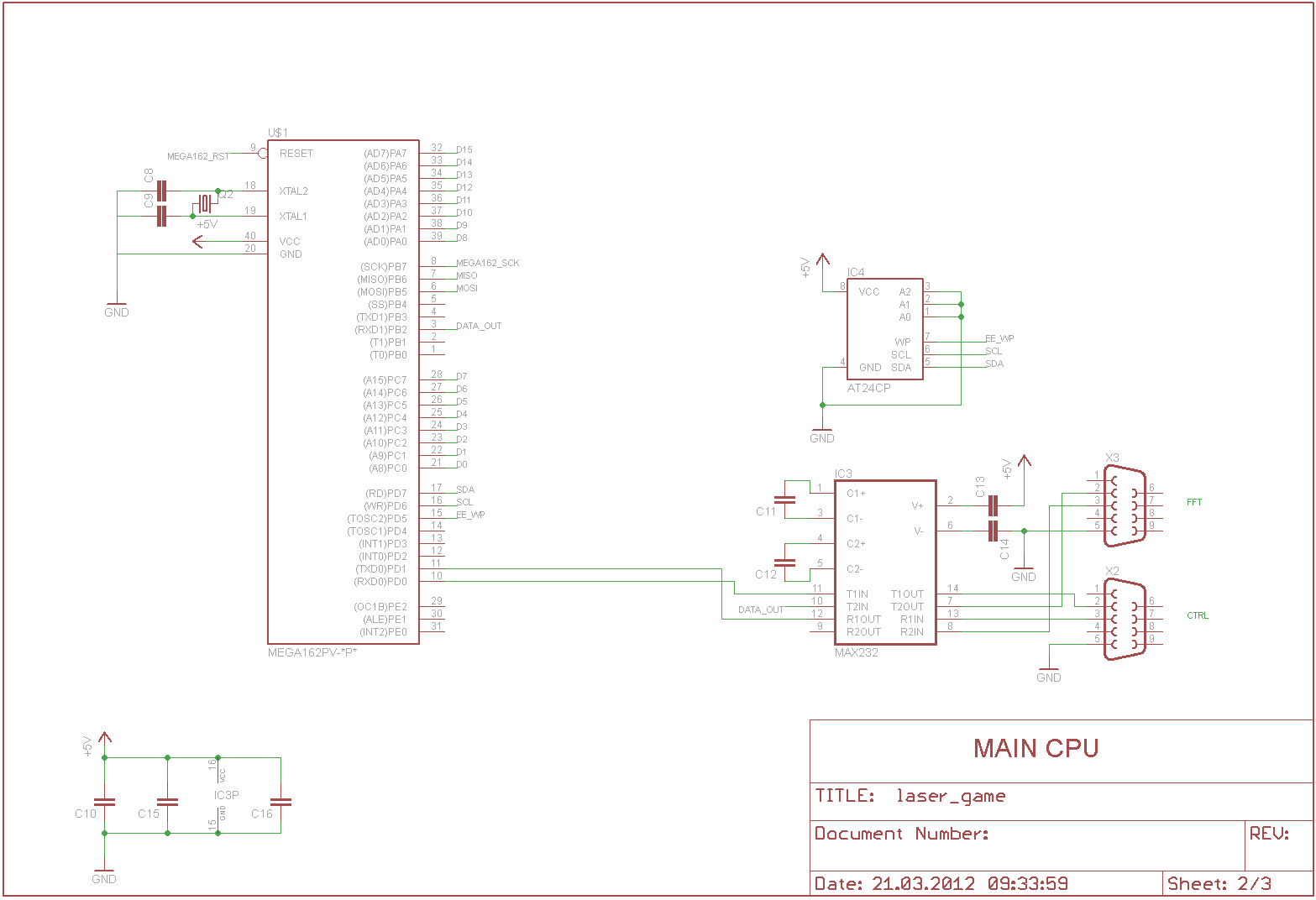
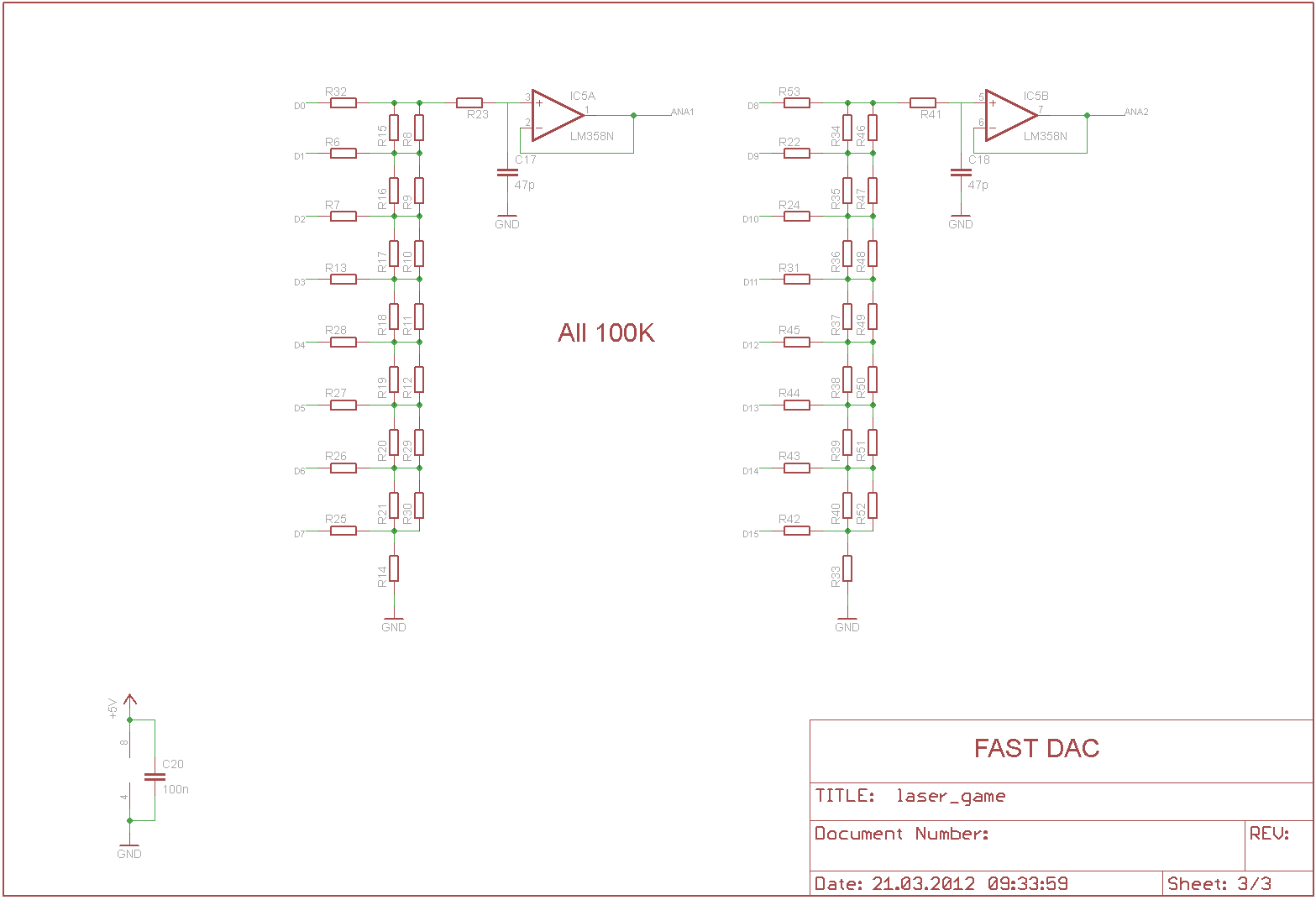
Hallo Forum , ich habe ein Problem und hoffe ihr könnt mir Helfen. Das folgende ist bei zwei Mega162 das selbe und beide sind neu, also denke ich, ich mach nen fehler. Ich habe am PortA und PortC eine R2R Netzwerk. Damit gebe ich zwei Sägezahn Signale aus. Nach dem Programmieren funktioniert alles super. Aber wenn ich den Strohm nehme und wieder gebe (Aus/Einschalten) dann macht der MCU absoluten blödsinn. Muss ich die Leitung vom Mega (ALE) auch beschalten ? lg Lois
Hi Da vermutlich der Fehler in der Software liegt, würd ich sagen, du machst deinen Code öffentlich. So aus dem Bauch heraus, ist das ein Zielscheibenschießen in der Dunkelkammer. Gruß oldmax
Lois schrieb: > Ich habe am PortA und PortC eine R2R Netzwerk. Damit gebe ich zwei > Sägezahn Signale aus. Nach dem Programmieren funktioniert alles super. > Aber wenn ich den Strohm nehme und wieder gebe (Aus/Einschalten) dann > macht der MCU absoluten blödsinn. Auch dann noch, wenn Du RESET nach dem Powerup mal kurz auf low ziehst? Vielleicht halten die Ausgangskondensatoren Deines Netzteils/Schaltung auch nach dem Abschalten noch für längere Zeit die (geringere) Spannung und Dein µC erfährt deshalb keinen ordentrlichen Reset? Zeig mal das Schaltbild. Die BrownOut-Detector-Fuses zu setzen könnte helfen.
1 | #include <mega162.h> |
2 | #include <stdio.h> |
3 | #include <i2c.h> |
4 | #include <delay.h> |
5 | |
6 | |
7 | unsigned char value_a; |
8 | unsigned char value_b; |
9 | unsigned char size; |
10 | unsigned char game_size; |
11 | unsigned char offset_a; |
12 | unsigned char offset_b; |
13 | char calc_a=1; |
14 | char calc_b=1; |
15 | |
16 | unsigned char drehen(unsigned char value); |
17 | void uart1en(unsigned char value); |
18 | |
19 | // USART0 Receiver interrupt service routine
|
20 | interrupt [USART0_RXC] void usart0_rx_isr(void) |
21 | {
|
22 | char status,data; |
23 | status=UCSR0A; |
24 | }
|
25 | |
26 | // USART1 Receiver interrupt service routine
|
27 | interrupt [USART1_RXC] void usart1_rx_isr(void) |
28 | {
|
29 | char status,data; |
30 | status=UCSR1A; |
31 | }
|
32 | |
33 | |
34 | // Timer1 overflow interrupt service routine
|
35 | interrupt [TIM1_OVF] void timer1_ovf_isr(void) |
36 | {
|
37 | |
38 | }
|
39 | |
40 | void main(void) |
41 | {
|
42 | // Declare your local variables here
|
43 | |
44 | // Crystal Oscillator division factor: 1
|
45 | #pragma optsize-
|
46 | CLKPR=0x80; |
47 | CLKPR=0x00; |
48 | #ifdef _OPTIMIZE_SIZE_
|
49 | #pragma optsize+
|
50 | #endif
|
51 | |
52 | // Input/Output Ports initialization
|
53 | // Port A initialization
|
54 | // Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
|
55 | // State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
|
56 | PORTA=0x00; |
57 | DDRA=0xFF; |
58 | |
59 | // Port B initialization
|
60 | // Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
|
61 | // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
|
62 | PORTB=0x00; |
63 | DDRB=0x00; |
64 | |
65 | // Port C initialization
|
66 | // Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
|
67 | // State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
|
68 | PORTC=0x00; |
69 | DDRC=0xFF; |
70 | |
71 | // Port D initialization
|
72 | // Func7=In Func6=In Func5=In Func4=Out Func3=In Func2=Out Func1=In Func0=In
|
73 | // State7=T State6=T State5=T State4=0 State3=T State2=0 State1=T State0=T
|
74 | PORTD=0x00; |
75 | DDRD=0x14; |
76 | |
77 | // Port E initialization
|
78 | // Func2=In Func1=In Func0=In
|
79 | // State2=T State1=T State0=T
|
80 | PORTE=0x00; |
81 | DDRE=0x00; |
82 | |
83 | // Timer/Counter 0 initialization
|
84 | // Clock source: System Clock
|
85 | // Clock value: Timer 0 Stopped
|
86 | // Mode: Normal top=0xFF
|
87 | // OC0 output: Disconnected
|
88 | TCCR0=0x00; |
89 | TCNT0=0x00; |
90 | OCR0=0x00; |
91 | |
92 | // Timer/Counter 1 initialization
|
93 | // Clock source: System Clock
|
94 | // Clock value: 57,600 kHz
|
95 | // Mode: Normal top=0xFFFF
|
96 | // OC1A output: Discon.
|
97 | // OC1B output: Discon.
|
98 | // Noise Canceler: Off
|
99 | // Input Capture on Falling Edge
|
100 | // Timer1 Overflow Interrupt: On
|
101 | // Input Capture Interrupt: Off
|
102 | // Compare A Match Interrupt: Off
|
103 | // Compare B Match Interrupt: Off
|
104 | TCCR1A=0x00; |
105 | TCCR1B=0x04; |
106 | TCNT1H=0x00; |
107 | TCNT1L=0x00; |
108 | ICR1H=0x00; |
109 | ICR1L=0x00; |
110 | OCR1AH=0x00; |
111 | OCR1AL=0x00; |
112 | OCR1BH=0x00; |
113 | OCR1BL=0x00; |
114 | |
115 | // Timer/Counter 2 initialization
|
116 | // Clock source: System Clock
|
117 | // Clock value: Timer2 Stopped
|
118 | // Mode: Normal top=0xFF
|
119 | // OC2 output: Disconnected
|
120 | ASSR=0x00; |
121 | TCCR2=0x00; |
122 | TCNT2=0x00; |
123 | OCR2=0x00; |
124 | |
125 | // Timer/Counter 3 initialization
|
126 | // Clock value: Timer3 Stopped
|
127 | // Mode: Normal top=0xFFFF
|
128 | // OC3A output: Discon.
|
129 | // OC3B output: Discon.
|
130 | // Noise Canceler: Off
|
131 | // Input Capture on Falling Edge
|
132 | // Timer3 Overflow Interrupt: Off
|
133 | // Input Capture Interrupt: Off
|
134 | // Compare A Match Interrupt: Off
|
135 | // Compare B Match Interrupt: Off
|
136 | TCCR3A=0x00; |
137 | TCCR3B=0x00; |
138 | TCNT3H=0x00; |
139 | TCNT3L=0x00; |
140 | ICR3H=0x00; |
141 | ICR3L=0x00; |
142 | OCR3AH=0x00; |
143 | OCR3AL=0x00; |
144 | OCR3BH=0x00; |
145 | OCR3BL=0x00; |
146 | |
147 | // External Interrupt(s) initialization
|
148 | // INT0: Off
|
149 | // INT1: Off
|
150 | // INT2: Off
|
151 | // Interrupt on any change on pins PCINT0-7: Off
|
152 | // Interrupt on any change on pins PCINT8-15: Off
|
153 | MCUCR=0x00; |
154 | EMCUCR=0x00; |
155 | |
156 | // Timer(s)/Counter(s) Interrupt(s) initialization
|
157 | TIMSK=0x80; |
158 | |
159 | ETIMSK=0x00; |
160 | |
161 | // USART0 initialization
|
162 | // Communication Parameters: 8 Data, 1 Stop, No Parity
|
163 | // USART0 Receiver: On
|
164 | // USART0 Transmitter: On
|
165 | // USART0 Mode: Asynchronous
|
166 | // USART0 Baud Rate: 9600
|
167 | UCSR0A=0x00; |
168 | UCSR0B=0x98; |
169 | UCSR0C=0x86; |
170 | UBRR0H=0x00; |
171 | UBRR0L=0x5F; |
172 | |
173 | // USART1 initialization
|
174 | // Communication Parameters: 8 Data, 1 Stop, No Parity
|
175 | // USART1 Receiver: On
|
176 | // USART1 Transmitter: On
|
177 | // USART1 Mode: Asynchronous
|
178 | // USART1 Baud Rate: 115200
|
179 | UCSR1A=0x00; |
180 | UCSR1B=0x18; //UCSR1B=0x98; |
181 | UCSR1C=0x86; |
182 | UBRR1H=0x00; |
183 | UBRR1L=0x07; |
184 | |
185 | // Analog Comparator initialization
|
186 | // Analog Comparator: Off
|
187 | // Analog Comparator Input Capture by Timer/Counter 1: Off
|
188 | ACSR=0x80; |
189 | |
190 | // SPI initialization
|
191 | // SPI disabled
|
192 | SPCR=0x00; |
193 | |
194 | // I2C Bus initialization
|
195 | // I2C Port: PORTD
|
196 | // I2C SDA bit: 7
|
197 | // I2C SCL bit: 6
|
198 | // Bit Rate: 100 kHz
|
199 | // Note: I2C settings are specified in the
|
200 | // Project|Configure|C Compiler|Libraries|I2C menu.
|
201 | i2c_init(); |
202 | |
203 | // Global enable interrupts
|
204 | #asm("sei")
|
205 | value_a=0; |
206 | value_b=0; |
207 | while (1) |
208 | {
|
209 | |
210 | |
211 | for(value_a=0;value_a!=size;value_a++) |
212 | {
|
213 | PORTA=drehen(offset_a+value_a); |
214 | PORTC=drehen(offset_b+value_b); |
215 | delay_us(300); |
216 | }
|
217 | |
218 | for(value_b=0;value_b!=size;value_b++) |
219 | {
|
220 | PORTA=drehen(offset_a+value_a); |
221 | PORTC=drehen(offset_b+value_b); |
222 | delay_us(300); |
223 | }
|
224 | |
225 | for(value_a=size;value_a!=0;value_a--) |
226 | {
|
227 | PORTA=drehen(offset_a+value_a); |
228 | PORTC=drehen(offset_b+value_b); |
229 | delay_us(300); |
230 | }
|
231 | |
232 | for(value_b=size;value_b!=0;value_b--) |
233 | {
|
234 | PORTA=drehen(offset_a+value_a); |
235 | PORTC=drehen(offset_b+value_b); |
236 | delay_us(300); |
237 | }
|
238 | |
239 | size=20; |
240 | |
241 | offset_a=offset_a+calc_a; |
242 | if (offset_a>20) calc_a=-1; |
243 | if (offset_a<1 ) calc_a=1; |
244 | |
245 | offset_b=offset_b+calc_b; |
246 | if (offset_b>20) calc_b=-1; |
247 | if (offset_b<1 ) calc_b=1; |
248 | |
249 | }
|
250 | }
|
251 | |
252 | //Zum Byte verdrehen
|
253 | unsigned char drehen(unsigned char value) |
254 | {
|
255 | unsigned char erg; |
256 | unsigned char i; |
257 | if (value&0x01) erg=erg+0x80; |
258 | if (value&0x02) erg=erg+0x40; |
259 | if (value&0x04) erg=erg+0x20; |
260 | if (value&0x08) erg=erg+0x10; |
261 | |
262 | if (value&0x10) erg=erg+0x08; |
263 | if (value&0x20) erg=erg+0x04; |
264 | if (value&0x40) erg=erg+0x02; |
265 | if (value&0x80) erg=erg+0x01; |
266 | return (erg); |
267 | }
|
268 | |
269 | void uart1en(unsigned char value) |
270 | {
|
271 | if (value==1) |
272 | {UCSR1B=UCSR1B|0x80;} |
273 | else
|
274 | {UCSR1B=UCSR1B&0x7F;} |
275 | }
|
Komisch ist wenn ich einen Reset mache, über den Pin, dann läuft er so wie er soll aber sobald der Strom weg war dann geht es nicht mehr...
Hi >Komisch ist wenn ich einen Reset mache, über den Pin, dann läuft er so >wie er soll aber sobald der Strom weg war dann geht es nicht mehr... Fuses: -Brown-Out eingeschaltet? -Start-Delay auf Maximum? MfG Spess
Ich vermisse im Schaltbild: - Schaltung am Reset-Pin (Pullup?) - Pullups an SCL und SDA
Die UART Verbindungen sind systematisch vertauscht: R1OUT (Ausgang) => TxD0 (Ausgang) T1IN (Eingang) => RXD0 (Eingang) T2IN (Eingang) => RXD1 (Eingang)
Frank M. schrieb: > - Schaltung am Reset-Pin (Pullup?) Hat der Controller selbst an Bord. Ein 10-100nF Kondensator könnte aber nicht schaden.
A. K. schrieb: > Frank M. schrieb: > >> - Schaltung am Reset-Pin (Pullup?) > > Hat der Controller selbst an Bord. Ein 10-100nF Kondensator könnte aber > nicht schaden. Gilt das für alle ATmegas/ATtinys? Wenn ja, wundere ich mich, warum man die Pullups am Reset-Pin überall sieht, z.B. hier: http://www.mikrocontroller.net/articles/AVR-Tutorial:_Equipment#Selbstbau Edit: Aus "Atmel AVR042: AVR Hardware Design Considerations": "The reset line has an internal pull-up resistor, but if the environment is noisy it can be insufficient and reset can therefore occur sporadically. Refer to datasheet for value of pull-up resistor on specific devices." Quelle: http://www.atmel.com/Images/doc2521.pdf
Frank M. schrieb: > Gilt das für alle ATmegas/ATtinys? Ich denke schon. > Wenn ja, wundere ich mich, warum man > die Pullups am Reset-Pin überall sieht, z.B. hier: Mit 30-60K ist er recht hochohmig. Bei den AT90Sxxxx sogar 100-500K.
Habs gefunden!
// USART0 Receiver interrupt service routine
interrupt [USART0_RXC] void usart0_rx_isr(void)
{
char status,data;
status=UCSR0A;
}
// USART1 Receiver interrupt service routine
interrupt [USART1_RXC] void usart1_rx_isr(void)
{
char status,data;
status=UCSR1A;
}
Ich lesen das UDR0 und UDR1 nicht aus, somit bleibt es im buffer und der
Atmel hängt sich auf.. Nun geht alles.
Frank M. schrieb: > Gilt das für alle ATmegas/ATtinys? Wenn ja, wundere ich mich, warum man > die Pullups am Reset-Pin überall sieht, z.B. hier: Der Reset-Eingang braucht nur wenige ns kurze Störpulse, um einen Reset auszulösen. Insbesondere, wenn da noch ein Programmierkabel dran hängt. Daher ist eine RC-Beschaltung (10k, 100nF) üblich, um ein unerwünschtes Reset zu verhindern. Wenn man aber nicht in der Schaltung programmieren muß, kann man ihn auch direkt an VCC legen. Dann ist er ja niederohmig abgeschlossen und kann keine Störungen einfangen. Peter
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.