Bin gerade bei der Inbetriebnahme meines PID-Reglers, Algorithmus nach
http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-introduction/
Der Regler funktioniert nicht schecht, jedoch habe ich eine Anomalie.
Das Vorzeichen des D-Anteils schwankt bei jedem dritten Einlesen der
Temperatur mit Neuberechnung des PWM-Wertes, und das selbst dann, wenn
die Temperatur deutlich über der Solltemperatur liegt. Sollte der
D-Anteil eigentlich nicht über die gesamte Zeit mit negativem Vorzeichen
über die gesamte Abkühlphase nach unten zeigen?
Was meinen die Experten zu der Gewichtung von kp, ki und kd? Hab hier
nur ein sehr kleines Modell mit LM75 als Temp.sensor und nem
5W-Widestand als Heizung in 5mm Entfernung...
Aaaaaaahhhhhhhh - float - aaaahhhhhhh. Sowas macht mal in Integer, oder
Longint.
Schon mal was von Debuggen gehoert ? Ich schliess da jeweils das UART an
und lese mir die Werte aus. Da kann man alles mitverfolgen.
Purzel schrieb:> Aaaaaaahhhhhhhh - float - aaaahhhhhhh. Sowas macht mal in Integer, oder> Longint.> Schon mal was von Debuggen gehoert ? Ich schliess da jeweils das UART an> und lese mir die Werte aus. Da kann man alles mitverfolgen.
Bei ner Temperaturregelung wird wahrscheinlich Float völlig reichen
(geschwindigkeitstechnisch).
Joachim ... schrieb:> Das Vorzeichen des D-Anteils schwankt bei jedem dritten Einlesen der> Temperatur mit Neuberechnung des PWM-Wertes, und das selbst dann, wenn> die Temperatur deutlich über der Solltemperatur liegt.
na und? Der D-Anteil hängt ja auch nicht von Temperatur-Solltemperatur
ab, sondern von der Änderung dieses Werts.
Joachim ... schrieb:> Jetzt habe ich drei Antworten bekommen von denen sich keine auf meine> Fragen bezieht...
Was erwartest du bei einer unvollständigen Frage? :-)
>Sollte der D-Anteil eigentlich nicht über die gesamte Zeit mit negativem >Vorzeichen über die gesamte Abkühlphase nach unten zeigen?
Nein, da ist Dein Denkfehler. Dein D-Anteil hängt vom dErr ab. Und der
hat nix mit der Soll-Ist-Differenz zu tun, sondern mit dem Meßfehler
zwischen den Abtastungen. So interpretier ich Dein Programm. Schau Dir
doch noch mal diese Zeilen an:
>dErr = (error - lastErr);
und
>lastErr = error;
Wenn Dein Abtastwert trotz gleicher Ist-Temperatur schwankt, so kann es
positive D-Anteile geben.
Ist der Code abgekupfert oder selbst überlegt?
>Wenn Dein Abtastwert trotz gleicher Ist-Temperatur schwankt, so kann es>positive D-Anteile geben.
In diese Richtung ging meine Überlegung - aber ich war nicht sicher,
zumal ich hier noch n paar Probs physikalischer Art habe und der
"Fehler" dadurch verschleiert wird...
>Ist der Code abgekupfert oder selbst überlegt?
abgekupfert:
http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-direction/
Wenn schon abgekupfert, so mach Dir noch ein paar Gedanken dazu. Alles
läßt sich verbessern.
Eine Meßtoleranz darf auf den D-Anteil keinen Einfluß haben.
Ergo: Laß einen D-Anteil nur entstehen, wenn das Error-Delta größer als
ein vorgegebener Grenzwert ist. Diesen Grenzwert legst Du fest. Am
bestesten im Header (also nur an einer Stelle im Programm) als #define
oder auch als eine Variable. Schon beruhigt sich die Regelung.
Im Prinzip ist bei einer Temperaturregelung ein D-Anteil nicht die beste
Wahl. Die Strecken haben im allgemeinen eine zu große Trägheit, als daß
ein D-Anteil Sinn macht. P- und I-Anteile sind wichtig. I relativ
gefährlich, wenn er zu schnell und zu weit wachsen kann.
Have fun.
>I relativ gefährlich, wenn er zu schnell und zu weit wachsen kann.
Hihi. Ds ist auch meine Erfahrung. Ich habe ne Menge bei diesem Projekt
gelernt u. aufgefrischt aber wohl noch nicht alle physik. Zusammenhänge
meines Aufbaus genau durchforscht. Möglicherweise steckt auch noch der
ein oder andere Rundungsfehler mit drinne der für Ungenauigkeiten sorgt.
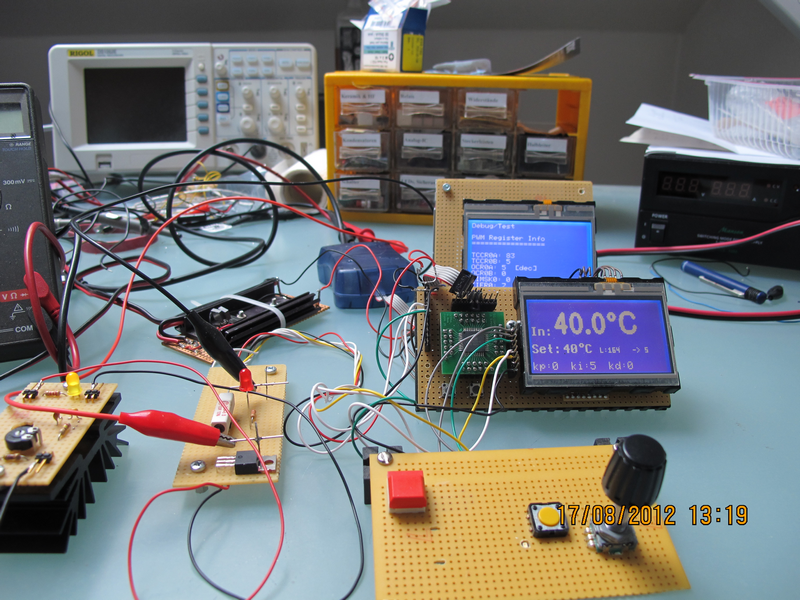
Im Mom. jedenfalls pendelt der Regler noch bei 60°C um +-2°C.
Interpretiere ich das Foto richtig?
Hast Du einen reinen I-Regler zum Testen verendet?
Der wird immer schwingen, wenns den ein reiner I-Regler ist, ohne
nichtlineare Beeinflussung des I-Anteils.
Nee, de Regler ist gerade im ausgeregelten Zustand, die Anteile kp, ki
u. kd sind im Moment des fotografierens zufällig bei 0 bzw ki = 5
(entsp. 5/255 PWM-Wert). Ich habe mehrere LCD-Bilder angelegt, bei einem
kann ich per Drehgeber die P-, I- und D-Verstärkung einstellen und per
Scrollbalken anzeigen.
Ursprünglich ging es mir nur um das Verständis des PID-Regelvorganges,
mittlerweile macht aber das ganze komfortable und verschwenderische
Drumrum (float-Variablen!) den Schwerpunkt der Software aus. Manchmal
wedelt der Schwanz halt mit dem Hund.
@ Joachim ... (joachim_01)
>Nee, de Regler ist gerade im ausgeregelten Zustand, die Anteile kp, ki>u. kd sind im Moment des fotografierens zufällig bei 0 bzw ki = 5>(entsp. 5/255 PWM-Wert).
Deine selbstgestrickte Verwednung der Begriffe ki, kp und kd ist
irreführend. Denn diese Namen beschreiben die Koeefizienten im Regler,
mit denen der PID Anteil jeweils gewichtet wird, NICHT die Eregbnisse
dieser Gewichtung mit dem Fehlerterm!
Du hast recht. Jetzt, wo ich das alles aus der Distanz so sehe... Auch
actualPvalue ist nicht der echte Wert, ich habe ihn über mehrere
Menüebenen weitergereicht und den Namen beibehalten, in Wahrheit ist er
nur ein Beiwert. Das Prob war, daß an dem Projekt gleich mehrere neue
Themen auf mich zukamen, wenig AVR-Erfahrung, nen Touch-Display das es
zu erforschen galt, mehrere unterschiedliche Temp-Sensoren LM75, PT-100,
NTC, NTC + OP-Reglerschaltung Sensoren hab ich ausprobiert. Irgendwann
kam es dann zu Schlampereien, Überblickverlust und 'leichten'
Denkfehlern... Mangel an Disziplin?
Schau dir auch mal AVR221 an. Dort wird ein PID Regler mit ein bisschen
mehr Theorie zur Regelung und den P,I und D Koeffizienten beschrieben.
Einfach und robust ist er auch nach meinen Erfahrungen. Ich regle
allerdings damit Motore und keine Temperaturen.
> Laß einen D-Anteil nur entstehen, wenn das Error-Delta> größer als ein vorgegebener Grenzwert ist
Dann leg Dir lieber einen Ringbuffer an mit z.B. 10 Werten. Den D-Anteil
gewinnst Du aus der Differenz zwischen dem neuesten und dem ältesten
Wert dividiert durch 10. Das bringt Ruhe in die Regelung und erhöht die
Auflösung. Die Temperaturwerte stammen ja ursprünglich aus dem
AD-Wandler und hatten dort eine relativ geringe Auflösung. Bei den
meisten Temperaturregelungen reicht es, die Regelung ein mal pro Sekunde
aufzurufen. Dann kann man das auch problemlos in float rechnen.
D = (Tbuf[neu] - Tbuf[alt]) / BUFFSIZE;
Die Ringbuffer sollte so ausgelegt sein, dass er sich in ca. 20-30% der
Zeitkonstante Deiner Regelstrecke komplett füllt, ansonsten wird der
D-Anteil träge. Anstatt durch BUFFSIZE zu dividieren, kann auch Kd
angepasst werden.
Du bringst die Begriffe etwas durcheinander, bei Kp, Ki und Kd handelt
es sich um die Regelparameter:
#define KP 0.4
#define KI 0.01
#define KD 0.4