Hallo, ich versuche gerade einen Brushless Motor anzusteuern. Nur leider will der Motor nicht die volle Drehzahl erreichen. Das heißt, er dreht – aber nicht schnell genug. Mir ist bewusst, dass mein derzeitiges Testprogramm mit den delays nicht optimal ist. Ich möchte den Motor nur erst einmal so einfach wie möglich auf die maximale Drehzahl bringen. Ich bin mir auch nicht so sicher ob ich den Motor mit der richtigen Frequenz ansteuer. Als Prozessor nutze ich einen Atmega8. Das ganze soll später mal ein Microkopter werden und ist derzeit noch auf einem Steckbrett aufgebaut. Es wäre nett, wenn jemand mal kurz über das Programm gucken könnte.
Angehängte Dateien:
-

Schaltung.PNG
93 KB
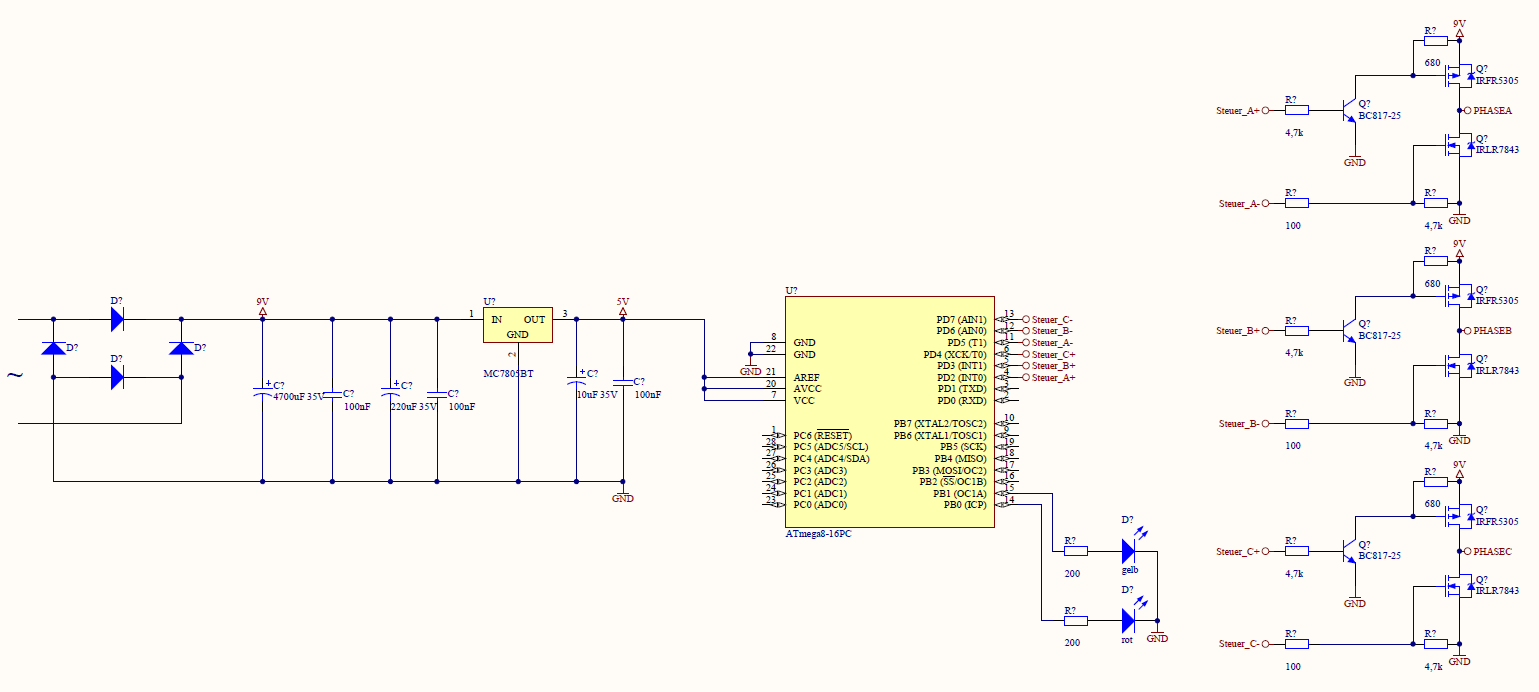
Im Anhang ist die Schaltung wie ich sie auf dem Steckbrett aufgebaut habe. Die ISP hab ich im Schaltplan weggelassen. Bei den Fuses hab ich nur den internen 8MHz Oszillator aktiviert. BODLEVEL ist 2V7. SPIEN und BOOTRST sind gesetzt. Nur so als prinzipielle Frage: Ist es mittels Zwangskommutierung überhaupt möglich an die normale Leistung des Motors heranzukommen? Weil er schon ein bisschen Wind macht. Zum Abheben würde das aber noch nicht reichen...
Hi, "dreht zu langsam" im Sinne von was? Soll heißen, was ist Deine Erwartung und wie sieht die Realität aus. Der Unterschied zwischen elektrischer und mechanischer Drehfrequenz ist Dir bewußt? Polzahl des Motors bekannt? Fragen über Fragen....
Danke erstmal für die Antwort! Also ich nutze einen ROXXY BL-Outrunner 2815 als Motor. Und der sollte ja laut Datenblatt eine maximale Schubkraft von ca 400g haben. Ich habe daher jetzt den Motor an einen kleinen Holzblock mit etwa diesem Gewicht geschraubt und versucht diesen anzuheben. Leider ist an ein Abheben noch lange nicht zu denken. Der Motor macht Wind, aber nicht mehr. Den Unterschied zwischen elektrischer und mechanischer Drehfrequenz meine ich verstanden zu haben. Im vorliegenden Fall wäre mein Motor 14-polig. Das heißt ich bräuchte 7 elektrische Umdreheungen für eine mechanische Umdrehung, was wiederum 42 Kommutierungen für eine mechanische Umdrehung bedeuten würde. Sehe ich das richtig? Meine Hauptfrage ist, was ich tun muss um die drehzahl des Motors auf einfache Weise (also zunächst ohne Spannungsmessung am Motor) zu maximieren. Oder ist das gar nicht möglich? - Ich wollte den Motor eigentlich erst einmal nur auf die maximale Drehzahl beschleunigen, aber ich bin mir halt mit den ganzen Zeiten für die PWM recht unsicher. Ich hab den Code jetzt auch noch einmal mit einem Timer und Anlauframpe umgesetzt (siehe Anhang), aber irgendwas mache ich noch falsch. Die Brushless_Driver.h ist gleich geblieben
schrammler schrieb: > Danke erstmal für die Antwort! > Also ich nutze einen ROXXY BL-Outrunner 2815 als Motor. Und der sollte > ja laut Datenblatt eine maximale Schubkraft von ca 400g haben. Der Motor selbst hat überhaupt keine Schubkraft. Der Schub, der erzielbar ist, hängt nicht ganz unwesentlich von der Qualität der Luftschraube, ihrem Durchmesser und der Steigung ab. Ausserdem erreicht das System seinen höchsten Schub auch nicht bei der höchsten Drehzahl. Wenn du also denkst, deine Drehzahl ist zu niedrig, dann miss sie und vergleiche mit dem Datenblatt, wo du dich befindest. Deine "Messung" ist insofern keine Messung um darüber sagen zu können, dass die Drehzahl nicht erreicht wird.
schrammler schrieb: > Meine Hauptfrage ist, was ich tun muss um die drehzahl des Motors auf > einfache Weise (also zunächst ohne Spannungsmessung am Motor) zu > maximieren. Oder ist das gar nicht möglich? - Ich wollte den Motor > eigentlich erst einmal nur auf die maximale Drehzahl beschleunigen, aber > ich bin mir halt mit den ganzen Zeiten für die PWM recht unsicher. Vergiss das. Es ist nicht möglich mit Zwangskommutierung den Motor mit vollem Schub laufen zu lassen. Das geht nur mit richtiger, elektronischer Kommutierung. Brushless-Controller für Modellbaumotoren
Ok, wenn ich ehrlich bin hab ich der Luftschraube bis jetzt noch nicht so viel Bedeutung zugemessen. Auf meiner jetzigen steht 10x4.5R drauf. Nachdem ich jetzt ein bisschen gelesen habe glaube ich aber das die gehen sollte. Wahrscheinlich ist es wirklich das Beste wenn ich als nächstes die elektr. Kommutierung mit einbaue, da der Motor im Moment auch recht heiß wird. Ich wollte eigentlich nur so einfach wie möglich beginnen und dann immer das nächste mit dazunehmen.
Bei Zwangskommutierung läßt du die Wicklungen des Motors gegeneinander kämpfen. Einmal soll er beschleunigen, im nächsten (falschen) Moment schaltest du wieder um und es wird jetzt gebremst. Das geht nicht! Dre Motor dreht wie er will, der uC horcht aufmerksam und steuert die Wicklungen so an, wie der Motor es will. Die Drehzahl wird über die Spannung (PWM) geregelt.
Nochwas. Hoehere Drehzahlen bedingen auch hoehere Spannungen. Am Besten mal den Motor in die Akkubohrmachine einspannen, antreiben und die Spannung messen.
schrammler schrieb: > Ok, wenn ich ehrlich bin hab ich der Luftschraube bis jetzt noch nicht > so viel Bedeutung zugemessen. Solltet du aber. Darüberhinaus ist es nicht nur vom Propeller, sondern auch von der Geschwindigkeit stark abhängig. Der höchste Schub wird nicht im Stand erreicht, sondern bei einer von Propeller und Drehzahl abängigen Fluggeschwindigkeit. Da du im Stand arbeitest, mußt du also mit weniger Schub rechnen. > Wahrscheinlich ist es wirklich das Beste wenn ich als nächstes die > elektr. Kommutierung mit einbaue, da der Motor im Moment auch recht heiß > wird. Das ist kein Wunder. Du "pumpst" quasi mit Gewalt maximale Leistung in den Motor, und der Teil, den er nicht zum Drehen verbraucht, wird halt verheizt. > Ich wollte eigentlich nur so einfach wie möglich beginnen und dann immer > das nächste mit dazunehmen. Dann kauf dir doch für den Anfang fertige Motorsteller. S.Tronzo schrieb: > Nochwas. Hoehere Drehzahlen bedingen auch hoehere Spannungen. Am Besten > mal den Motor in die Akkubohrmachine einspannen, antreiben und die > Spannung messen. Normalerweise wird für die Motoren die spzeifische Drehzahl in U/min/V angegeben, wobei das die Leerlaufdrehzahl ist. Unter Last wird sich die noch rezudieren.
Ohne deinen Code jetzt gelesen zu haben... du mußt zwingend die Drehzahl über die zurückkommende Elektromotorische Kraft auf der nicht bestromten Phase ermitteln (Komparator) und danach den Schaltzeitpunkt errechnen - alles andere führt nicht zum Ziel. Guck mal bei open-bldc.org.
Du kannst aber auch die phasenstroeme messen und Feld orientiert Regelung machen. Ist im Prinzip ganz einfach.
Ich kann dir auch aus Erfahrung sagen, dass das ein steiniger Weg werden kann, der ein paar Graue Haare kosten kann, bis die elektronische Kommutierung ausreichend gut funktioniert :-)
besserwisser schrieb: > Du kannst aber auch die phasenstroeme messen und Feld orientiert > Regelung machen. Ist im Prinzip ganz einfach. da hat der besserwisser aber vergessen zu sagen, dass er das mit "nur im Prinzip ganz einfach" auch wirklich wörtlich meint. Die Realisierung ist alles andere als trivial. Sensorlos erst recht nicht.
Zugegeben, es wird schon ne Stunde dauern, geeignete Hardware vorausgesetzt. Aber schwer ist anders.
Danke für die vielen Antworten! ;) Ich hab zwar leider die nächsten 2 Tage keine Zeit das alles auszuprobieren, aber werde mich danach hinsetzen und das mit der elektronische Kommutierung angehen. Simon K. schrieb: > Ich kann dir auch aus Erfahrung sagen, dass das ein steiniger Weg werden > > kann, der ein paar Graue Haare kosten kann, bis die elektronische > > Kommutierung ausreichend gut funktioniert :-) Das glaube ich dir gern, zumal ich auch noch lange nicht perfekt im Programmieren bin ... Aber mich hetzt ja keiner und man lernt nur dazu ;)
besserwisser schrieb: > Zugegeben, es wird schon ne Stunde dauern, geeignete Hardware > vorausgesetzt. Aber schwer ist anders. Ich weiss nicht was dein Beitrag hier soll. Hier ist jemand der hat schon Probleme eine Blockkommutierung hinzubekommen. Dem dann vorzumachen eine FOC ist Spielerei halte ich für dreist oder arrogant. Wenn man das komplett selbst Programmieren will gehen da wohl einige Wochen oder Monate drauf, ausreichende Kenntnisse in dem Bereich vorausgesetzt. Irgend eine AppNote zu kopieren kann jeder, da kann man dann aber gleich kaufen. Und wann man durch den Code dieser AppNote nicht durchsteigt sollte man es lieber gleich lassen. Wenn du hier nur deinen langen .... zeigen willst, dann such dir lieber eine andere Spielwiese und versuche nicht den Rest hier dumm zu machen. Oder zeig mal deine selbst entwickelten Projekte. Vielleicht erzittern wir dann alle gemeinsam vor dir.
Danke nochmal an alle für die Antworten. Habe mir jetzt eine Platine erstellt und die elektronische Kommutierung eingebeut - und es geht ;) Jetzt kommt die Steuerplatine ...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.