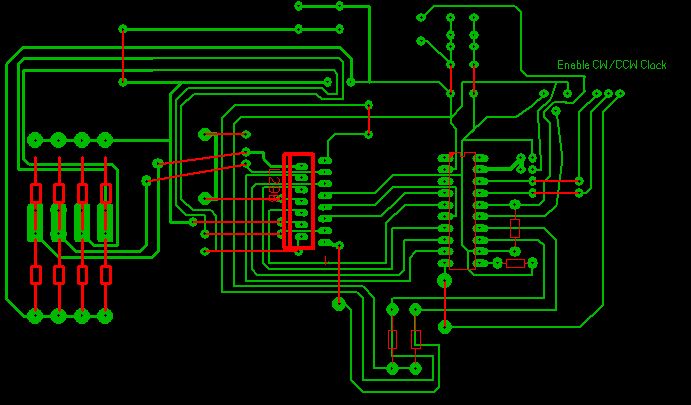
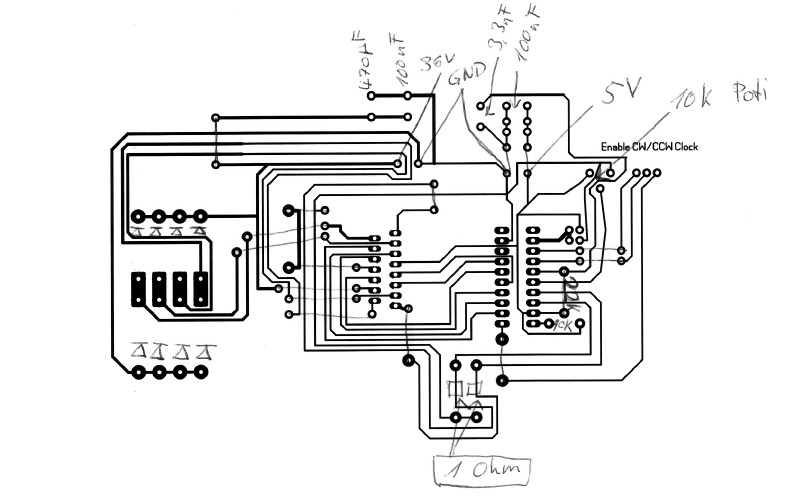
Hallo liebe Leute Ich bin nun schon seit einiger Zeit daran ne Platine zur Schrittmotorsteuerung zu entwerfen, und es klappt leider einfach nicht. Deshalb würde ich euch bitten mal über meine Platine rüberzuschauen und zu sagen ob ihr da offensichtliche Fehler findet. Auf den angehängten Bildern sind Brücken Rot bzw. gelb markiert. Die werte musste ich leider von Hand reinschreiben, sind aber von der Roboternetzseite übernommen. http://www.rn-wissen.de/index.php/Schrittmotoren Hoffe ihr könnt mir helfen:) Liebe Grüsse
:
Verschoben durch Admin
Angehängte Dateien:
-

step.GIF
7,6 KB
{kind=link}
{kind=link}
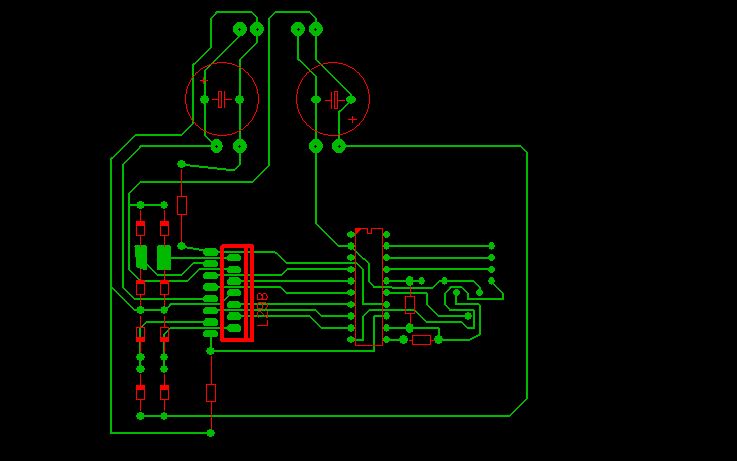
Hi Leute ich konnts nicht lassen und habe jetzt anhand der Platinen im anderen Thread noch einmal eine Platine entworfen. Sie ist nicht schön, aber ich wüsste einfach gerne ob sie im Prinzip korrekt ist, also wenn einer von euch sie nochmals kurz anschauen könnte:) Liebe Grüsse!
Bitte! sagt mir doch was falsch ist! Ich seh ja ein, dass die Platine nicht wirklich gut designed ist, aber es nimmt mich wunder ob sie im Prinzip in Ordnung wäre bzw. funktionieren würde. Liebe Grüsse (bitte nicht den obigen Text so interpretieren, dass er in unangemessenem Ton verfasst wäre;))
gabber_gandalf schrieb: > Ich seh ja ein, dass die Platine nicht wirklich gut designed ist, aber > es nimmt mich wunder ob sie im Prinzip in Ordnung wäre bzw. > funktionieren würde. Wenn du da mit dem Ohmmeter nachmisst, sind sicher überall Verbindungen. Aber mit dem Messgerät ist der Prüfstrom 1. Gleichstrom und 2. nur ein paar uA. > Bitte! sagt mir doch was falsch ist! Was falsch ist, ist einfach zu sagen: 1. ungünstige Leitungsführung (Stichworte: Versorgung, Masse, Ströme) 2. untaugliche Leitungsquerschnitte/Leiterbahnbreiten 3. keine Entkopplung am L297 (100nF direkt an Pins 2+12) 4. keine Entkopplung am L298 (Kondensatoren wirkungslos wegen 1.) Warum es falsch ist, das kannst du dir mal überlegen... Als Tipp: schau mal nach und versuch zu verstehen, wie ANDERE das gemacht haben. AppNotes und Layoutvorschläge vom Hersteller sind da immer ein guter Startpunkt. Denn du hast Glück und bist nicht der Erste, der so eine Endstufe bastelt. gabber_gandalf schrieb: > Die werte musste ich leider von Hand reinschreiben, sind aber von der > Roboternetzseite übernommen. Da sind noch ein paar 100nF Kondensatoren mit eingezeichnet, die dienen der angesprochenen Entkopplung... Kurz: du darfst von einer Schaltung nicht nur das übernehmen, was du verstehst. Sondern du mußt versuchen, das zu verstehen, was in der Schaltung ist...
Vielen Dank für deine ausführliche Antwort! Ich werde das Design nochmals anpassen und hoffen das es sich einer von euch nochmals zur Brust nimmt;) Denn nur so kann man im Endeffekt auch was lernen. Liebe Grüsse
Mir ist völlig unklar, was die beiden dicken Cs sollen bzw. warum deren Gnds nicht verbunden sind. Warum gehen nur 4 Dioden auf den rechten? Auf jeden Fall sind die beiden Dioden links unten falsch rum drin. Statt der Dioden kannst Du einen L6510 verwenden, gibts bei Reichelt. Die Platine ist fast nicht einseitig machbar, wenn man es richtig machen will. Mein Vorschlag: die Powerleitungen auf der Platine machen, die Steuerleitungen zwischen 297 und 298 fädeln (CuL / Fädeldraht). ICs so anordnen, dass die Leitungen kurz sind. Die Powerleitungen so gerade, dick und kurz machen wie möglich. Jeder Knick stellt eine Spule mit einer 8tel Windung dar (parasitäre Induktivität). Die Sense-Rs müssen lo-inductive sein, also keine gewendelten Drahtwiderstände. Steht alles im Datenblatt. Aber beachten: der L298 ist 25 Jahre alt, da gibt es inzwischen deutlich besseres, das ohne Kühlkörper auskommt. Die Platine im Robo-Netz ist käuflich erwerbbar, Du sparst Dir eine Menge Ärger.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.