und iq werden nun zurücktransformiert ins ständerfeste Koordinatensystem. Da die PWM ja Spannungen benötigt muss ich irgendwie ( Keine Ahnung) die Ströme id und iq in Spannungen umrechnen. ???? Hier noch zum Verständis. Ich möchte noch KEINE Stromregelung haben. Ich möchte einfach einen Sollwert fürs Moment vorgeben ( der in einem Sollwert iq resultiert). Die Sollwerte für id und iq muss ich jetzt eben in einen Spannungsvektor verwandeln ( wie??), um damit die PWM zu füttern. --> Leider funktioniert die Rücktransformation nicht in meinem Modell, d.h. im bekomme keine Gleichgrößen nach Transformation des Ist-Ströme. Laut TU Darmstadt hab ich dann die Sollwerte fürs Strommodell genommen und einen "Sollwinkel" berechnet, mit dem ich die dq0 trafo füttere. Danke schon mal für eure Hilfe, is echt super! greez
Hallo Herrmann, Herrmann schrieb: > Für das Strommodell hier folgender Link, in dem auch die Erklärung für > die Sollwerte drin is. > http://www.srt.tu-darmstadt.de/fileadmin/edu/S3-de.pdf Seite 12 Interessant. Von der Theorie her macht das in meinen Augen keinen Sinn, bzw. erinnert mich an die Geschichten von Münchhausen (der sich an den Haaren selbst aus dem Sumpf zog): Wie soll ich den den Strom regeln, wenn ich annehme, dass dieser bereits fließt? Nach längerem Nachdenken könnte es aber doch sinnvoll sein, wenn die AD-Umsetzung des Strom-Ist-Werts bezogen auf den Reglertakt vergleichsweise lang dauert, evtl. in Folge eines Tiefpass- bzw. Glättungsfilters. > Da die PWM ja Spannungen benötigt muss ich irgendwie ( Keine Ahnung) die > Ströme id und iq in Spannungen umrechnen. ???? Nein, ich würde mir ausrechnen, welchen Spannungsvektor ich anlegen muss, um den gewüschten Strom innerhalb eines Reglertakts zu erzwingen und dazu benötigst Du m.E. ein paasendes Maschinenmodell. Unter der Annahme, dass der berechnete Fluss gleich der Flussverkettung Psi in der Statorwicklung ist, kannst Du ganz einfach die in der Wicklung induzierte Spannung berechnen: u = w * d Psi / dt Da Dein System keine höhere Zeitauflösung als den Reglertakt delta t kennt, ist Dein d Psi ganz einfach die Änderung des Flusses ziwschen zwei Reglertakten, also d Psi ~ delta Psi = Psi(n) - Psi(n-1) und dt ist gleich delta t. Wenn Du den Antrieb als einfaches Modell, bestehend aus externer Spannungsquelle (Umrichter), interner Spannungsquelle (induzierte Spannung), ohmschen Wicklungswiderstand und Induktivität betrachtst, dann kannst Du Dir berechnen, welche Spannung UL für einen Reglertakt an der Indukiviät anliegen muss, um in Ihr eine Stromänderung delta I zu erzeugen. Ansatz: UL = L dI/dt -> UL = L delta I/delta t Also mein Ansatz wäre folgender: 1. Transformiere die Strom-Sollwerte in das Ständersystem 2. Berechne aus dem Fluss den Spannungsvektor und transformiere ihn ebenfalls in das Statorsystem. Berechne Dir in jedem Strang die erforderliche Stromänderung delta I, die benötigt wird, um den gewüschten Sollwert zu erreichen, indem Du vom Sollwert den gemessenen Ist-Wert subtrahierts. Mit dem delta I berechnest Du die Spannung UL, die an der Induktivität des jeweiligen Strangs anliegen muss. Zu UL addierst Du den ohmschen Spannungsabfall, also das Produkt aus ohmschen Widerstand und Ist-Strom, sowie die induzierte Spannung. Und diese Summen-Spannung muss nun der Umrichter an genau diesen Strang anlegen. Evtl. wäre es noch sinnvoll die Knotenregel einzuhalten, d.h. die Summe aller Ströme muss 0 sein (damit muss auch die Summe aller dI/dt == 0 sein und damit hier auch die Summe aller delta I == 0. > Hier noch zum Verständis. Ich möchte noch KEINE Stromregelung haben. Eine echte Stromregleung erachte ich auch nicht für sinnvoll. Damit die eine ausreichende Dynamik bekommt, benötigt sie eine hohe Stellreserve in der Spannung, was m.E. gegen einen guten Wirkungsgrad des Antriebs spricht. > Danke schon mal für eure Hilfe, is echt super! Gerne, ich lerne hier auch noch einiges, zumal ich mir das noch nie im Detail überlegt habe. Grüßle, Volker.
Hi Volker, deine Antwort hat mich auch zum Grübeln gebracht. Ich hab daraufhin in dem Simulator folgende Geschichte aufgebaut. 1.) Ich habe schon einen fertigen Block zur SVPWM 2.) Ich habe schon nen fertigen Block für die Asynchronmaschine 3.) Und einen für die dq0-trafo hin und zurück Damit hab ich jetzt folgendes angestellt: 1.) Ich habe zwei beliebige Stromgrößen id und iq als konstante quelle angegeben. Diesen id und iq hab ich dann jeweils mit meiner RL-Last sqrt(2)\45° multipliziert. So erhalte ich ja die Spannung. Diese Spannung hab ich mithilfe der dq0-trafo in abc Koordinaten verwandelt. --> Den Winkel hab ich über einen Rampe mit der Steigung 50 Hz angegeben ( 18000 Grad pro Sekunde). Diese Wechselgrößen schicke in die PWM und bekomme sie dann an meiner RL-Last zu sehen. Da ich ja in meinen Konstant blöcken einen Strom vorgegeben habe, messe ich dann in jeder Phase den Strom und transformiere diesen wieder ins dq0-System mit dem Winkel 18000Grad/sek. Wenn ich jetzt den Betrag der d und q KOmponente bilde, komm ich genau wieder auf den Betrag, den ich in den Konstant Blöcken vorgegeben habe. Das passt also und ist auch verständlich. Was allerdings komisch ist ( oder ich verstehs nicht ) ist der Phasenwinkel. Daher die Fragen: Stellt sich bei der Berechnung des Spannungsvektors für die SVPWM der Strom der Last automatisch ein oder kann man den noch irgendwie beeinflussen? Wenn ich die Stromkomponenten d und q definier erhalte ich einen Betrag und eine Phase. Die gemessenen Stromkomponenten haben zwar den gleichen Betrag wie definiert, aber die Phase stimmt hinten und vorn nicht. Wie addiert man bei einer Phasenverschiebung des Stroms ggüber der Spannung von -45Grad (ohmsch induktiv) die Winkel im dq0-System, um dort auf den resultierenden winkel zu kommen. d.h.z.B. 45 Grad Phasenverschiebung I,U + 10 Grad (winkel im dq0-System). Wie fließt die Phasenlage zwischen Strom und Spannung IM dq0-system in die Berechnung der Winkel ein? Gruß ps.: ich hoff, des is nicht zu kompliziert erklärt :-)
Hallo Herrmann, Herrmann schrieb: > 1.) Ich habe zwei beliebige Stromgrößen id und iq als konstante quelle > angegeben. > Diesen id und iq hab ich dann jeweils mit meiner RL-Last sqrt(2)\45° > multipliziert. So erhalte ich ja die Spannung. Nein! Über R erhälst Du nur die Verluste in der Maschine (in der Induktivität wird keinerlei Leistung umgesetzt). Um mit der el. Maschine el. Leistung in mechanische umzusetzen, muss durch eine äußere Quelle ein Strom in die Maschine eingespeist werden, der gegen die in der Wicklung induzierte Spannung fließt und dabei Leistung umsetzt. Diese Leistung ist in guter Näherung die mech. abgegebene Leistung. Und genau diese Spannungsquelle beeinflusst die anzulegende Klemmenspannung. Sie muss also bekannt sein, um das einzustellende Tastverhältnis der Umrichterbrücke zu ermitteln. Ich habe den Eindruck, dass bei Deiner Betrachtung diese induzierte Spannung nicht auftaucht. Sie lässt sich, wie bereits gesagt, ganz einfach berechnen, wenn man den räumlichen (und zeitlichen) Verlauf des magn. Flusses kennt, der mit der Statorwicklung verkettet ist (Induktionsgesetz). In diesem Fluss steckt auch schon die Hauptinduktivität der Maschine. Es fehlt also nur noch die Streuinduktivität, die p.D. nicht mit dem Rotorfluss verkettet ist. Gruß, Volker.
HI Volker, ich hatte mich falsch ausgedrückt. Ich habe hinten keine Asynchronmaschine dran hängen sondern pro phase R+L--> also nen rein passiven ohmsch induktiven Widerstand. -->und bei dieser Rein passiven Geschichte kann ich dann einfach I*Z=U machen. Der Sollstrom im dq-System kommt nach der SVPWM an der Strommessung nach Betragsbildung auch wieder raus. Bei der Asynchronmaschine muss man dann wohl noch die Gegenspannung (die durch den Schlupf induziert wird) mit berücksichtigen. Gruß
Hallo Herrmann, Herrmann schrieb: > (...) Ich habe hinten keine > Asynchronmaschine dran hängen sondern pro phase R+L--> also nen rein > passiven ohmsch induktiven Widerstand. OK. Verstanden. > -->und bei dieser Rein passiven Geschichte kann ich dann einfach I*Z=U > machen. Einverstanden. > Der Sollstrom im dq-System kommt nach der SVPWM an der Strommessung nach > Betragsbildung auch wieder raus. Schön :-) > Bei der Asynchronmaschine muss man dann wohl noch die Gegenspannung (die > durch den Schlupf induziert wird) mit berücksichtigen. Nicht durch den Schlupf. Der Fluss in der Maschine induziert eine Spannung in der Wicklung. Das gilt für jede elektrische Maschine. Du Deinem Posting vom 10.12.2011 11:50 > 1.) Ich habe zwei beliebige Stromgrößen id und iq als konstante quelle > angegeben. > Diesen id und iq hab ich dann jeweils mit meiner RL-Last sqrt(2)\45° > multipliziert. So erhalte ich ja die Spannung. Einverstanden. > Diese Spannung hab ich mithilfe der dq0-trafo in abc Koordinaten > verwandelt. > --> Den Winkel hab ich über einen Rampe mit der Steigung 50 Hz angegeben > ( 18000 Grad pro Sekunde). OK. > Diese Wechselgrößen schicke in die PWM und bekomme sie dann an meiner > RL-Last zu sehen. Wie machst Du das genau? Ich hätte jetzt gesagt, dass ein Pulsweitenmodulator lediglich eine konstante Spannung ausgeben kann, also ibs. keine Wechselspannung. Ich hätte eher vermutet, dass es die Aufgabe des Stromreglers ist, eine Wechselgröße zu erzeugen, indem er mit jedem Reglertakt einen neuen Spannungswert ausgibt. Ich würde also zu jedem Reglertakt die Transformation in das Statorsystem durchführen, dort die drei Augenblickswerte der einzustellenden Umrichter-Ausgangsspannung berechen und diese genau für einen Reglertakt als drei (Gleich-)Spannungen an die Maschine anlegen -- oder anders formuliert: Für jeden Reglertakt wird ein Spannungsraumzeiger berechnet und konstant an die Maschine angelegt. > Stellt sich bei der Berechnung des Spannungsvektors für die SVPWM der > Strom der Last automatisch ein oder kann man den noch irgendwie > beeinflussen? Ich würde jetzt sagen, dass es die Aufgabe des Stromreglers ist, die Umrichter-Spannung, bzw. die drei Tastverhältnisse über die Zeit so einzustellen, dass sich statorseitig das gewünschte Drehstromsystem und damt rotorseitig das gewünschte Zweiphasensystem ergibt. > Wie fließt die Phasenlage zwischen Strom und Spannung IM dq0-system in > die Berechnung der Winkel ein? Ich würde lediglich die Augenblickswerte zu jedem Reglertakt betrachten und diese wie Gleichgrößen behandeln -- schließlich ist das Tastverhältnis ja auch bloß eine Gleichspannung, es hat keinerlei Phaseninformation. Erst der Regler macht daraus ein Drehspannungsystem. Aber vielleicht denke ich zu sehr in echter Hardware. Was bekommt denn Dein Space-Vektor-Pulsweitenmodulator-Kästchen an Eingangssignalen? Kann das "Kästchen" autonom ein echtes Drehspannungssystem erzeugen oder legt es, wie ich es jetzt von der Hardwareseite vermuten würde, genau einen Spannungsraumzeiger an die Maschine, also drei konstante (bzw. puslweitenmodulierte) Gleichspannungen? Grüßle, Volker.
Hi Volker, wäre natürlich schön, wenn ich auch praktisch denken könnte. Aber ich hab mit der Theorie noch so meine Bedenken :-). Zu deinen Antworten: 6 Volker Bosch schrieb: > Wie machst Du das genau? Ich hätte jetzt gesagt, dass ein > Pulsweitenmodulator lediglich eine konstante Spannung ausgeben kann, > also ibs. keine Wechselspannung. Dieser PWM Block ist ein Model zur Regelung der PWM. Der Block generiert am Ausgang die duty-cycle signale für die Leistungsschalter. Als Eingang hat der Block die Zwischenkreisspannung und die Sollspannungen der Phasen a,b,c. --> Im Endeffekt kann man das wohl mit dem in der Praxis eingesetzten Controller vergleichen, der die Leistungsschalter mittels SVPWM ansteuert. --> Weiteres Merkmal: Die Totzeit der Leistungselektronik wird nicht in Betracht gezogen. nochmals einfach (Zur Funktion des Blocks): Ich generier mir 3 120 Grad verschobene Sinusquellen mit Amplitude und Frequenz und schließ diese an den Eingang dieses Blocks an. Die Duty-Cycle Anschlüsse der Ausgänge schließ ich dann an die entsprechenden Leistungsschalter an ( Sind als Averaged Switches ausgeführt). Nach den Leistungsschaltern kann ich dann am von mir definierten RL-Verbraucher wieder die Spannung messen, die ich in den PWM Block als "Sollwert" gegeben hab. Volker Bosch schrieb: > Ich würde jetzt sagen, dass es die Aufgabe des Stromreglers ist, die > Umrichter-Spannung, bzw. die drei Tastverhältnisse über die Zeit so > einzustellen, dass sich statorseitig das gewünschte Drehstromsystem und > damt rotorseitig das gewünschte Zweiphasensystem ergibt. Die SOllspannungen am Eingang des Blocks generier ich mithilfe der dq0^-1-trafo. Der Pi-regler liefert jeweils auf d und q achse die Spannung die dann ins 3phasige System zurücktransformiert werden kann. Wenn dann noch der Winkel bekannt ist ( will ich mit dem Strommodell der ASM machen), kann ich wieder ins statorfeste System transformieren und hab somit den passenden Eingang für die PWM. Die Probleme sind ganz einfach, aber ich kriegs nicht hin: 1.) Bestimmung des Winkel aus Sollstrom id,iq und mechanischer Istdrehzahl geht nicht. Mittlerweile hab ich eh kei Ahnung mehr , ob Soll oder Istwerte bei id, iq und Drehzahl genommen werden. 2.) Eigentlich muss ich mir ja keine Gedanken darüber machen, wie die Spannungen in der ASM berechnet werden. Das macht ja der PI-Regler. 3.) Muss eigentlich bei einer Vorgabe, also Sollwert von id und iq der gemessene Strom am Verbraucher nach dq0-trafo wieder mit Betrag UND Phase stimmen oder nur mit Betrag? 4.) In meinem einfachen Modell mit dieser RL-Last geb ich ja einfach nur für den Winkel so eine Rampe vor und die Spannung ist auch klar. Was da schon komisch ist, das meine Stromvorgabe id,iq (Sollwert mit Betrag und Phase) dem gemessenen id,iq(Istwert mit BEtrag und Phase) NUR im Betrag übereinstimmt. Die Phase zwischen d und q bekommt dann noch den Einfluss der Phasenverschiebung zu spüren. Puuh....also schon interessant das ganze Zeug, aber auch nicht trivial. Gruaß und scho mal dankscheee fürs Antworten!
Angehängte Dateien:
-

SChematic.PNG
64 KB

Hier noch das schematic, der Block mit den Sektorpfeilen ist der benannte Block. Gruß
Hallo Herrmann, ich befürchte, ich kann Dir bei Deinen Fragen zu den Simulationsmodellen nicht weiterhelfen, da ich diese nicht kenne. Herrmann schrieb: > Die Probleme sind ganz einfach, aber ich kriegs nicht hin: > > 1.) Bestimmung des Winkel aus Sollstrom id,iq und mechanischer > Istdrehzahl geht nicht. Mittlerweile hab ich eh kei Ahnung mehr , ob > Soll oder Istwerte bei id, iq und Drehzahl genommen werden. Ich würde behaupten, dass Id und Iq Gleichströme sind. Erst wenn Du sie in den Stator zurücktransformierts werden Drehstromsysteme daraus. Und für die Transformation solltest Du nicht die Drehzahl sondern den aktuellen Winkel des Flussvektors, bezogen auf den Stator, verwenden. > 2.) Eigentlich muss ich mir ja keine Gedanken darüber machen, wie die > Spannungen in der ASM berechnet werden. Das macht ja der PI-Regler. Ich befürchte, dass genau da das Problem liegt. Niemand weiß was dieser Regler macht. Ich kann nur vage Vermutungen aufstellen, die uns hier aber offensichtlich nicht weiterbringen. Ich habe versucht, das physikalische Prinzip eine feldorientiert geregelten ASM zu erläutern. In die von Dir verwendeten Simulationsmodelle kann ich nicht hineingucken (ich habe Probleme damit, wenn mir ein Stückchen Software die reale Welt in ein paar nichtssagenen Kästchen versteckt ;-) > 3.) Muss eigentlich bei einer Vorgabe, also Sollwert von id und iq der > gemessene Strom am Verbraucher nach dq0-trafo wieder mit Betrag UND > Phase stimmen oder nur mit Betrag? Meiner Meinung nach sind Id und Iq Gleichströme, die aber nur für den Augenblick des betrachteten Reglertaktes gelten (Wenn Iq eine Phasenverschiebung aufweisen würde, dann wäre das kein Iq mehr. Das q steht dafür, dass diese Komponente senkrecht auf dem Flussvektor steht und damit genau diese Phasenlage aufweist). Im nächsten Takt können die Beträge von Id und Iq jedoch schon wieder ganz anders sein. Grüßle, Volker.
Herrmann schrieb: > Für das Strommodell hier folgender Link, in dem auch die Erklärung für > die Sollwerte drin is. > http://www.srt.tu-darmstadt.de/fileadmin/edu/S3-de.pdf Seite 12 Das ist nicht das Strom Modell der Maschine, dieses Modell zeigt dir nur wie du den Winkel aus den Istwerten bekommst. Den Winkel brauchst du dann für dei Transformation. Da du nur die Drehzahl von der Mschine bekommst, kanst du auch erst die Drehzahlen addieren und danach erst Integrieren um den Winkel zu bekommen. Der Ausgangswinkel ist dabei erst einmal egal da es ja eine ASM ist. Psi 2A ist in diesem Fall Proportional zu Id. Dann musst du nur noch dein Moment aus den Strömen berechnen und Machinen parameter in dq0 berechnen und vom Sollwert abziehen, die Differenz geht dann auf den Stromregler (Der Strom macht das Moment) der dann einen Stromsollwert für Iq rausgibt der zurück ins 3-phasige System transformiert wird. Das problem ist Id bzw der Rotorfluss da der Sollwert nicht ganz so einfach zu bestimmen ist. Vom Sollwert wird dann aber auch Id ist subtrahiert und der Regler liefert den neuen Id der zurück transformiert wird. Die Stromsollwerte im 3pahsigem gibst du dann auf die PWM, die die entsprechenden Spannungszeiger an die Maschine anlegt.
Angehängte Dateien:
-

Pic.png
41 KB

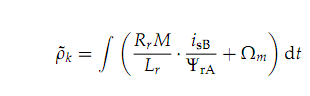
Hi Armin, Armin schrieb: > Das ist nicht das Strom Modell der Maschine, dieses Modell zeigt dir nur > wie du den Winkel aus den Istwerten bekommst. Den Winkel brauchst du > dann für dei Transformation. Das Modell heißt auch in der Literatur oft gesehen, strommodell, auch angehängt. Armin schrieb: > Das problem ist Id bzw der Rotorfluss da der Sollwert nicht ganz so > einfach zu bestimmen ist. Der Sollwert Id ist doch einfach zu bestimmen, dividier für diesen Sollwert einfach nur durch die Hauptinduktivität. Den Strom Iq bestimmt man aus der Drehmomentformel (Sollwertbestimmung.png). Aus Rotorfluss.png ( Formel aus Dierk Schröder / Elektrische Antriebe) hast du das am Rotorfluss-orientierte Koordinatensystem. Die dritte Zeile stelle ich nach I1A um, und bekomme den Sollstrom auf der q-achse. Den Sollstrom der D-achse berechne ich einfach mittles der Division durch die Hauptinduktivität. UND JETZT eigentlich doch ganz billig ( so wie ich denk): 1.)Sollstrom id und iq sind bekannt 2.) Transformation ins statorfeste System 3.)Umrechnung mit u = w * d Psi / dt von id und iq in ud und uq???? 4.)Betrag dieses Spannungsvektors in die PWM geben. 5.) Strom in allen drei phasen messen und ins dq0 transformieren 6.) Strommodell mit omega_mech, id,iq (istwerte ) bestimmen. Den Winkel in die Trafo geben. 7.) Einen Momentensprung aufgeben, so dass sich der Drehwinkel über der Zeit wie eine Parabel verhält ( Also eben beschleunigung mit einem gewissen moment bei NULL Last
Angehängte Dateien:
-

Rotorfluss.png
22 KB

Hier noch die Formel aus Schröder, die für Hermann doch entscheidend sind.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.