Guten Aben Zusammen, Seit mittlerweile 3 Wochen versuche ich einen Schrittmotor bezüglisch seines Laufs und Geschwindigkeit zu optimieren ohne nennenswert Erfolg. Für eine Messung mit der Auflösung vom 0,01° ist es sehr wichtig, dass der Schrittmotor während der gesamten Messung seine Geschwindigkeit und Lauf sehr konstant beibehält. Die vorgegebenen Geschwingigkeit soll 7°/Sec sein. Die Messungen zeigen, dass der Schrittmottor zwischen 5°/Sec und 13°/Sec hin und her schwingt. ICh habe - die Regelung Ein / Ausgeschaltet - Riemenantrieb eingesetzt - Verschiedenen Dämdfer eingesetzt (Selicon, Mass...) dennoch sehe ich keine Verbessung. Auch die alternative mit Servomotor ist noch schlimmer. Hat jemand hier schon mal Schrittmotoren in Low Speed bereich eingesetzt und dabei eine sehr konstante Lauf bzw Geschwindigkeit erzielt? Auch für weiteren Vermutzungen und Vorschläge bin ich Ihnen Sehr dankbar MFG Deborah
:
Verschoben durch Moderator
Deborah, such noch mal etwas nach den Unterkapiteln hier im Forum. Bei "Ausbildung & Beruf" bist du nicht ganz richtig, besser wäre wohl "µC & Elektronik". Vielleicht verschiebt ein Moderator den Thread, ich klicke hier nach mal auf den Button "Beitrag melden".
Hi, weitere Informationen zu der Sache währen schon nicht verkehrt... Erste wichtige Information ist für mich z.B. die Steuerung -> Damit meine ICH jetzt NICHT den Leistungsteil sondern die "Taktquelle", also woher bekommt der seine Schrittinformationen. Die zweite Wichtige Information währe für mich die Belastung... ISt die Konstant, ist die nicht konstant und wie ist die überhaupt. (Für einen Minimotor kann schon ein etwas zu groß gewordener Uhrzeiger einen Unterschied bei den Zeiten von 12/0 bis 6 und dann von 6 bis 12 machen) Und dann gibt es durchaus noch zahlreiche weitere Dinge... Aber da wir vermuten sollen: Meine Glaskugel deutet da auf richtung Steuerung... Also das schon die Schrittimpulse nicht sauber kommen. Das kann zum beispiel passieren wenn man mit einem PC Steuert auf dem kein Betriebssystem läuft das einen harten Echtzeitzugriff direkt auf den Parallelport gestattet. (Also quasi JEDES übliche System -von wenigen Spezialfällen abgesehen...) Wenn es z.B. Windows ist und dann noch andere Programme nebenher laufen dann ist es absolut nichts mit Zeitkonstant... Die Schritte passen zwar, ein WErkstück würde bei einer CNC Bearbeitung trotzdem ordentlich werden - nur die Zeit kann variieren... Mit einem USB Port kann man gar nicht zeitkonstant die Schritte übertragen. (Will man über USB soetwas machen muss man die Daten "Roh" zu einer Steuerung übertragen und diese muss dann das Timing selbst übernehmen) ODer wenn man mit einem µC ansteuert und dort das Timing nicht stimmt. -Beispielweise weil sich Interrups in die Quere kommen oder aus anderem Grund die Echtzeitbedingungen nicht erfüllt sind... Gruß Carsten
Sorry für mein versehen.!! Also es währe sehr nett wenn ein Moderator die Verschiebung dürchführen könnte. Es handelt sich um einen Schrittmotor der Firman Nanotec mit eigenen embedded Controller. Der Weg, Speed, Accel., ... werden in die Steuerung geladen, dann legt sie los ohne auf Windows zu warten. Der Schrittmotor wird in microstep betrieben mit 50000 Schritt pro umdrehung. Laut Hersteller hat der Motor einen Moment von 38-180Ncm. Bei unserer Messung wird der Motor nicht belastet. Der motor dreht einen Kunsstoff Objekt, das nicht wiegt und keinen Drehmoment hat. An der Welle hängt meine Encoder die die Strecke trackt. PS :-) Sie sollen nicht nur vermutzen sondern mir einen zugang zu Ihren langjährigen Erfahrungen gewähren :-)
Deborah schrieb: > Sorry für mein versehen.!! > Also es währe sehr nett wenn ein Moderator die Verschiebung dürchführen > könnte. Machen wir doch gern - rund um die Uhr ;-)
Deborah schrieb: > Es handelt sich um einen Schrittmotor der Firman Nanotec mit eigenen > embedded Controller. Der Weg, Speed, Accel., ... werden in die Steuerung > geladen, dann legt sie los ohne auf Windows zu warten. Und welcher? Wieviel Grad pro Schritt springt der bei Vollschrittansteuerung? > > Der Schrittmotor wird in microstep betrieben mit 50000 Schritt pro > umdrehung. Mikroschrittbetrieb muß noch lange nicht bedeuten, dass der Motor gleichmäßig läuft.
Der Motor besitzt 200 Steps: 1,8° bei der Vollschrittansteuerung sind die Ausschläge noch grösser deshalb bin ich auf Microstep umgestigen Troztdem ist keine gleichmässigere Lauf zu erzielen. Die Däpfer verschlimmern das ganze nur noch da der Motor einfach mehr Strom anzieht... Auch die Riementrieb und übersetzungen bringen nicht viel bei
Deborah schrieb: > Der motor dreht einen > Kunsstoff Objekt, das nicht wiegt und keinen Drehmoment hat. Du meinst, wenig Masse hat. Das nur zur Begriffsklärung. Es handelt sich also nicht um einen Schrittmotor, der bewusst mit einer schiefen Masse bestückt worden ist, um Vibrationen zu erzeugen? 5000 Schritte sind ja schon mal eine Menge Holz. > Hat jemand hier schon mal Schrittmotoren in Low Speed bereich eingesetzt > und dabei eine sehr konstante Lauf bzw Geschwindigkeit erzielt? Das steht und fällt mit der Intelligenz der Software. Im professionellen Bereich wird auch der Strom der einzelnen Phasen gemessen und der Steuerung zugeführt. Sie kann daraus die Masse der anzutreibenden Welle ermitteln und sich die Beschleunigungs- und Bremsrampen dynamisch anpassen, ohne das ein schwingfähiges System in Resonanz gerät. Du solltest dich zuerst mit der Physik vertraut machen, die sich dahinter verbirgt.
Deborah schrieb: > Der Motor besitzt 200 Steps: 1,8° Und welcher Motortyp von Nanotec ist das? Ist der auf gleichmäßigen Lauf im Mikroschrittbetrieb optimiert? Deborah schrieb: > Die Messungen zeigen, dass der Schrittmottor zwischen > 5°/Sec und 13°/Sec hin und her schwingt. Und mit welcher Frequenz schwingt die Geschwindigkeit (in Bezug auf die Schrittfrequenz)?
Nicht belastet? Hatte mal recht lange gesucht. Problem war damals - nur eingebaut, belastet lief der Motor gleichmäßig mit Nennstrom. Nicht eingebaut verlor er Schritte, lief nur mit geringerem Strom zuverlässig.
Kein Name schrieb: > Hatte mal recht lange gesucht. Problem war damals - nur eingebaut, > belastet lief der Motor gleichmäßig mit Nennstrom. Nicht eingebaut > verlor er Schritte, lief nur mit geringerem Strom zuverlässig. Das Problem hatte James Watt auch schon, bis er das Schwungrad an die Kurbelwelle seiner Dampfmaschine montiert hat :-). Aber das muss man eben erst erfahren bzw. verstehen.
Hallo, der Motor läuft eben nur mit 4 Schritten / Sec (die wird er ja wohl machen, oder vergisst er da welche?). Wetten dass er gleichmässig laufen würde, wenn du ein Getriebe 100:1 vorsetzt und den Motor mit 400 Schritten/Sec ansteuerst, selbst ohne Mikroschritte? Gruss Reinhard
Reinhard Kern schrieb: > Wetten dass er gleichmässig laufen > würde, wenn du ein Getriebe 100:1 vorsetzt und den Motor mit 400 > Schritten/Sec ansteuerst, selbst ohne Mikroschritte? Auf das/den Backlash bin ich aber mal gespannt...
Weil der Motor unbelastet betrieben wird, hatte ich auch vermuttet, dass die ungleichmässige Lauf gedäpmst wird, wenn man einen last daran hängt. Ist es aber nicht so. Ich hatte vom Hersteller eien CleanDamper (Silicon ...) eingesetzt. Nur die Ober wellen wurden gefiltert. Vom Lauf oder Geschwindigkeitstetigkeit war keine verbesserung. Also hatte ich eine Schwungmasse (2,5Kg) Massenträgheit liegt bei 1532Kgmm2 gedreht und an der Welle montiert. Die Schwingungen wurden eher noch verstärkt. Der Motor verliert keinen Schritt, und die Positionierung ist absolut supper, nur für meine dynamische Messung ist halte die geschwindigkeit nie konstant stetig. Auch der Motorlauf ist sehr Chaotig sodass diese nicht wegberechnet werden kann. Die Regelung habe ich ausgeschaltet. dadurch ist der lauf ruhiger geworden aber mehr kann ich auch nicht am Controller manipulieren
Kein Name schrieb: > Hatte mal recht lange gesucht. Problem war damals - nur eingebaut, > belastet lief der Motor gleichmäßig mit Nennstrom. Nicht eingebaut > verlor er Schritte, lief nur mit geringerem Strom zuverlässig. Das war bestimmt nicht im Mikroschrittbetrieb, oder?
Zorg schrieb: > Auf das/den Backlash bin ich aber mal gespannt... Darum geht es hier wohl nicht, da bei gleichmäßigem Lauf kein Backlash auftritt. Allenfalls muß man prüfen, ob periodische Fehler durch das Getriebe ein Problem sind. Dazu müßte man die tolerierbaren Geschwindigkeitsabweichungen kennen. Deborah schrieb: > ... dabei eine sehr konstante Lauf bzw Geschwindigkeit erzielt?
In welchen zeitlichen Abständen und mit welcher zeitlichen Auflösung wird der Encoder abgefragt? Bei einem Zeitfehler bei der Erfassung von ca. +/- 600µs pro Encoderschritt erhältst Du statt 7°/sec einen Wert von 5°/sec bzw. 13°/sec. Gruß John
Einen wunderschönen pfingstsonntag. Ich verwende einen optischen HR quadraturencoder mit 9000 Strische. Also 360000 Increment / Umdrehung. Die Data Aquisition wird mit einer embadded FPGA Design dürchgeführtr. Ich sample mit genau 100Hz. Und sie ist bis auf Ticks SEHR genau :-) Leider finde ich kaum Literatur, die sich mit Schrittmotorlauf bafassen. die meisten handeln sich um Drehmoment, Drehzahl, (...)
Handelt es sich um einen Tacho, es gibt Schrittmotoren mit vorgesetzem Untersetzungsgetriebe, da sind die Schritte so klein das man sie kaum sieht. Diese Mikroschritte werden ja so gemacht das der Strom 2er Magnetspulen verändert wird, so das der Anker langsam von einer Spule zur nächsten kippt. Hört sich sehr simpel an, aber an genau diesen Stromrampen liegt es meistens. Vielleicht kannst du schon mit einfachen RC Gliedern zu jeder Spule das ganze verbessern dadurch wäre der Stromanstieg an der Spule begrenzt und nach dem Abschalten würde der Kondensator die Spule noch etwas versorgen so das die Nadel etwas gebremst wird wenn die nächste Spule schon anzieht.
Thomas O. schrieb: > Vielleicht kannst du schon mit einfachen RC Gliedern zu jeder Spule das > ganze verbessern dadurch wäre der Stromanstieg an der Spule begrenzt und > nach dem Abschalten würde der Kondensator die Spule noch etwas versorgen > so das die Nadel etwas gebremst wird wenn die nächste Spule schon > anzieht. Das macht jede Spule auf Grund der Induktivität ganz von selbst. Durch Verringerung der Betriebsspannung läßt sich der Effekt verstärken ;-)
ich will nicht abstreiten das jede Spule eine Induktivität hat. Wenn man einen elektr. Motor mit Schwungmasse startet kann man sehr schon sehen wie arg der Strom hochgeht und wenn sich dann die Drehzahl stabilisiert hat der Strom um einiges runtergeht, da spielt die kurzfristige wirkende Induktivität der Motorspule keine Rolle, genauso wenn die Spulen des Schrittmotors in sehr kurzen Abständen angesteuert werden, da sind die Spulen meist vom vorherigen mal noch teils gesättigt. Durch das verringern der Betriebsspannung begrenzt man natürlich auch wieder den Strom deswegen sieht es dann flüssiger aus. Das Drehmoment geht aber auch sehr stark runter. Das RC Glied kann man aber sehr leicht verändern in dem man den Widerstand und/oder den Kondensator tauscht oder ein Poti nimmt. Eine Motorspule kannst du hingegen nicht so einfach mal tauschen.
Thomas O. schrieb: > Durch das verringern der Betriebsspannung begrenzt man natürlich auch > wieder den Strom deswegen sieht es dann flüssiger aus. Das Drehmoment > geht aber auch sehr stark runter. Bei modernen Schrittmotoren wird der Strom nicht durch die Betriebsspannung sondern durch die Stromregelung bestimmt. Das Drehmoment bei niedriger Drehzahl bleibt gleich, solange die Betriebsspannung höher ist, als R*I der Spule.
Also ist die RC-Schaltung nicht so optimal...??.. CD spieler oder Festplatten müssen doch auch in um bereich ihre speed sehr konstant halten ohne zu schwingen. wie werden sie gelöst.
Deborah schrieb: > CD spieler oder Festplatten müssen doch auch in um bereich > ihre speed sehr konstant halten ohne zu schwingen. Warum? Die Daten laufen nach dem Lesen sogar noch mit CPU-Geschwindigkeit durch den Rechner.
Eine solche feine Schrittauflösung ist nicht mit Standard-Stromreglern (Schrittmotorendstufen) zu erreichen. Auch der Stator ist hierfür nicht präzise genug. High Torque Schrittmotoren, präzise Bestromung der Wicklungen durch speziellen Konstandstrom Leistungsverstärker und Abgleich jedes einzelnen Schrittes wird nötig sein, um das sauber hinzubekommen. Daher kann ich nur empfehlen, einen geeignete (sehr gute) Getriebe zu verwenden.
Deborah: Die Drehzahl einer Festplatte kann man alleine schon durch die Frequenz der Ansteuerung sehr konstant halten die Schwungmasse der Platten und des Motors tragen ihr übriges dazu bei. Beim CD-Player ist es nicht anders. An den Außenseiten bewegen sich die Köpfe bzw. der Laserschlitten entsprechend langsamer.
Wolfgang schrieb: > Durch Verringerung der Betriebsspannung läßt sich der Effekt verstärken ;-) Wollte dir nur sagen durch die geringere Betriebsspannung auch der Strom niedriger ausfällt deswegen auch der stärkere Effekt. Eine Stromregelung verändert auch die Spannung an den Spulen das bringt U=R*I einfach mal so mit.
Festplatten verwenden BLDC, die ruckeln viel weniger, haben eben keine präzisen schritte. Ich würde auch ein Getriebe einsetzen, 100:1 sollte das Problem dramatisch verringern.
Deborah schrieb: > CD spieler oder Festplatten müssen doch auch in um bereich > ihre speed sehr konstant halten ohne zu schwingen. Die werden aber zum einen nicht von Schrittmotoren angetrieben und zum zweiten reicht es aus, die Geschwindigkeit zu kennen, mit der die Daten kommen. Die Daten einer CD bringen dafür sogar ihren Takt mit! Gruß Jobst
Festplatten haben eine Drehzahl von 5400/min bis 15000/min und Du brauchst 1,167/min. Das ist etwas schneller als der Sekundenzeiger einer Uhr (schon ein kleiner Unterschied zu einer Festplatte). Normale CD-Player laufen nicht mit einer konstanten Drehzahl, sondern mit einer konstanten Lesegeschwindigkeit. Die Drehzahl liegt zwischen ca. 600/min (innen) und 200/min (außen). Die Geschwindigkeit wird auch nachgeregelt: bevor der Lesepuffer leer ist wird die Geschwindigkeit erhöht, und wenn er voll ist wird sie verringert. Sie schwankt deshalb auch zwischen ca. 1,2 bis 1,4m/s. Um niedrige Drehzahlen konstant zu halten benutzt man auch gerne mal etwas größere Massen: z. B. für 33,33/min (Gesamtgewicht 105kg) http://www.sales.highendpalace.com/422000.jpg Und die Anforderungen im Audiobereich sind nicht so hoch als das was Du benötigst. Gruß John
Thomas O. schrieb: > Eine Stromregelung verändert auch die Spannung an den Spulen das bringt > U=R*I einfach mal so mit. Nein, bei Stromregelung stellt sich die Spannung, abgesehen von "gebremsten" Flanken auf U_Spule = R*I ein. Da der Strom auf einen konstanten Wert wird geregelt wird, ist dann folglich auch die Spannung über der Spule konstant und (im statischen Zustand) unabhängig von der Betriebsspannung.
das ist mir alles völlig klar. Wenn der Widerstand konstant bleibt wird mit einem Konstantstrom auch die Spannung konstant bleiben, aber so statisch wird das nicht ablaufen. Extremes Beispiel LED umso wärmer destto mehr Strom fließt, desto wärmer wird sie wieder... Und bei einem Schrittmotor hat man bei jedem Schritt eine gewisse Dynamik drin, die man für einen ruhigen Lauf, durch die Stromrampen möglichst klein halten will.
Ich möchte mich schonmal für die vielen Hinweise bedanken. Die RC Schaltung und eine Versuch mit der Masse werde ich am Dinstag ausprobieren. Eine getriebe kann ich nicht einsetzten da, diese nicht in unserer Spezifikation ist. Eine Zahnriemen habe ich bereit eingesetzt und werde diese fortführen. Damit kann ich leider (Wegen konstruktive maßnahmen) höchsten eine Übersetung von (Zähnezahl)Z=30:60 bei T=2,5 Zahnabstand realisieren. Somit werden die Schwingung Amplituden nur halbiert. Für die dynamische Messung ist das jedoch keine Option. Plan B wäre, eine Statische Messung wo ich jede Schrittimpulse fahre, warte bis der Rotor sich absolut beruhig dann die Werte abtaste...(das würde jedoch eeeeeewig dauern... :-):-) Bei einer dynamische Messung hätte man einfach mit der bekannten konstanten Lauf bzw Geschwindigkeit die Messpunkt interpoliert um so zu tun als ob die Messung statisch wäre... (...eine lange Geschichte...) Vielen Dank für die Hinweise und für die noch kommen werden :-) MFG Deborah
Thomas O. schrieb: > Wenn der Widerstand konstant bleibt wird mit einem Konstantstrom auch > die Spannung konstant bleiben, aber so statisch wird das nicht ablaufen. > Extremes Beispiel LED umso wärmer destto mehr Strom fließt, desto > wärmer wird sie wieder... Darum ja die Stromregelung, die unabhängig davon für ein konstantes Magnetfeld, i.e. Drehmoment sorgt. Thermisch kann sich der Widerstand der Spule bei üblichen Lacken maximal um einen Faktor 1.75 gegenüber Raumtemperatur ändern, weil es sonst zu heiß wird. Das passiert aber mit einer ganz anderen Zeitkonstanten als dem Schrittabstand, so dass man einfach mit der mittleren Leistung über der Spule rechnen kann.
John Bauer schrieb: > Sie schwankt deshalb auch zwischen ca. 1,2 bis 1,4m/s. Nein, da verwechselst Du etwas. Es gibt CDs mit 1,2m/s und es gibt welche mit 1,4m/s. Letztere haben meist nur ca. 60 Minuten Spieldauer, die anderen 80. Ansonsten ist die Drehzahl einer CD recht stabil. Bei den etwas über 4MBit/s an Daten, die bei einfacher Audiowiedergabe von der CD kommen, reichte auch 'damals' schon ein 16kBit Baustein zur Pufferung. Gruß Jobst
Jobst M. schrieb: > Nein, da verwechselst Du etwas. > Es gibt CDs mit 1,2m/s und es gibt welche mit 1,4m/s. Du hast Recht. Jobst M. schrieb: > Ansonsten ist die Drehzahl einer CD recht stabil. Nicht die Drehzahl sondern die Lesegeschwindigkeit (CLV = constant linear velocity). Gruß John
John Bauer schrieb: > Jobst M. schrieb: >> Ansonsten ist die Drehzahl einer CD recht stabil. > > Nicht die Drehzahl sondern die Lesegeschwindigkeit > (CLV = constant linear velocity). Ich habe nicht konstant geschrieben ;-) Gruß Jobst
High-Torque-Motoren haben oft im Mikroschrittbetrieb einen unrunden Lauf, verwende mal einen älteren Motor. Kannst Du ein aussagekräftiges Video machen? Kannst Du den Phasenstrom oszillographieren? In welcher Gegend bist Du?
Angehängte Dateien:
-

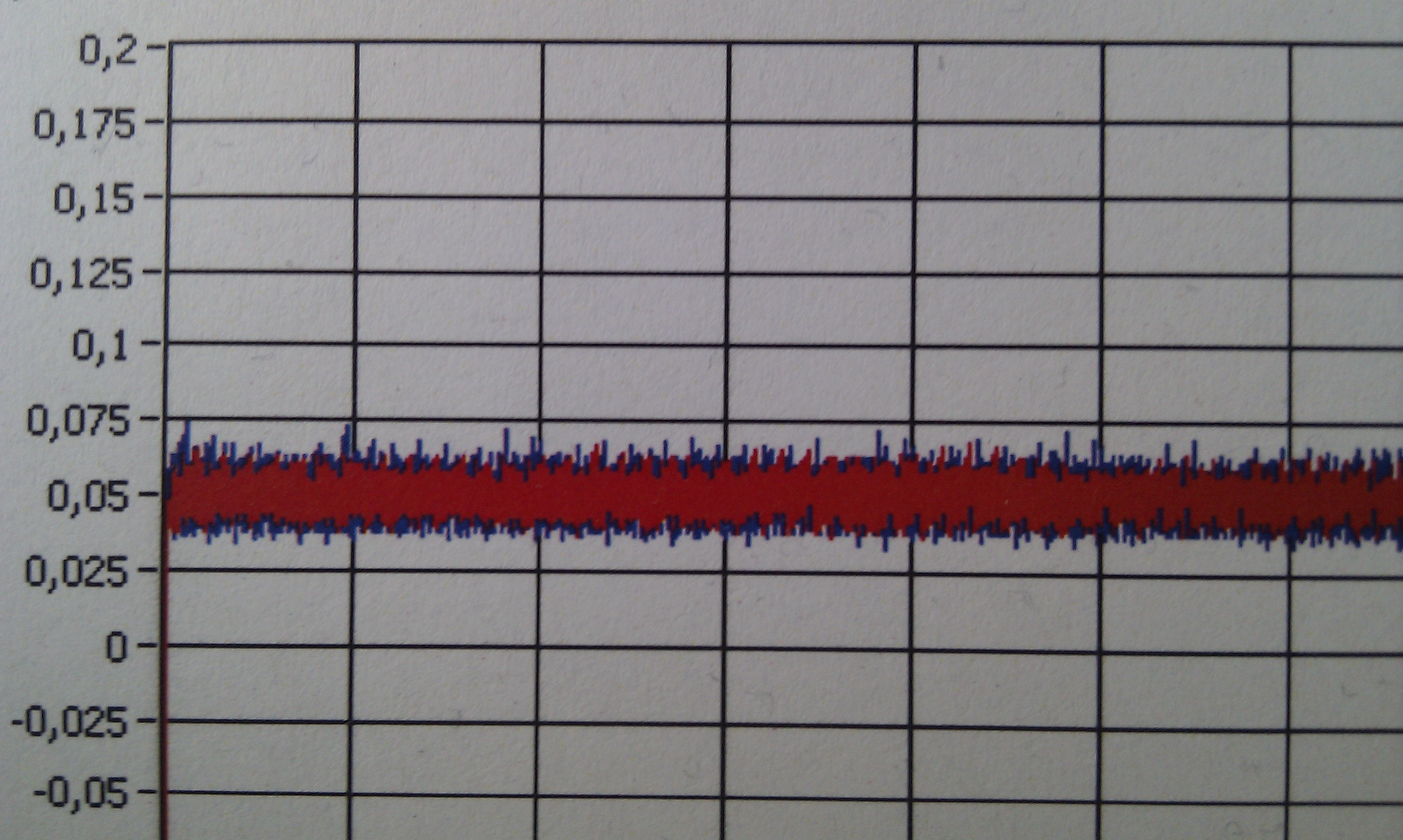
Sample100Hz_Speed5.jpg
650 KB -

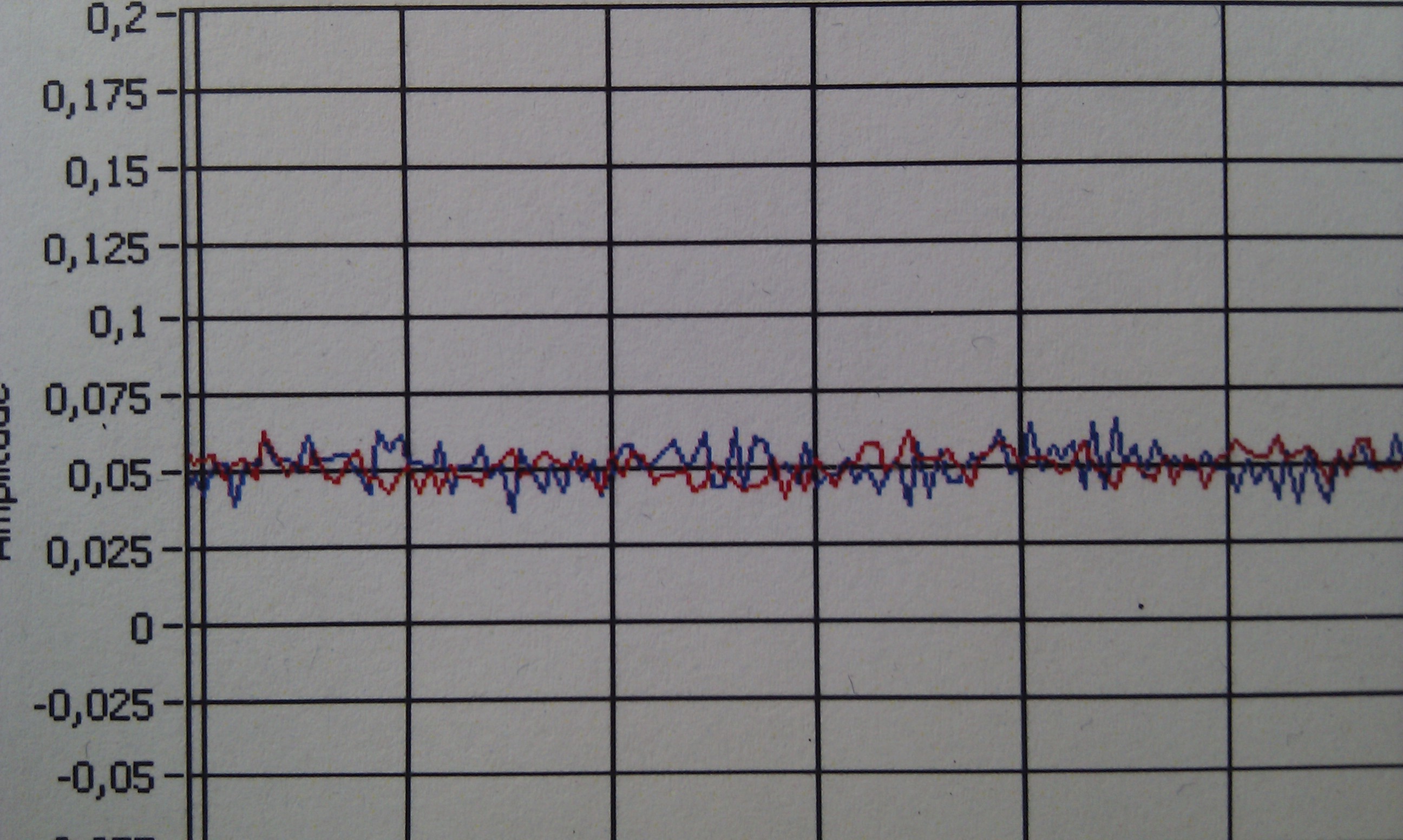
Sample100Hz_Speed5_Zoom.jpg
680 KB
{kind=link}
Guten Tag zusammen, Eine Video kann ich nicht machen... [geheimhaltungsklausel] Aber ein Auszug der Messwerte habe ich hier natürlich anonymisiert angehängt. Der Schrittmotor fuhr mit 5°/Sec und die Werte wurden mit 100Hz gesamplet. Man sieht wie die geschwindigkeit um 5 hin und her schwingt gruss Debo
Deborah schrieb: > Bei einer dynamische Messung hätte man einfach mit der bekannten > konstanten Lauf bzw Geschwindigkeit die Messpunkt interpoliert um so zu > tun als ob die Messung statisch wäre... Hallo, dazu braucht man aber keinen absolut konstant laufenden Motor, es würde völlig genügen, die Messpunkte durch einen Encoder zu bestimmen. Aber ich weiss, steht nicht in der Spezifikation... Wenn man so denkt oder denken muss, solltem man nichts konstruieren, denn es muss auch möglich sein, sich von einer schlechten Spezifikation zu lösen. Genau gesagt, das ist eigentlich der Normalfall, weil man erst bei der Realisierung sieht, ob die Spezifikation tragfähig ist. Diese hier ist es nicht, würde ich jedenfalls als Fazit aus der bisherigen Diskussion ziehen. Das wird so nicht zufriedenstellend funktionieren, entweder Getriebe verwenden oder Messung durch Encoder steuern. Gruss Reinhard
Günter Olaf schrieb: > Ihr habt alle keine Ahnung Richtig, 50 Antworten und alle von Ahnungslosen, nur Rami K. kam dem Problem näher. Nach dem du den 6 Jahre alten Thread mit deinem Unsinnsbeitrag schon mal hoch geholt hast, hier wenigstens die Auflösung: Ein Schrittmotor kann und wird beim langsamem Drehen keine absolut gleiche Winkelgeschwindigkeit haben, weil auch bei optimaler sinusförmiger Microschrittbestromung der Anker immer du den Rastpositionen gezogen wird. Je stärker die magnetische Rastung wirkt, also das Verhältnis Haltemoment zu Rastmoment, um so grösser ist der Winkelfehler. Steht alles in der http://www.dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10 Will man etwas gleichmässig langsam drehen braucht man Motore ohne Rastmoment, Glockenanker-Gleichstrommotore und PMSM mit Vektorsteuerung wären besser geeignet.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.