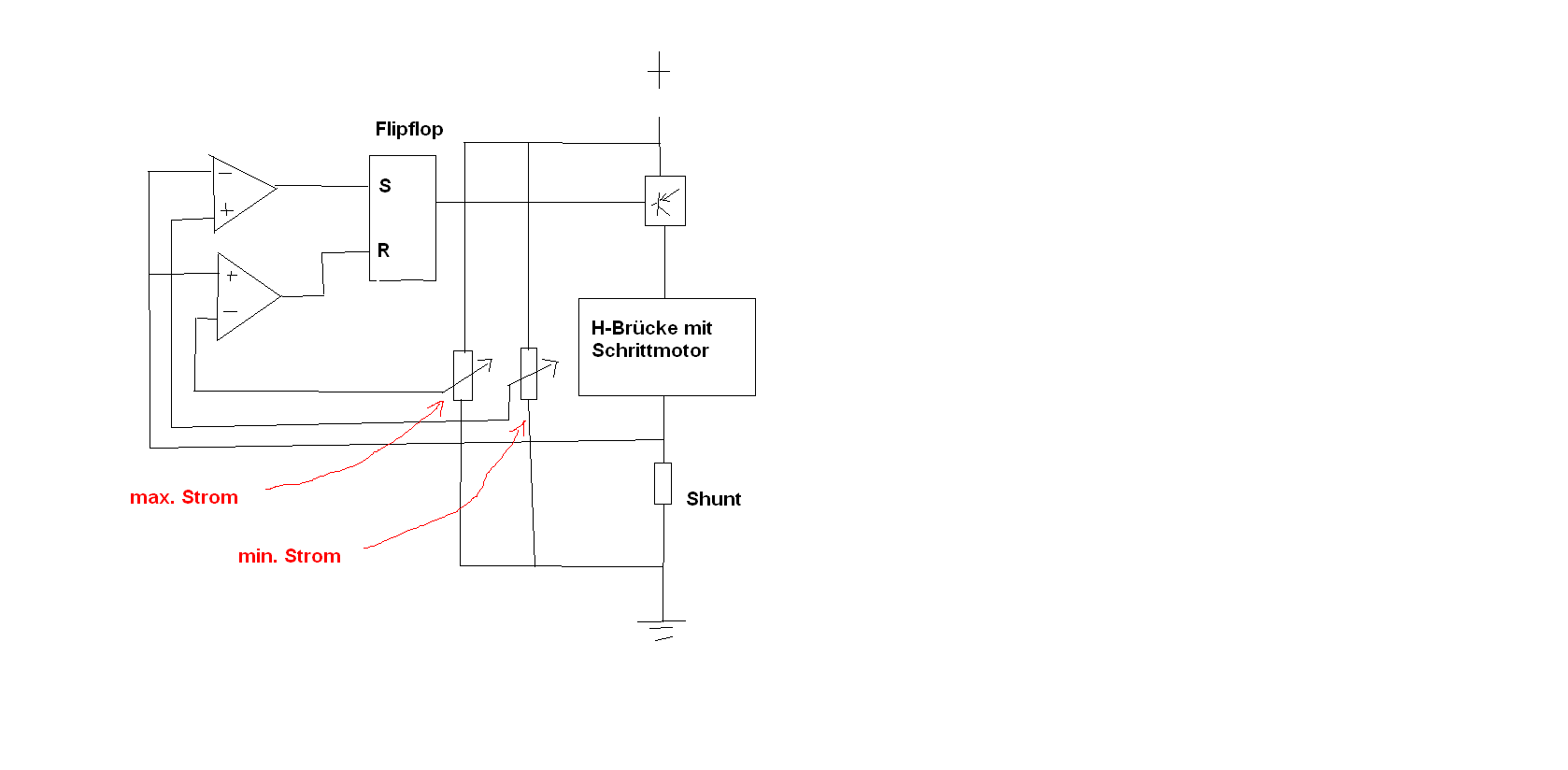
Hallo Leute, ich experimentiere grad mit einem Schrittmotor herum und hab da eine dumme frage zum chopperbetrieb von Schrittmotoren. Soweit ich gegooglet habe sorgt das choppern der spannungszufuhr für eine Strombegrenzung bei niedrigen drehzahlen vom Schrittmotor. Dh. man kann ihn mit einer Höheren Spannung betreiben. Bei hohen drehzahlen, d.h. hohe Umschaltfrequenzen verhindert die motorinduktivität das schnelle ansteigen des stroms. Durch die höhere Spannung wird das dann Ausgeglichen. Stimmt das so? Wird die Pulsweite, also ich mein die "effektive Spannungshöhe" vom PWM-Choppersignal das einen Schrittmotor versorgt erhöht, wenn der Motor beschleunigt wird oder ist das drehzahlabhängig oder ist das immer das gleiche signal? Und ich hab noch ein Schaltungsbild angehängt. Kann das so funktionieren?
Angehängte Dateien:
-

SchrittmotorChopp.PNG
8,7 KB
Angehängte Dateien:
-

SchrittmotorChopp.PNG
10 KB
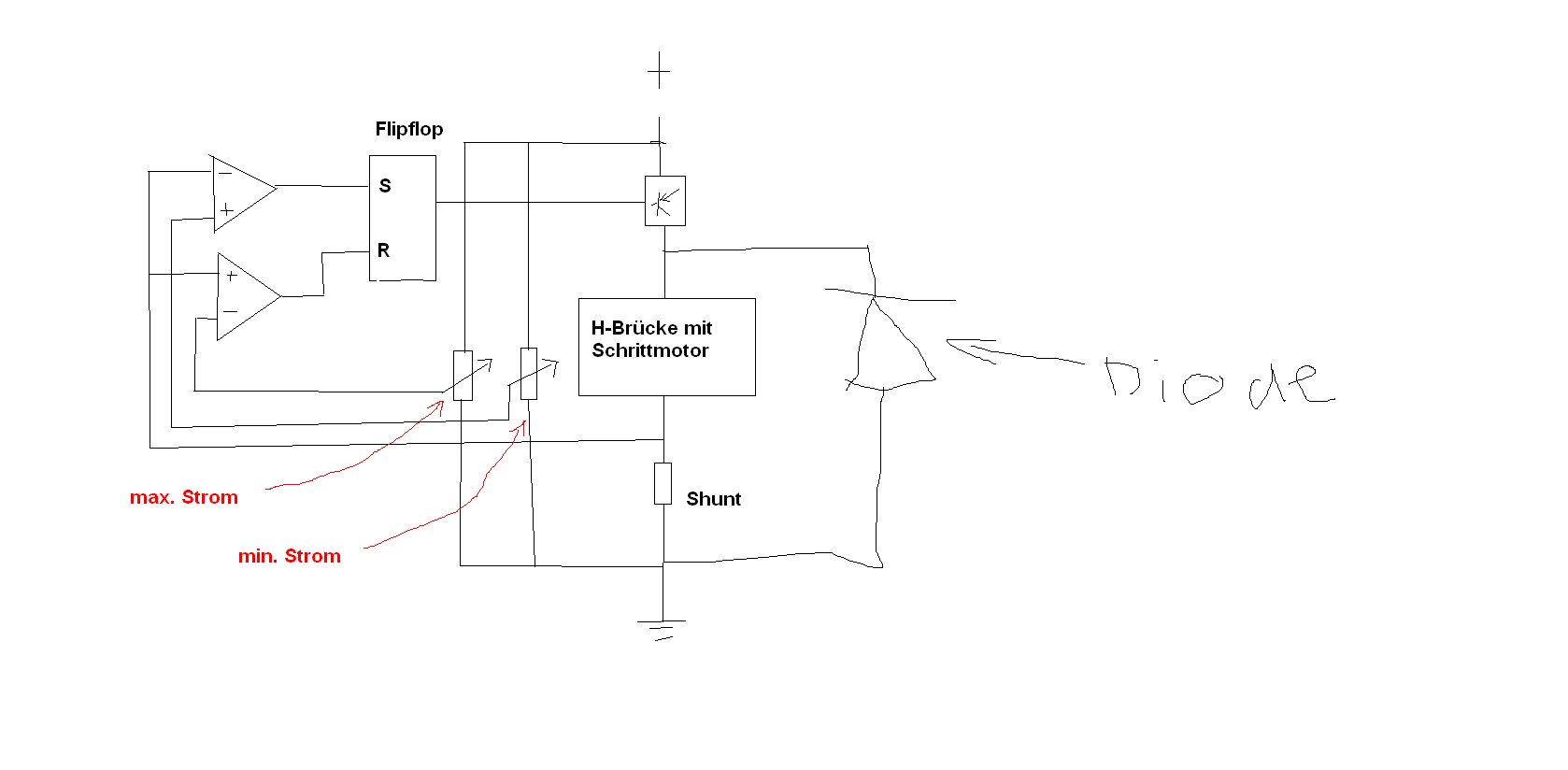
Entschuldigung ich vergas noch eine diode einzuzeichnen, da sonst ja im ausgeschalteten zustand über den Shunt kein Strom fließen kann Und Sorry auch für die doppelt hochgeladenen Bilder sollte eig eins sein, jez sinds drei :)
> Kann das so funktionieren? So ist das normalerweise nicht aufgebaut, sondern es wird alle Nase lang (fester Oszillatortakt) das FlipFLip gesetzt, und bei Erreichen des Maximalstroms für den Test der Periode abgeschaltet. Schau halt mal in ein Datenblatt z.B. des L297 oder TB6560A, wie dies in der Realität passiert.
M. M. schrieb: > ich experimentiere grad mit einem Schrittmotor herum und hab da eine > dumme frage zum chopperbetrieb von Schrittmotoren. Soweit ich gegooglet > habe sorgt das choppern der spannungszufuhr für eine Strombegrenzung bei > niedrigen drehzahlen vom Schrittmotor. Dh. man kann ihn mit einer > Höheren Spannung betreiben. Bei hohen drehzahlen, d.h. hohe > Umschaltfrequenzen verhindert die motorinduktivität das schnelle > ansteigen des stroms. Durch die höhere Spannung wird das dann > Ausgeglichen. Stimmt das so? Jo, stimmt soweit. Folge: viel höheres Drehmoment als bei Nennspannung. > Und ich hab noch ein Schaltungsbild angehängt. Kann das so > funktionieren? Der Transistor vor der Brücke braucht es nicht, man schaltet direkt die FETs in den Halbbrücken aus. Ausserdem hat man für jede Phase einen eigenen Chopper. Dass die Potis an der Versorgungsspannung hängen macht auch nicht viel Sinn, denn die ist normalerweise nicht sehr stabil. Und wie von MaWin schon erwähnt: Schau dir mal z.B. den L297 an. Nachtrag: Und schau dir mal die zwei Betriebsarten "Fast Decay" und "Slow Decay" an, ich glaube im Roboternetz gibts da eine schöne Erklärung, musst mal danach suchen.
Angehängte Dateien:
-

SchrittmotorChopp.PNG
17 KB
Danke für die schnellen Antworten! Die Links zu den Datenblättern muss ich noch anschaun (ich mag datenblätter nicht so gern XD) Aber so wie ich das verstanden habe funktioniert das so wie im Angehängtem Bild? Der Strom regeld sich von "selber" durch den Schwellwert? Dürfte doch eig kein großes problem sein so einen Treiber selber zu Bauen.
M. M. schrieb: > Aber so wie ich das verstanden habe funktioniert das so wie im > Angehängtem Bild? > Der Strom regeld sich von "selber" durch den Schwellwert? Ich glaube das kommt so hin. Garantieren kann ich dir das aber nicht, so extrem gut kenne ich mich mit Schrittmotoren auch wieder nicht aus... > Dürfte doch eig kein großes problem sein so einen Treiber selber zu > Bauen. Kommt darauf an welche Ströme du da fliessen lassen willst. Ich würde mal sagen, unter einem Ampere sollte das noch einigermassen gehen. Bei höheren Strömen kanns dann ganz schön tricky werden, weil extreme Spannungsspitzen auftreten können, vorallem beim schnellen Bremsen. Ein ausgezeichnetes Platinenlayout ist dann absolut Pflicht! So ganz einfach ist das nicht. Wenn du nur ein einziges kurzes Mal den Strom zu spät abstellst sind deine FETs hin. Die ganze Chopperelektronik muss also absolut ausfallsicher sein. Hatte selber schonmal einen Wackelkontakt beim Chopper-Kondensator vom L297, der L6203 hat mich dann sofort mit Gehäusesplittern beschossen als wäre Sprengstoff in dem Teil gewesen ;-) Aber es sollten im Internet eigentlich einige Schaltungen von diskret aufgebauten Schrittmotorensteuerungen zu finden sein.
> Aber so wie ich das verstanden habe funktioniert das so wie im > Angehängtem Bild? Nein, das ist ja diskontinuielicher Betrieb, üblich wäre kontinuierlicher Betrieb, und der Abschaltmoment kann durchaus hinter der fallenden Flanke des Choppertaktes liegen. Kann man alles in Datenblättern nachlesen, statt es selbst noch mal falsch neu erfinden zu müssen.
@MaWin: was ist mit kontinuierlicher betrieb gemeint? @UrbanB.: vll reichts ja wenn man eine feinsicherung einbaut, ich werds zumindest mal versuchen so einen treiber zu bauen. Da hab ich gleich noch mal eine Frage: im Internet steht das beim mikrostepping die Motorspulen unterschiedlich bestromt werden. Also ich mein beim vollschritt gibts ja nur an und aus. und beim mikrostepping können dann die spulen auch zu 50% z.B. bestromt werden. Wird das dann auch mit dem Choppen realisiert?, also dass da dann bei einem mikroschritt die Strom-Abschalt-Schwelle niedriger ist?
Angehängte Dateien:
-

SchrittmotorChopp.PNG
3,6 KB
ich weis ich frag zuviel, trotzdem: bei so einem Schrittmotor gibt es für jede spule eine H-Brücke, also 4 transistoren. Warum nimmt man dann nicht einfach eine negative Spannung -> man bräuchte nur halb so viel transen auch der spannungsfall von einer c-e-strecke würde wegfallen. Liegts vll am aufwand eine neg. Spannung bereitzustellen?
M. M. schrieb: > @UrbanB.: vll reichts ja wenn man eine feinsicherung einbaut, ich werds > zumindest mal versuchen so einen treiber zu bauen. Kann sein dass das reicht, ich weiss es nicht. Sollte aber sicher eine flinke Sicherung sein. Wie grosse Schrittmotoren willst du denn ansteuern? Also für welchen Strom soll die Steuerung ausgelegt sein? > Wird das dann auch mit dem Choppen realisiert?, also dass da > dann bei einem mikroschritt die Strom-Abschalt-Schwelle niedriger ist? Ja, die Referenzspannungen werden mit (schnellen) D/A-Wandler vorgegeben > Warum nimmt man dann nicht einfach eine negative Spannung Mit nur ein paar zusätzlichen Bauteilen lässt sich aus demselben Netzgerät (bzw. derselben Spannung) ein beachtlich höheres Drehmoment aus demselben Motor herausholen, das ist doch Grund genug ;-) Gibt aber bestimmt noch einige Gründe mehr...
Angehängte Dateien:
-

SchrittmotorChopp.PNG
6,3 KB -

Kopie_von_SchrittmotorChopp.PNG
11 KB -

DSC00066.JPG
220 KB -

DSC00065.JPG
240 KB
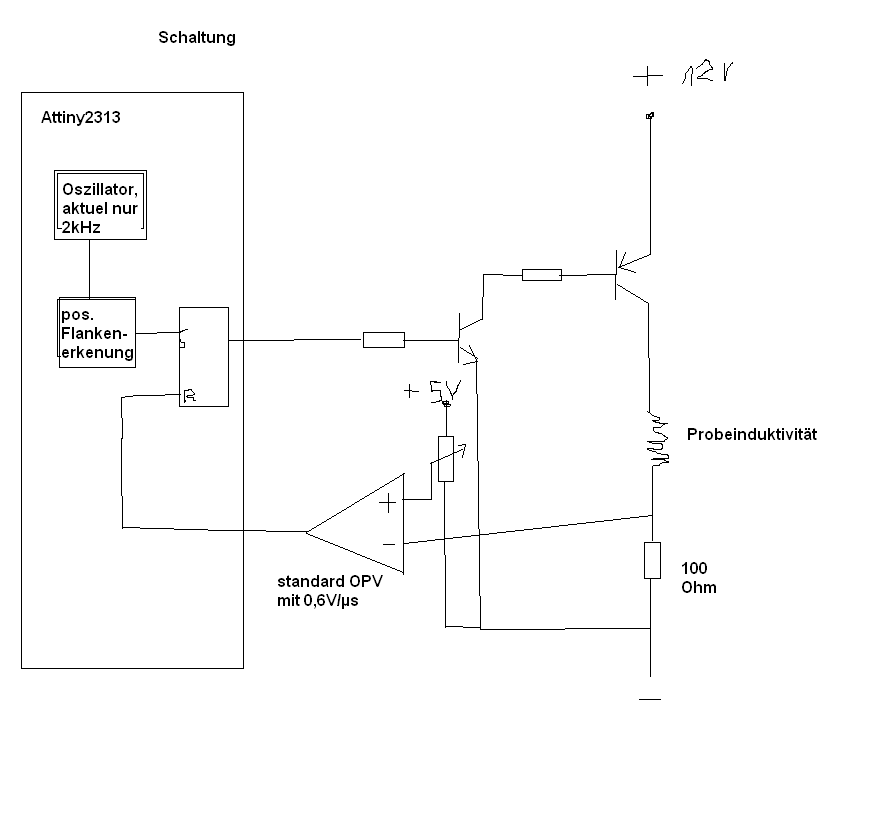
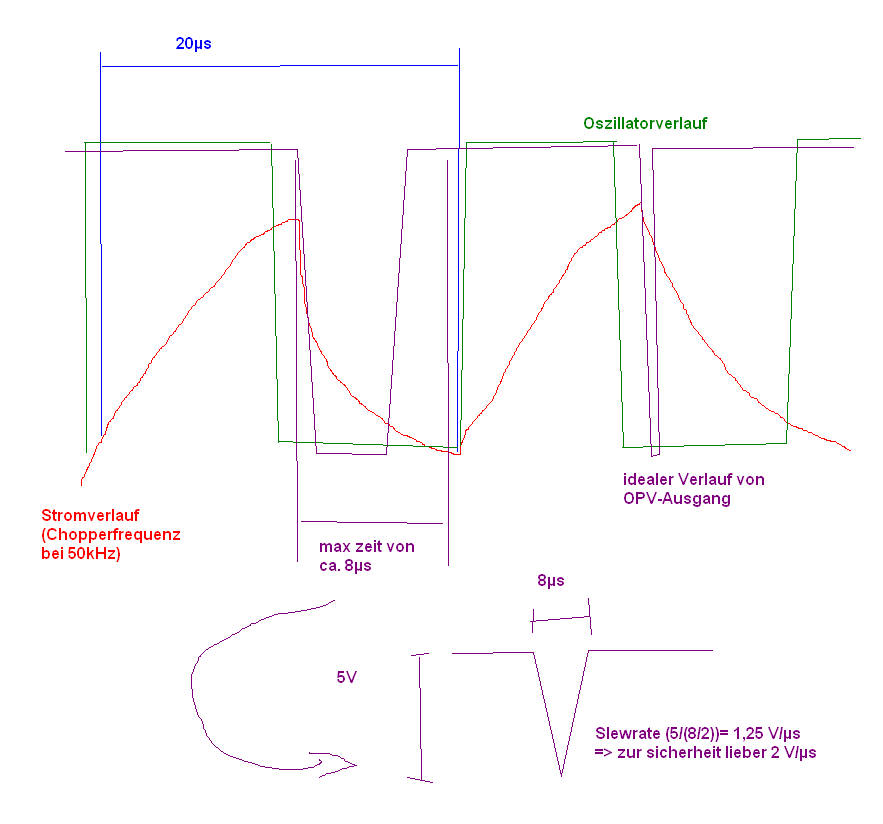
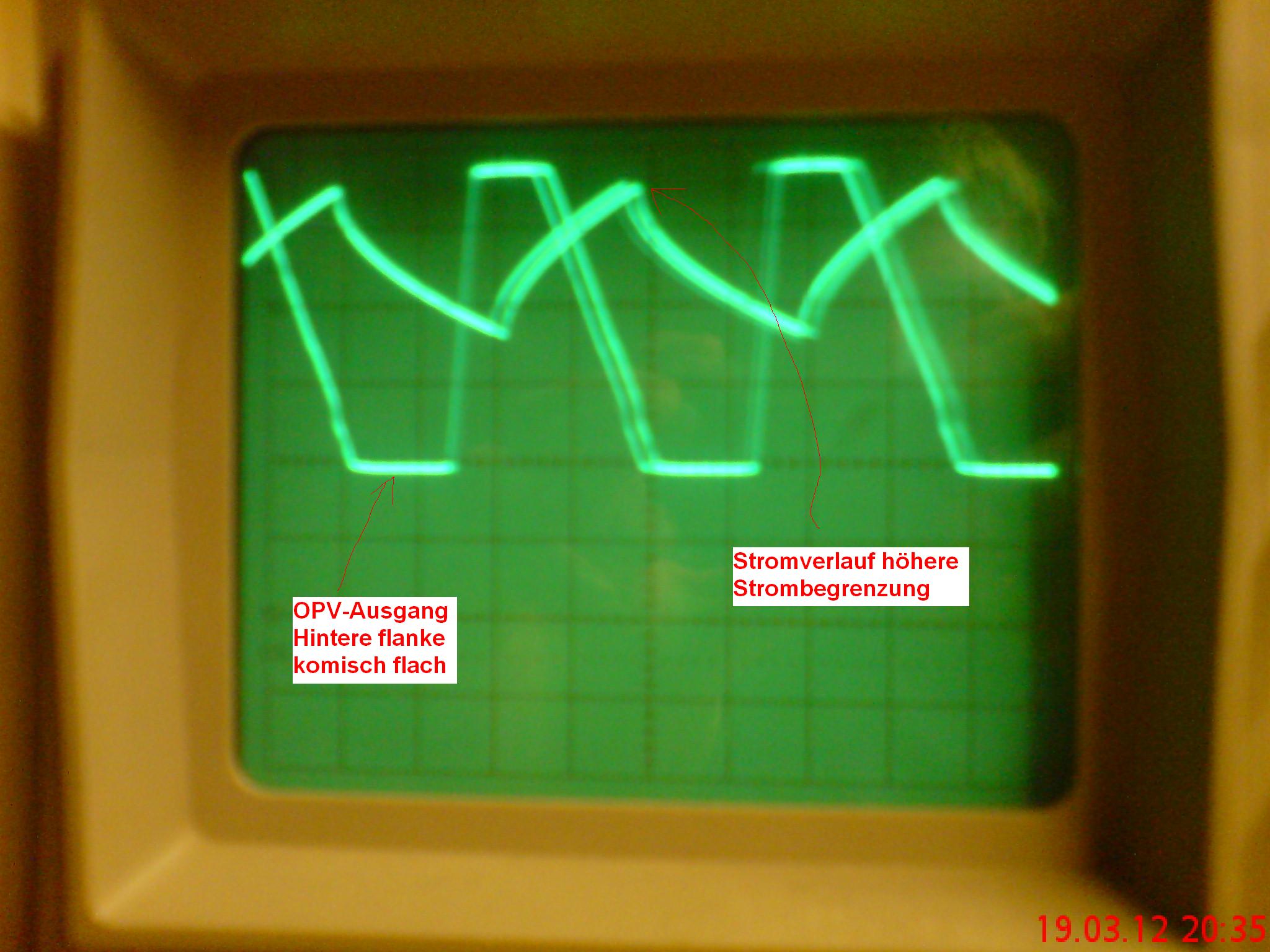
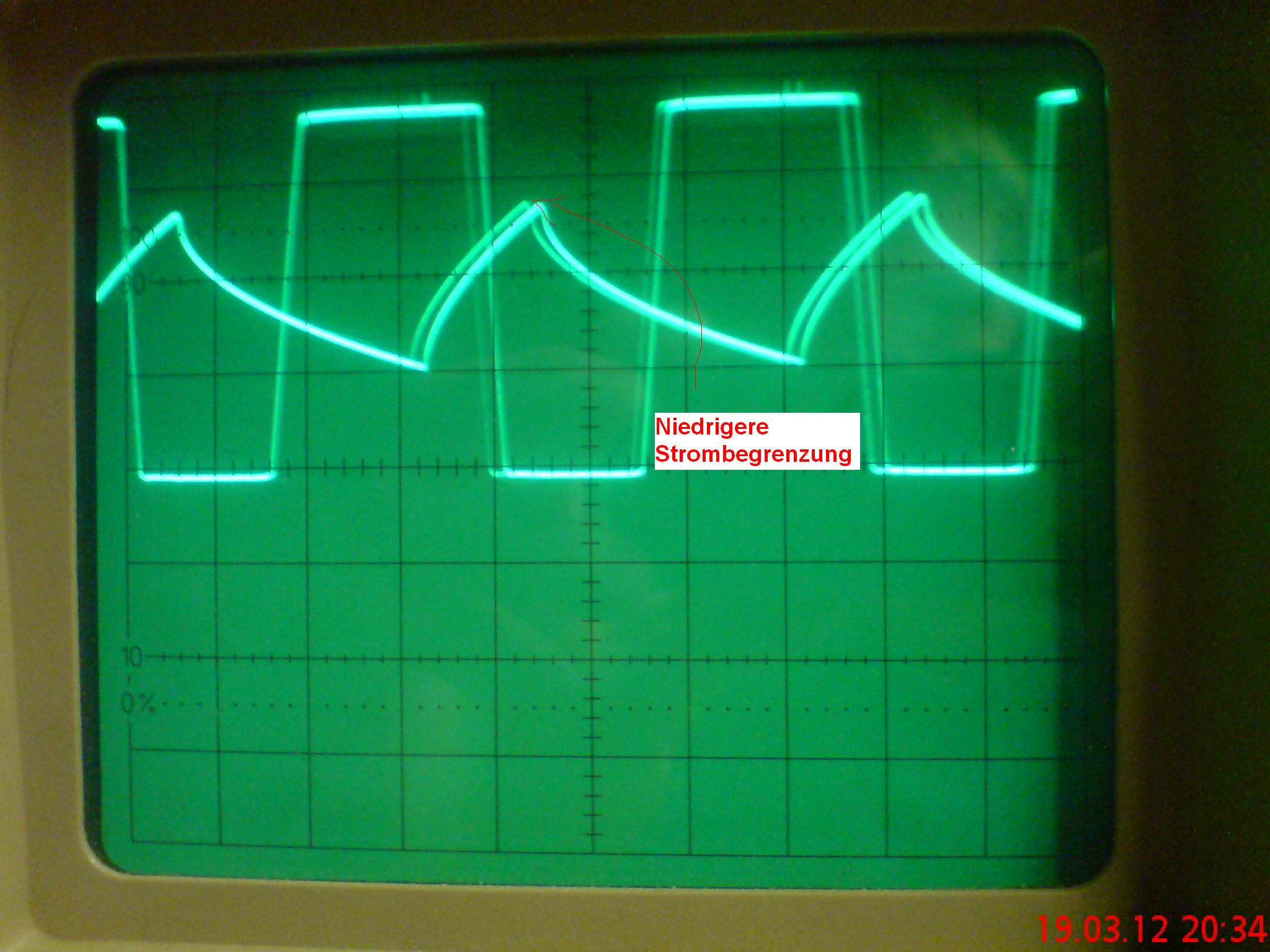
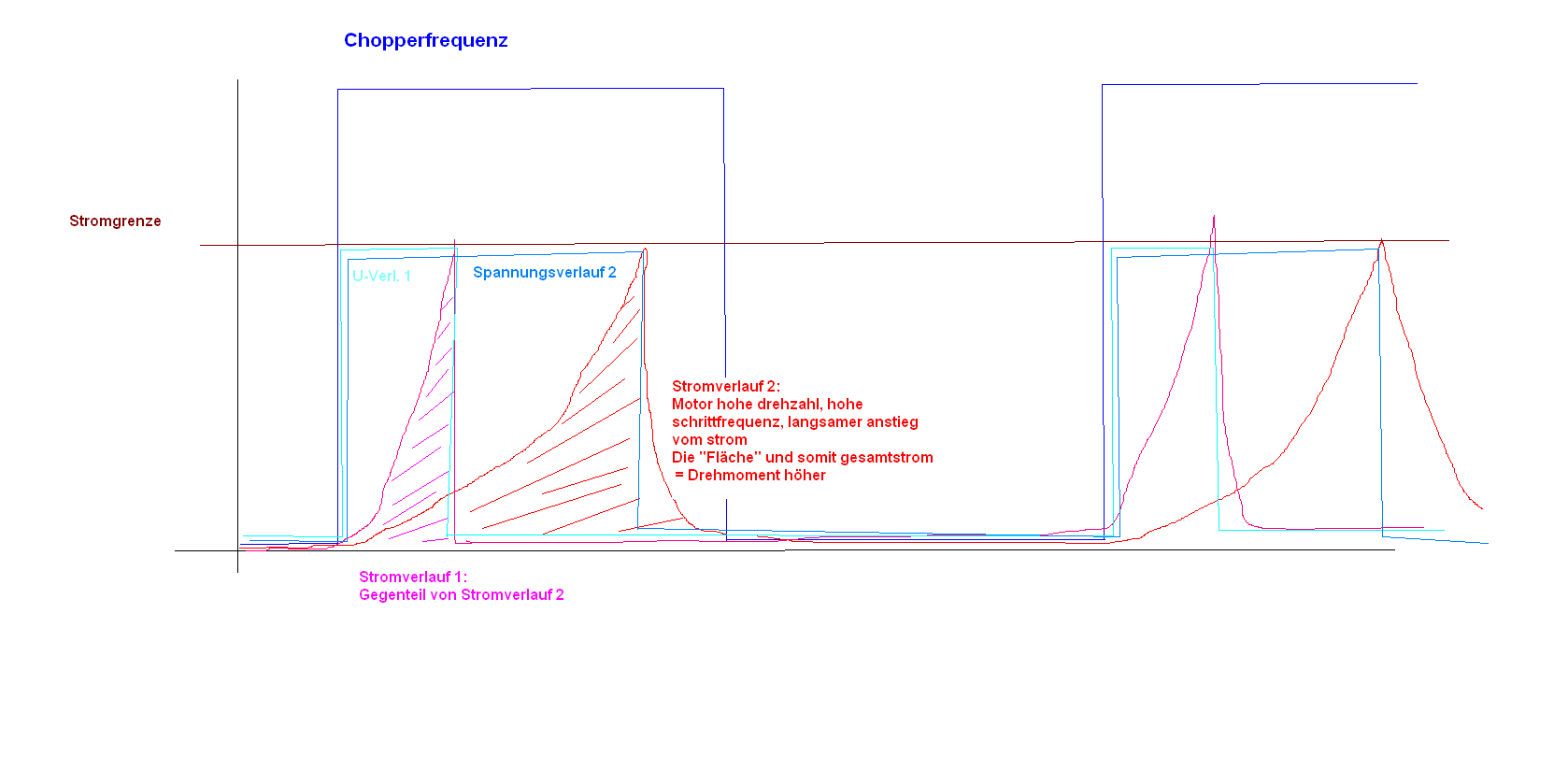
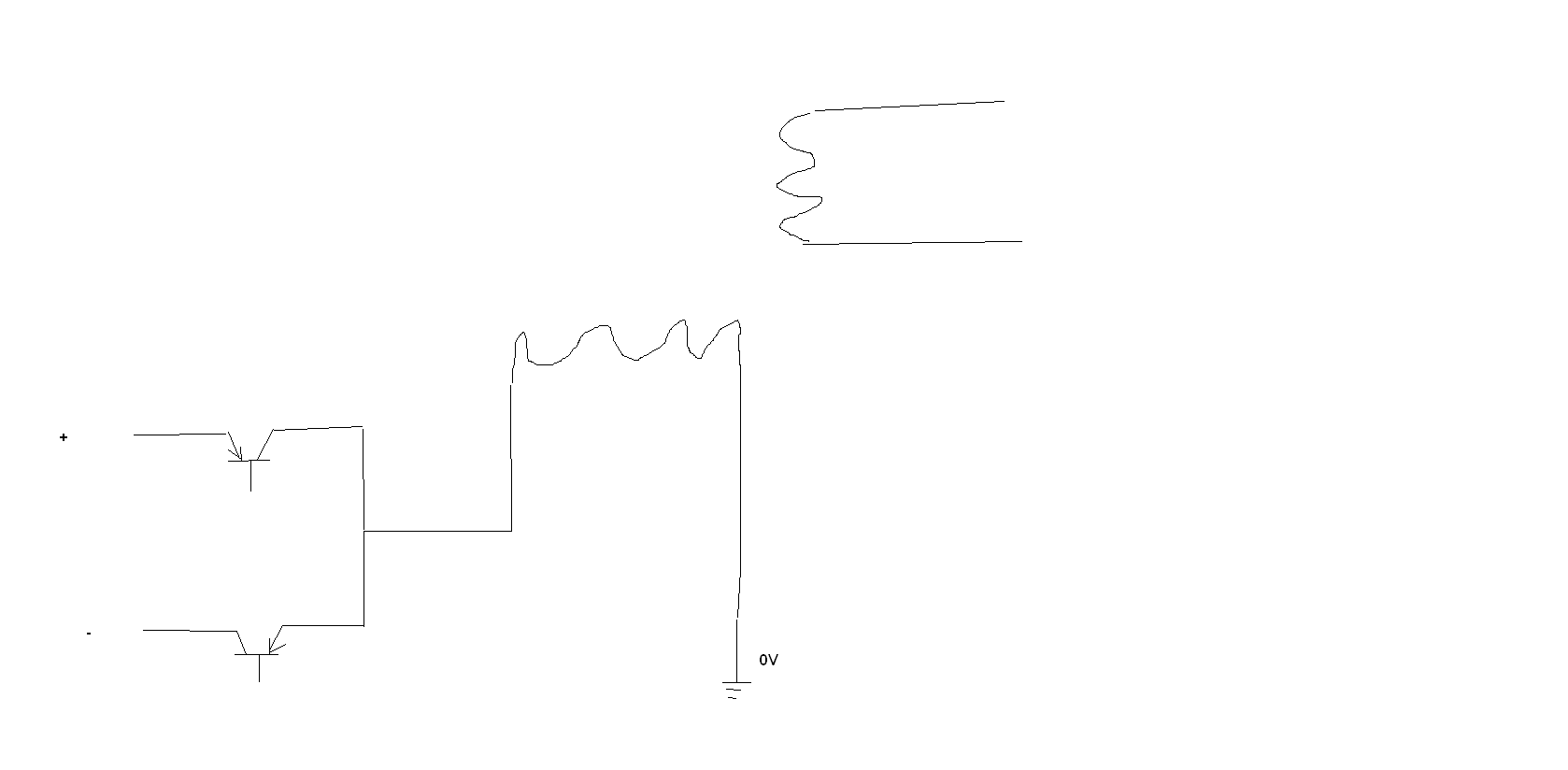
Habe jezt ein bissel rumgebastelt, und aus einem normalen OP-Verstärker und einem Widerstand sowas wie einen Strombegrenzer durch choppern gemacht. Der Attiny wertet den ausgang des ops aus und enthält auch die "logik" und den Oszillator für die chopperfrequenz: Oszillator steigende Flanke, Treibertransistor ein (Spannung ein), Strom wird wegen der induktivität (einer Testspule) langsam größer, mehr Spannung fällt am Widerstand ab, OP-Ausgang geht auf low, Attiny schaltet den Transistor bis zur nächsten Steigenden Flanke des internen Oszillators ab. Ein Problem ist bei mir das bei höherer Strombegrenzung die hintere Flanke des OPV-Ausgangs komisch flach wird! Das Ergebnis sieht fürs erste gar nicht mal schlecht aus (Bild vom Oszi). Allerdings ist die Chopperfrequenz viel zu niedrig: Wenn ich den Schrittmotor mit 3000 UPM laufen lassen möchte sind das bei 200 Vollschritten/Umdrehung (3000 UPM * 200 Schritte / 60 sek) 10000 Vollschritte in der sekunde. Da aber die Motorwicklungen nur bei jedem 2. Vollschritt umgepolt werden müssen (die zwei "Wicklungssignale" sind ja phasenversetzt) sind es (10000 / 2 ) 5000 Umpolungen der Wicklung in der Sekunde, also ein Rechtecksignal von 5kHz. Die chopperfrequenz muss aber höher sein (ich sag mal so aus der hüfte geschossen 10x höher) also 50kHz (gezeichnetes Bild). Da an der Spitze von der Stromkurfe der OPV auf low schaltet (Strombegrenzung) muss er bis zur nächsten steigenden Oszillatorflanke wieder auf high sein, sonst wird ein Takt übersprungen. 1.: Wenn ich das alles richtig verstanden, bzw. gerechnet habe, komme ich auf eine slew rate von min. 2 V/µs. Kann das hinkommen??? Habe dann bei Conrad gekuckt und hab nichts gescheites gefunden außer einen, der 250 V/µs hat aber über 11€ das Stück kostet! Außerdem wäre das irgendwie overkillmäßig. 2.: Und ist das eig überhaupt der Ausschlaggebende Wert auf den ich achten sollte (ich meine die slew rate)? 3.: Wie kann es sein das ein Microkontroller, der i-wie viel mehr kann, 2€ kostet, und ein OPV 11€? ist das wegen den analogen spannungen auswerten so schwierig, oder ist so ein Attiny einfach ein massenprodukt? Danke schonmal dafür wenn sich einer die mühe gemacht hat das alles durchzulesen, aber ich checks einfach nicht :-)
Nur nochmal zum Verständnis: wenn der OPV-Ausgang auf Low ist, ist die Stromgrenze überschritten. High: alles ok Und ich hab noch diese Seite gefunden: http://www.rn-wissen.de/index.php/Operationsverst%C3%A4rker#Liste_g.C3.A4ngiger_Typen_von_Operationsverst.C3.A4rkern welchen OPV würdet ihr nehmen?
ich glaub ich weis jez was mit diskontinuierlich gemeint war: das es nicht lauter stromzipfel sind, sondern dauernd strom fließt...
Diskontinuierlich bedeutet, dass der Strom in der Induktivität auf 0 sinkt.
> Ein Problem ist bei mir das bei höherer Strombegrenzung die > hintere Flanke des OPV-Ausgangs komisch flach wird! Ohne Freilaufdiode wird das eh tödlich. Deiner Schaltung fehlt noch: a) Eine Abschaltung (RESET) des FlipFlops auch wenn der Strom nicht erreicht wurde am Ende des Taktes, sonst würde bei zu hochohmiger Last das FF nie wieder gelöscht werden, immer Strom fliessen. b) Dein PNP wird zwar eingeschaltet (durch Stromfluss nach Masse) aber nicht wieder schnell ausgeschaltet (niemand zieht die Basis nach +Ub). Ganz allgemin betrachtet sind Bipolare Transistoren für PWM eher schlecht, weil viel zu langsam für "unhörbar". c) Die Freilaufiode. d) Eine Filterung vor kurzen kapazitiv gekoppelten Spannungsspitzen am OpAmp-Eingang. e) ganz allgemein eine Geschwindigkeitsbetrachtung, ein Komparator heisst Komparator weil er besser kompariert als ein OpAmp - oder so ähnlich.
a) das macht ja nichts, dann muss der Strom eh nicht begrenzt werden oderund die Spannungsversorgung ist zu gering b)uups stimmt! blöd von mir c)stimmt auch hab ich aber gottseidank nur in meiner Zeichnung vergessen d)ein Tiefpass vor dem op eingang? e) Komparator hört sich gut an muss mal schaun ob ich aus meiner Platinenwiederverwertungsschatztruhe einen rauslöten kann. in welchem Gerät kann denn so ein Komparator verbaut sein? ... muss nochmal ein bisschen rumspielen
Wikipedia: >Ein Komparator ist immer ein Differenzverstärker (gelb) mit nachfolgendem >Verstärker (orange) und einer Ausgangsstufe (blau). Er enthält – im >Gegensatz zum Operationsverstärker – absichtlich keine >Frequenzkompensation, um am Ausgang eine hohe Flankensteilheit zu erzielen. >Deshalb kann er nicht mit Gegenkopplung betrieben werden, er würde als >Oszillator mit schwer definierbarer Frequenz wirken. >Herkömmliche Operationsverstärker, welche auf den linearen Betrieb mit >Gegenkopplung ausgelegt sind, sollten nicht als Komparator verwendet >werden, da deren Erholzeiten aus der Sättigung meist zu lange bzw. >undefiniert sind. Außerdem besitzen fast alle Operationsverstärker intern >einen Kondensator zur Frequenzgangskompensation, der die Verstärkung bei >hohen Frequenzen reduziert. Genau das ist bei Komparatoren unerwünscht. >Integrierte Schaltungen wie LM339 oder LM393 besitzen mehrere Komparatoren >auf einem Chip. hätt ich vorher lesen sollen :-)
... so ich verwende jezt den Analogkomparator von meinem attiny. Eigentlich wollte ich ja outsourcen, statt insourcen, aber egal :). Das Choppen haut so wunderbar hin. In der gewünschten Frequenz, und auch die Stromstärke kann man gut verstellen. auch einen Schrittmotor hab ich schon daran angeschlossen: Er lässt sich nur mit einiger kraft drehen. jezt will ich das ganze diskret aufne platine draufhaun. Muss dazu noch einen Komparator, N555-Timer und ein Flipflop suchen bzw. bestellen. Dann fehlt nur noch die logik für die eigentlichen schritte.
Hallo M. M.! > Allerdings ist die Chopperfrequenz viel zu niedrig: > Wenn ich den Schrittmotor mit 3000 UPM laufen lassen möchte sind das bei > 200 Vollschritten/Umdrehung (3000 UPM * 200 Schritte / 60 sek) 10000 > Vollschritte in der sekunde. > Da aber die Motorwicklungen nur bei jedem 2. Vollschritt umgepolt werden > müssen (die zwei "Wicklungssignale" sind ja phasenversetzt) sind es > (10000 / 2 ) 5000 Umpolungen der Wicklung in der Sekunde, also ein > Rechtecksignal von 5kHz. Die 3000 UPM wirst Du aber nur erreichen, wenn Du Spannungen >50V verwendest und einen Motor mit niedriger Nennspannung hast. Ansonsten wirst du eher bei einigen hundert bis vielleicht 1000 UPM landen. Mit freundlichen Grüßen Thorsten Ostermann
deswegen ja das choppern :) ich denk mal das ich da mit 45V arbeiten werde. Jedenfalls bau ich jezt die logik mit dazu, und die H-Brücke und dann schau ich mal wie schnell mein motor läuft, oder ob überhaupt.
M. M. schrieb: > Außerdem besitzen fast alle Operationsverstärker intern > einen Kondensator zur Frequenzgangskompensation, der die Verstärkung > bei hohen Frequenzen reduziert. "hohe Frequenz" ist schmeichelhaft formuliert. Einige Hertz würde ich nicht als "hoch" Bezeichnen. Im Datenblatt gibt es dazu die Angabe zum Verstärkungs-Bandbreite-Produktes. Bei höher Verstärkung in der Nähe der Leerlaufverstärkung macht sich das schnell bemerkbar.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.