Hallo zusammen Für ein Schulprojekt meines Cousins muss ich einen Motor (Graupner Speed 600 Race 8.4 V) regeln können (mit einem Potentiometer die gewünschte Leistung von 0 - 100% einstellen). Dazu habe ich einen Fahrtregler von Conrad (http://www.conrad.ch/ce/de/product/207369/CARBON-SERIES-FAHRTREGLER-MICROCAR/SHOP_AREA_32305&promotionareaSearchDetail=005) per PWM angesteuert. Das PWM-Signal hat einen Pegel von 5 V und beim Einschalten des Fahrtreglers einen Dutycycle von ca. 50%. Es wird von einem LPCxpresso 1114 generiert und mit einem OP auf 5 V angehoben. Wenn ich den Regler dann einschalte, kommt das erste Piepsen vom Motor, dann sollte er laut Anleitung etwa 2 Sekunden blinken, und dann müsste der Motor abermals Geräusche von sich geben. Jedoch blinkt bei mir der Regler die ganze Zeit nach dem ersten Piepston und scheint seine Mittelstellungskalibrierung nicht erfolgreich durchführen zu können. Hat hier jemand einen Tipp oder Erfahrungen diesbezüglich, denn ich bin mit meinem Latein total am Ende und so langsam stehe ich auch etwas unter Zeitdruck. Meiner Meinung nach dürfte das auch gar nicht so schwierig sein, also ist es wohl irgend eine Kleinigkeit die ich übersehen habe.
> Das PWM-Signal hat einen Pegel von 5 V und beim > Einschalten des Fahrtreglers einen Dutycycle von ca. 50%. 50% ist schon ein wenig heftig und letzten Endes nichtssagend. Ein Fahrtregler wird wie ein Servo angesteuert. D.h. Du brauchst Pulse von 1 bis 2ms, mit einer Pause nach jedem Puls von cirka 10 bis 20ms. Die Pausenzeiten sind nicht kritisch, aber die Pulszeiten müssen stimmen. Da hilft dir auch nichts, dass du den Regler kalibrieren kannst. Im Bereich 1 bis 2ms wirst du dich bewegen müssen. Ein wenig kleiner bzw. größer wird auch noch ok sein. Aber alles darüber hinausgehende wird vom Regler als Fehlimpuls gewertet werden und er verweigert die Zusammenarbeit.
Tach Maede, dir ist aber klar, dass das Steuersignal kein echtes PWM sondern PPM ist? Der Unterschied ist, dass du beim PPM nur 1ms-2ms high Pegel überträgst und dann eine 20ms Pause kommt. Du wirst etwas mehr Informationen liefern müssen, wenn man dir helfen soll. Thor
Maede schrieb: > Dazu habe ich einen Fahrtregler von Conrad > (http://www.conrad.ch/ce/de/product/207369/CARBON-S...) > per PWM angesteuert. Das PWM-Signal hat einen Pegel von 5 V und beim > Einschalten des Fahrtreglers einen Dutycycle von ca. 50%. Diese Motorsteller müssen angesteuert werden wie Servos. Wie das geht, dazu findest du hier im Forum genug Infos.
Erstmal danke für die Inputs. Die Frequenz ist mit 1 kHz angegeben, das hat mein Signal auch. Ich dachte, PPM ist nur für die Kommunikation zwischen Sender und Empfänger im Modellbaubereich eingesetzt, nicht aber für die Steuerung der Regler etc. Da bin ich also wie es scheint von falschen Tatsachen ausgegangen. Denn in der Beschreibung des Reglers steht nur die Frequenz, aber nichts zum effektiven Signal. Infos dazu habe ich nur hier gefunden: http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1263243357. Hier wird geschrieben, dass es nur mit PWM funktionieren würde, und scheinbar war das dann auch erfolgreich. Ich dachte, ich muss auf 50%, damit der Motor dann vorwärts und rückwärts drehen kann. @ Karl Heinz und Alex: Das mit den Pulsen von 1 - 2 ms ist mir noch nicht ganz klar. Denn es wird ja eine Frequenz für das Signal angegeben, und bei 1 kHz passen da ja nicht wirklich ca. 20 ms lange Perioden rein. Sorry für meine möglicherweise etwas blöden Fragen, ich hatte bis jetzt noch nie mit Technik aus dem RC-Modellbau zu tun. ;-)
Maede schrieb: > Erstmal danke für die Inputs. > > Die Frequenz ist mit 1 kHz angegeben, das hat mein Signal auch. Das ist die Frequenz, die hinten rauskommt und auf den Motor geht. Für den Eingang ist es vollkommen falsch. Deshalb macht dein Regler auch nix. Er wartet auf einen gültigen Impuls. > Erstmal danke für die Inputs. > Ich dachte, PPM ist nur für die Kommunikation zwischen Sender und > Empfänger im Modellbaubereich eingesetzt, nicht aber für die Steuerung > der Regler etc. Ist auch so. > Ich dachte, ich muss auf 50%, damit der Motor dann vorwärts und > rückwärts drehen kann. Ja, aber 50% heißt nicht 50% duty cycle. > @ Karl Heinz und Alex: Das mit den Pulsen von 1 - 2 ms ist mir noch > nicht ganz klar. Denn es wird ja eine Frequenz für das Signal angegeben, > und bei 1 kHz passen da ja nicht wirklich ca. 20 ms lange Perioden rein. Weil es nicht die Frequenz des Eingangssignals ist.
Angehängte Dateien:
-

servopulse.png
2,4 KB
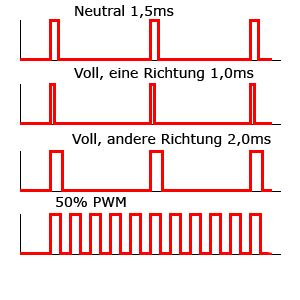
anbei eine Skizze aus der die Zusammenhänge ersichtlich sein sollten: alle 20ms ein puls, 1,5ms neutral, 1,0 und 2,0ms die Vollauschläge. Grüße leo
Ah ok, dann bin ich da von falschen Tatsachen ausgegangen. Ich werde das jetzt mal so versuchen und dann berichten wie es geklappt hat. Vielen Dank für die Informationen!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.