Hallo, ich bin gerade dabei einen Roborter mit Hinderniserkennung zu konstruieren. Für die Distanzsensoren habe ich mich für Reflexlichtschranken entschieden. Wenn ein Objekt durch die Lichtschranke erkannt wird, soll ein digitales Signal an die Verarbeitung (Arduino) weiter gehen. Da ich Hindernisse rechtzeitig und sicher erkennen will, brauche ich für die jeweilige Reflexlichtschranke eine Distanz von mindestens 10cm. Ultraschallsensoren kommen für mich nicht in frage, da diese preislich zu teuer sind und zu ungenau sind. Ich habe bereits versucht den CNY70 durch eine IR diode und Phototransistor zu ersetzten. Den Vorwiderstand für die IR diode habe ich verkleinert, damit der maximale Strom fließen kann. Die Frequenz habe ich auf 30kHz erhöht. Jedoch bleibt der Phototransitor gesperrt und ich bekomme keine Signaländerung am Ausgang. Ist eine distanz von 10cm mit einer Reflexlichtschranke überhaupt möglich. Am besten wäre es wenn man sie nach Plan selbst bauen könnte. Ich würde mich freuen wenn jemand eine Antwort darauf weis
Angehängte Dateien:
-

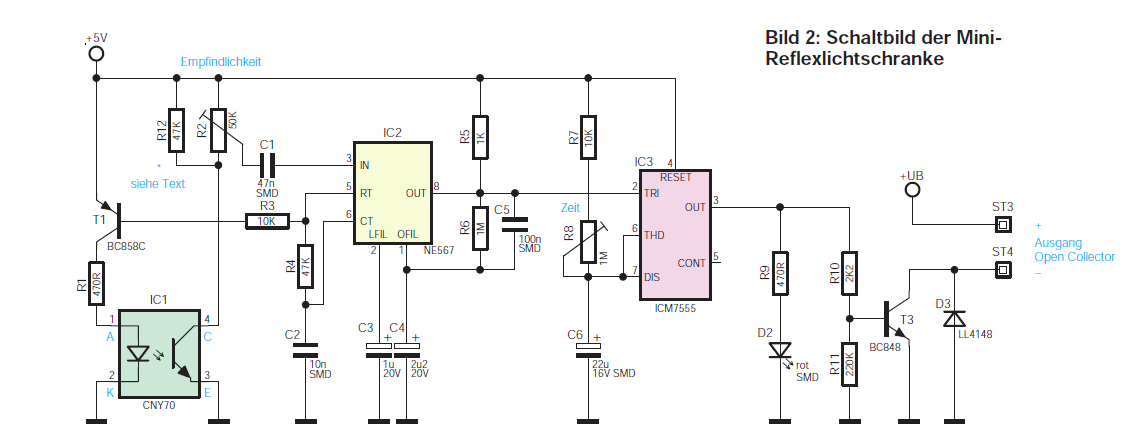
neu.PNG
52 KB
Pascal schrieb: > Ist eine distanz von 10cm mit einer Reflexlichtschranke überhaupt > möglich. Das kommt ganz darauf an, wie gut die Oberfläche reflektiert. Gruss Harald
Okay danke muss ich noch einmal anschauen. Gibt es eventuell noch andere Distanzsensoren (ausgenommen Ultraschallsensoren) die hierfür geeignet sind? Gruss Pascal
Hallo, schau dir mal die Fernbedienungsempfänger wie z.B die TSOP 31238 an, im Normalfall sind 2-3 Meter reflektiert kein Problem. Wenn du kürzere Abstände brauchst, musst Du nur die Sendefrequenz der Sendedioden ein wenig verstimmen. Ich habe auch mal so ein Teil gebaut und das lief recht zuverlässig. Ich hatte allerdings einen Bürostuhl mit schwarzen genarbten Kunststofffuß, den wollte er absolut nicht erkennen. Da half dann doch nur Ultraschall. Gruß aus Köln Frank
Es gibt optische Distanz Sensoren, z.B. von Sharp. Da brauchst Du nur Stromversorgung und einen ADC anschließen.
@Stefan Frings Meinst du diese GP2... Sensoren, die sind ja preislich ähnlich teuer wie US und arbeiten auch optisch. Ich sage nur Bürostuhl. ;) Gruß aus Köln Frank
Harald Wilhelms schrieb: > Das kommt ganz darauf an, wie gut die Oberfläche reflektiert. Und auch, wohin sie reflektieren. Irgendwelche Tarnkappenflugzeug funktionieren deshalb, weil die auf sie treffenden Signale überall hin reflektiert werden, nur nicht zum Sender ;-) Frank aus Köln schrieb: > schau dir mal die Fernbedienungsempfänger wie z.B die TSOP 31238 an, im Falls es eigene Sensoren sein sollen, gibt es die Signalaufbereitungselektronik auch separat als VSOP383 oder VSOP584
Pascal schrieb: > Ultraschallsensoren kommen für mich nicht in frage, da diese preislich > zu teuer sind und zu ungenau sind. Ein Preis von unter 2 EUR, wie man ihn z.Z. beim Händler in China für einen HC-SR04 zahlen muß (z.B. eBay 250973476855), kann eigentlich kein Argument dagegen sein. Hast du schlechte Erfahrungen mit der Genauigkeit bzw. wie genau soll deine Messung denn sein? Optisch liegst du preislich wesentlich höher, wenn du die Reflektionseigenschaften deiner Hindernisse nicht sehr genau kennst.
Vielen Dank für die vielen Antworten. Ich schaue mir die Datenblätter der Fernbedienungsempfänger genauer an. Am Anfang habe ich auch an Ultraschallsensoren gedacht. Auf ebay habe ich jedoch nicht nachgeschaut... Bei dem Arduino Ultraschallsensor ist die Frequenz fest moduliert oder? Wenn ich mehrere Ultraschallsensoren von diesem Typ anbringe, dann kommt es ja zu verfälschungen. Wäre es vielleicht Praktischer eine Art Radar Ultraschallsensor zu bauen, der einen gewissen Bereich abfährt? Gruss Pascal
Pascal schrieb: > Wäre es vielleicht Praktischer eine Art Radar Ultraschallsensor zu > bauen, der einen gewissen Bereich abfährt? Geht alles: ttp://www.mikrocontroller.com/jufo/kapitel3_5.htm
Komplett integriert geht es auch mit einem Triangulatiossensor, wie dem iC-LO. Das deutsche Datenblatt ist hier: http://ichaus.biz/upload/pdf/LO_datasheet_A1de.pdf
Pascal schrieb: > ich bin gerade dabei einen Roborter mit Hinderniserkennung zu > konstruieren. Für die Distanzsensoren habe ich mich für > Reflexlichtschranken entschieden. Mehrzahl? Wieviele denn? Womöglich mit überlappendem Erfassungsbereich? > Da ich Hindernisse rechtzeitig und sicher erkennen will, brauche ich für > die jeweilige Reflexlichtschranke eine Distanz von mindestens 10cm. Du willst aber nicht wirklich eine Distanz messen, sondern nur "Objekt" vs. "kein Objekt"? Distanz geht mit Reflexlichtschranke nur, wenn die Reflexionseigenschaften des Targets bekannt und konstant sind. > Ist eine distanz von 10cm mit einer Reflexlichtschranke überhaupt > möglich. Solange deine Hindernisse im Infrarot reflektieren, sollte das kein Thema sein (Infrarot deswegen, weil Lichtempfänger für diesen Bereich handelsüblich sind). Viel spannender ist die Frage, mit welchen Störungen in Form von Fremdlicht du beim Einsatz rechnen mußt. Fernbedienungsempfänger halte ich für eine Schnapsidee, weil dann dein Roboter auf jede Fernbedienung (oder auch nur eine Leuchtstofflampe) reagiert. Auch mehrere deiner Lichtschranken würden sich dann gegenseitig stören. Am sichersten dürfte sein, jede Lichtschranke mit ihrer eigenen Pulsfrequenz zu betreiben und einen Korrelationsempfänger zu verwenden. Die Frequenz würde ich dann niedriger ansetzen, so zwischen 1kHz und 5kHz. Technisch lösen könnte man das mit einem ATtiny o.ä. Der bräuchte nur einen hinreichend schnellen ADC (mindestens 2-fache, besser eher 10-fache Pulsfrequenz). Dann einfach die ADC-Meßwerte mit den ausgesendeten Impulsen bewerten (+1 wenn LED an, -1 wenn LED aus) und einen gleitenden Mittelwert bilden. XL
Ich denke ich richte mich nach diesem Prinzip: http://www.mikrocontroller.com/jufo/kapitel3_5.htm Bei Triangulatiossensoren bestehen ebenfalls Problemen bei Schwarzen sowie reflektierenden Objekten. Dann werde ich mein Projekt etwas umändern. Vielen Dank für die Hilfe ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.