Mahlzeit, ich hab grad meine erste Schrittmotorsteuerung fertiggestellt (l297/l298). Nun möcht ich der Platine einen eigenen kleinen uC (attiny13) für Sensorik spendieren. Zum einen will ich die zwei Spannungen an den Sense-Widerständen messen. Zusätzlich dachte ich noch an eine Temperaturmessung. Meine eigentliche Frage ist jetzt aber ob es möglich ist zu ermitteln wann ich von der Betriebsfrequenz her in einen Bereich komme wo der Schrittmotor Schritte verliert. Bei steigender Drehzahl müsste doch der Effektivwert der Spulenspannung steigen und wenn dieser in die Grössenordnung der Betriebsspannung kommt kann der Strom nicht mehr nachgeregelt werden und der Schrittmotor verliert Schritte. Sind meine Überlegungen soweit noch richtig oder kann das so nicht funktionieren? lg much
Michael N. schrieb: > Meine eigentliche Frage ist jetzt aber ob es möglich ist zu ermitteln > wann ich von der Betriebsfrequenz her in einen Bereich komme wo der > Schrittmotor Schritte verliert. Bei steigender Drehzahl müsste doch der > Effektivwert der Spulenspannung steigen und wenn dieser in die > Grössenordnung der Betriebsspannung kommt Die Schrittfrequenz bei der das passiert, kannst du direkt aus der Spuleninduktivität ausrechnen. Das ist aber nicht kritisch. Es kommt mehr drauf an, dass der Motor das geforderte Drehmoment noch aufbringen kann. Lange vorher kann der Motor z.B. schon Schritte verlieren, wenn beim Ändern der Frequenz durch Trägheitskräfte zusätzlich zum statischen Drehmoment dynamische Lasten auftreten. Du müßtest also ganz wesentlich auch die Kräfte messen.
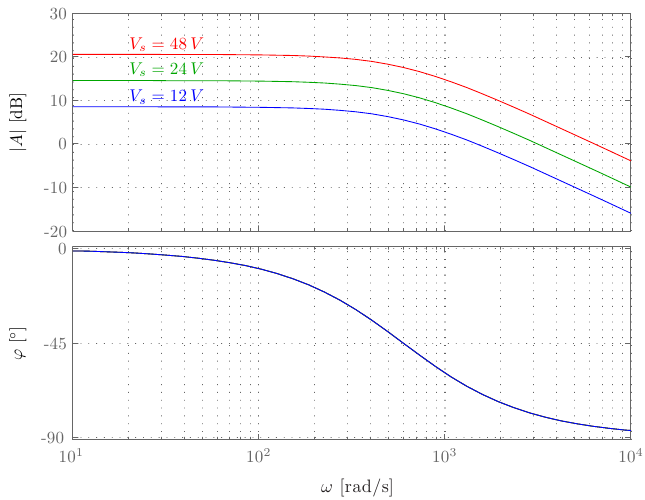
Ok, damit macht die Messung der Spulenspannung schon mal keinen Sinn (Währe vermutlich ohnehin knapp geworden mit den uC-Pins). Werner schrieb: > Die Schrittfrequenz bei der das passiert, kannst du direkt aus der > Spuleninduktivität ausrechnen. Dazu hätte ich noch eine Verständnisfrage. Ich hab mal das Bodediagramm der Übertragungsfunktion in Abhängigkeit der Betriebsspannung gezeichnet (siehe Anhang). Allerdings binn ich mir bei der Interpretation noch nicht 100%ig sicher da ich noch nie ein Bodediagramm im Zusammenhang mit einem Zweipunktregler gezeichet habe. Sehe ich das richtig, dass Zweipunktregler ab der Durchtrittsfrequenz nicht mehr arbeiten kann, da ja die Verstärkung < 1 wird und damit mein Vref nicht mehr erreicht werden kann?
Angehängte Dateien:
-

bode.png
28 KB
im vorangegangenen Beitrag hab ich leider die falsche Datei angehängt.
Zur Überwachung und optimierten Ansteuerung des Schrittmotors (auch unter Last) ist es gut die aktuelle Position mit einem Encoder zu messen, bzw. die Schritte zu überwachen. Die magnetischen Hall-Encoder,-ICs, wie z.B. der iC-MH (12-Bit Auflösung der 360 Grad) haben alles auf einem Chip und es wird noch ein Magnet auf der Achse benötigt. Hier gibt es das deutsche Datenblatt und Applikationen http://www.ichaus.biz/keyword/Magnetic%20Encoder%20iCs
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.