Hallo, ich suche einen Beschleunigungssensor, der über die Erdbeschleunigung den aktuellen Neigungswinkel messen kann. Jetzt ist mein Problem einen zu finden der über meinen gesamten Messbereich eine Auflösung bietet welche Groß genug ist um so 5° Winkelunterschied zu erkenne. Ich hab hier schon einen (ADXL330), aber mit dem ist das eher nicht möglich, ich hab mir ausgerechnet bei einem Atmega mir 10Bit ADC und der Empfindlichkeit des Sensors von 300mV/g kommt man im Bestenfall auf eine Auflösung von ca. 16mg/Bit. Um auch im ungünstigsten Fall (oberer und unterer Totpunkt) 5° zu unterscheiden brauche ich mindestens eine Auflösung von 4mg/Bit. Hat hier schon jemand Erfahrung mit entsprechenden Sensoren die so eine Auflösung bieten können? Anscheinend sollen die von ST ja am besten sein aber ist solch eine Auflösung von z.B. 1mg beim LIS331 auch realistisch (bei einem Messbereich von +-4g)? Also am Besten wäre für mich ein kleines Board mit einem SMD-Sensor der einen Messbereich von vlt. +-3g (gravitation + auftretende Zentripedalbeschl.) hat und eine ausreichend gute Genauigkeit hat um Winkel von mindestens 5° zu erkennen. Ist jetz mal ein bisschen viel für den Anfang aber ich hoffe es gibt ein paar die sich der Herausforderung stellen :) Grüße Bernhard
Wie groß darf denn Dein Meßgerät werden? Wie oft willst Du messen? Für allerlei Fluggerät gibt es bestimmt fertige Sachen.. Ansonsten - eine Flüssigkeit?
ja im Endeffekt sollte es am Besten ein kleiner SMD Sensor sein den wir auf eine eigene Platine verbauen, aber zum Entwickeln brauchen wir eine Platine mit "normalen" Anschlüssen (Stiftleiste oder so...) aja und die Messfrequenz sollte so ca. 1kHz sein.
Was für ein Totpunkt? Ein Sensor reicht nicht! Bei Drehung um eine parallel zur Erdoberfläche liegende Achse werden 2, sonst 3 Sensoren benötigt! Gruß Jobst
Nein unser Sensor soll auf einer Scheibe montiert sein welche vertikal montiert wird (Drehachse liegt Horizontal). Ein sich dort befindlicher Beschleunigungssensor wird uns dementsprechen Sinusförmige Werte Liefern: oben und unten 1 bzw. -1 und an den Seiten 0 oben und unten falchen die Unterschiede zwischen jeweils 5° aber entsprechend der Sinuskurve ab, das muss beachtet werden. Alles in allem soll ein üblicher MEMS-Beschleunigungssensor verwendet werden, ich bin mir eben aber noch unsicher welche für mich passend sind? Gruß Bernhard
@ jobst ok ich seh grad wir haben eh das selbe gemeint, aber das sollte doch mit einem Sensor auch möglich sein oder?
Tach Bernhard, sehe ich das richtig, dass du ein Lagesensor in einem beschleunigten System bauen willst? Das wird mit einem Linearbeschleunigungssensor nicht gehen. Das funktioniert nur in ruhenden Systemen. Um das zu realisieren brauchst du Drehratensensoren alias Gyros. Wenn es dir um eine Lageerkennung in einem unbeschleunigten System geht, kannst du mit einer maximalen Beschleunigung auf einer Achse mit 1g rechnen. Erdbeschleunigung halt. Bei 10bit hast du eine Auflösung besser als 1mg. Was das Rauschen angeht: Es kommt stark auf die sample rate an. Das Stichwort ist oversampling. Im Tausch gegen Abtastrate gewinnst du Auflösung und reduzierst das Rauschen. Du musst halt nur viel Zeit habe, denn für 4xoversampling erhälst du ein bit Auflösung. Thor
Bernhard schrieb: > Nein unser Sensor soll auf einer Scheibe montiert sein welche vertikal > montiert wird (Drehachse liegt Horizontal). Ein sich dort befindlicher > Beschleunigungssensor wird uns dementsprechen Sinusförmige Werte > Liefern: oben und unten 1 bzw. -1 und an den Seiten 0 > oben und unten falchen die Unterschiede zwischen jeweils 5° aber > entsprechend der Sinuskurve ab, das muss beachtet werden. Und wie willst du da jetzt die Zentripetalbeschleunigung rausrechnen? Oder machst du das rechnerisch über die bekannte Drehzahl?
Ja Hallo, Eigentlich geht es um ein unbeschleunigtes System (außer der Gravitation), da bei der Drehbewegung die Zentripedalbeschleunigung porportional zur Drehzahl ist kann ich diese Herausrechnen und erhalte somit nur mehr die Gravitation, aber dafür brauche ich eben einen Sensor der einen höheren Messbereich (ca. 3g) hat als die Meisten (nur ca. 1.5g). Gruß
Bernhard schrieb: > Ja Hallo, > > Eigentlich geht es um ein unbeschleunigtes System (außer der > Gravitation), da bei der Drehbewegung die Zentripedalbeschleunigung > porportional zur Drehzahl ist kann ich diese Herausrechnen das du dich da mal nicht täuscht. Damit du die rausrechnen kannst, musst du für jeden Messpunkt den zu diesem Zeitpunkt vorliegenden Rotationswinkel kennen. Genau den willst du aber bestimmen. Zentripetalkraft ist ein (bei dir) 2D Vektor Graviation ist (bei dir) ein 2D Vektor Was du misst ist die Resultierende aus der Vektoraddition der beiden (genauer misst du den Betrag der Resultierenden projeziert auf den Radiusvektor), weil du ja nur einen 1D Sensor hast). Um die in die erzeugenden Teilvektoren zu zerlegen, genügt dir der Betrag aber nicht. Du musst mindestens noch die Richtung kennen. Die kannst du aber mit einem 1D Sensor nicht feststellen.
Mal ganz davon abgesehen ob das Vorhaben nun geht oder nicht, ein Beschleunigungssensor mit 2/4/8g sowie 14 Bit wäre ein MMA8451Q. Ich verwende ihn und bin recht zufrieden. Kostet auch nur 1€
Karl Heinz Buchegger schrieb: > Damit du die rausrechnen kannst, musst du für jeden Messpunkt den zu > diesem Zeitpunkt vorliegenden Rotationswinkel kennen. Genau den willst > du aber bestimmen. Stimmt so nicht, ich Rechne aus der Gesamtbeschleunigung welche mir der Sensor liefert nicht die Gravitationsbeschleunigung heraus sondern die Zentripedalbeschleunigung: Ages = Aerd *sin(alpha) + Azentripedal "alpha" will ich wissen Azentripedla = 2*Pi*n/60 * Radius => wenn ich nun Drehzahl und Radius kenne kann ich die Zentripedal beschleunigung berechnen: Aerd = Ages - Azentripedal und daraus kann ich nun den Winkel berechnen Ich hoff da entdeckt jetzt keiner einen Fehler :) Aber jetzt brauch ich eben noch einen Beschleunigungssensor PS: Der Sensor wird so montiert dass die Messachse durch den Drehpunkt geht
Bernhard schrieb: > aber das sollte doch mit > einem Sensor auch möglich sein oder? Ist Dir die Genauigkeit nur an den beiden Totpunkten wichtig? -> Sensor um 90° drehen Ist Dir die Genauigkeit überall wichtig -> 2. Sensor um 90° gedreht dazu. Alex S. schrieb: > Bei 10bit hast du eine Auflösung besser als 1mg. Nein. Nur wenn der Sensor nur positive Werte liefert und einen Vollausschlag bei 1G hat. Wenn Du den Sensor zentriert anbringst, hast Du auch keine Fliehkräfte. Wenn Du den Sensor nicht zentriert anbringst, darfst Du nicht nur die Fliehkräfte herausrechnen, sondern auch die Drehbeschleunigung. D.h. bei variabler Drehzahl hast Du kaum eine Chance. Sensoren gibt es von AD bis (mindestens) 50G Gruß Jobst
Bernhard schrieb: > Karl Heinz Buchegger schrieb: >> Damit du die rausrechnen kannst, musst du für jeden Messpunkt den zu >> diesem Zeitpunkt vorliegenden Rotationswinkel kennen. Genau den willst >> du aber bestimmen. > > Stimmt so nicht, ich Rechne aus der Gesamtbeschleunigung welche mir der > Sensor liefert nicht die Gravitationsbeschleunigung heraus sondern die > Zentripedalbeschleunigung: > > Ages = Aerd *sin(alpha) + Azentripedal > > "alpha" will ich wissen Du kannst aber nicht links vom Totpunkt von rechts vom Totpunkt unterscheiden. Wenn dir das egal ist, ok
@ Timmo H. Also der Sensor kling ganz gut, mit 800Hz sollte ich leben können, er hat anscheinen bei +-4g Messbereich noch eine Auflösung von 2048 Werte por g was wirklich gut kling, aber sind diese Werte auch realistisch oder verliert man die letzen Bits wegen dem Rauschen? Und noch etwas: Gibt es den Sensor vlt. schon fertig auf einer Platine? Gruß
Angehängte Dateien:
-

l_tarbeit.jpg
110 KB -

sensor_board.jpg
100 KB
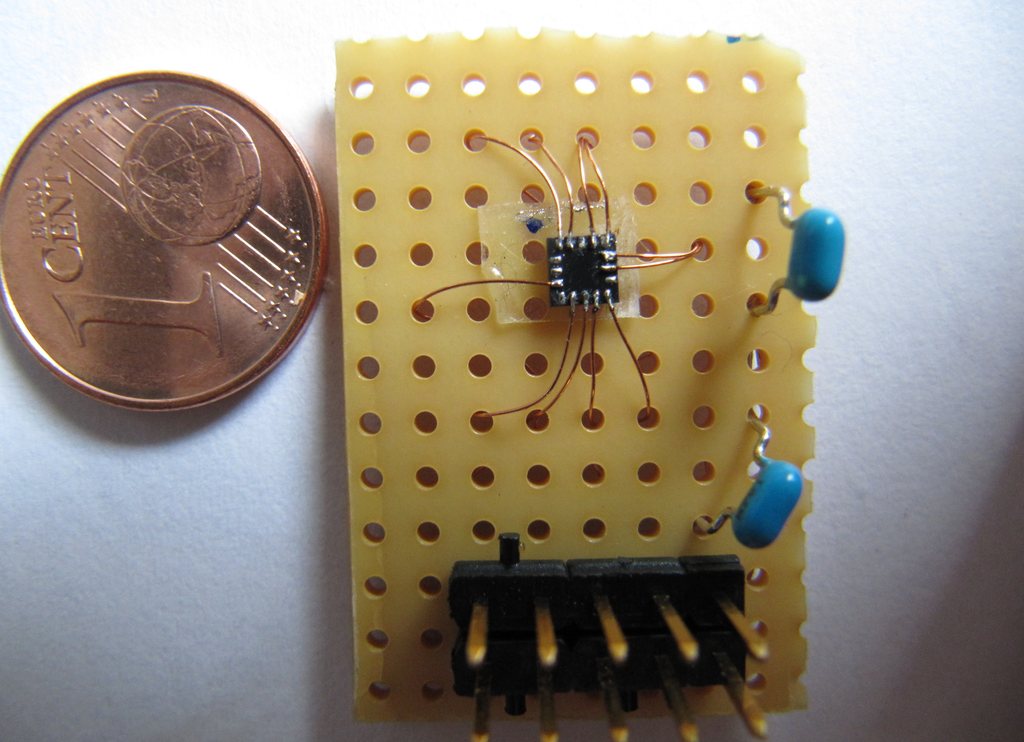
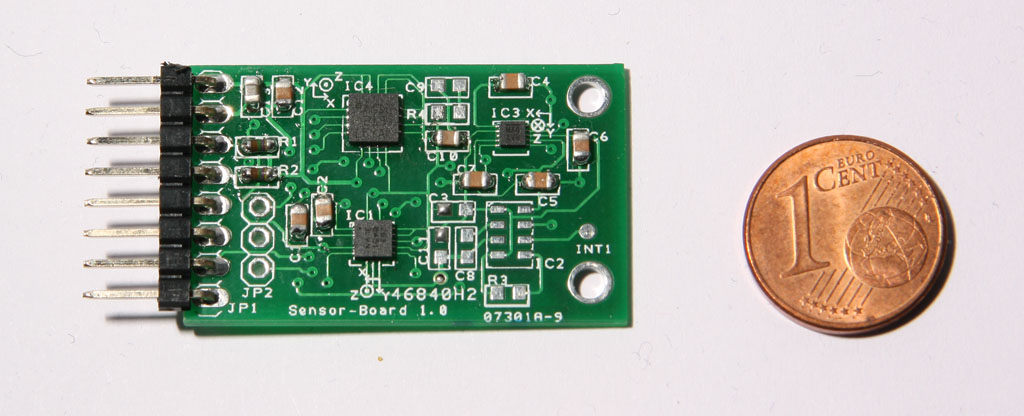
Bernhard schrieb: > @ Timmo H. > > Also der Sensor kling ganz gut, mit 800Hz sollte ich leben können, er > hat anscheinen bei +-4g Messbereich noch eine Auflösung von 2048 Werte > por g was wirklich gut kling, aber sind diese Werte auch realistisch > oder verliert man die letzen Bits wegen dem Rauschen? > Und noch etwas: Gibt es den Sensor vlt. schon fertig auf einer Platine? > > Gruß Bei 800 Hz rauscht er natürlich mehr als bei 100Hz. Mit dem eingebauten Oversampling und LowNoise aktiv ist er schon recht sauber. Absolut ruhig bekommt man ihn natürlich nicht, aber das betrifft ja alle Sensoren. Ich habe mir mal einen Deadbug gelötet (Bild 1 ) und später dann eine Platine dafür entwickelt (Bild 2). Da kommt dann auch ein Gyro, Magnetsensor und Luftdrucksensor mit rauf. Kann dir gerne eine verkaufen, nur habe ich momentan die Sensoren nicht auf Lager. Wobei einen habe ich noch liegen, aber nur die 12-Bit Variante.
@Timmo H. Ja das muss ich noch abklären aber ich denke, wenn das geht wäre das auf jeden Fall interessant. Für uns wären 2 am Besten, aber die hast du nicht oder? Wieviel würde das denn kosten inkl. Versand nach Tirol/Österreich wenns geht? Danke Bernhard
Ich würde dir ja gerne 2 bestückte Platinen verkaufen, jedoch sind sowohl der MMA8451Q sowie der MMA8452Q nirgends lieferbar. Da sind wohl irgendwelche Handy/Tablet Hersteller erstmal auf Prio. Wie gesagt, eine Platine mit dem 8452Q könnte ich dir verkaufen, weil ich den noch hier habe. Könnte sie dir für 10€ + 1,45€ Versand. Ansonsten heißt es warten bis wieder verfügbar. Oder du kaufst dir halt das offizielle Modul "TWRPI-MMA845XQ"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.