Hallo, mein Schrittmotor (42BYGHW811) zittert. Dazu gibt es zuhauf Foreneinträge übers gesamte Internet verteilt, aber ich finde einfach nichts was mir helfen könnte oder wie ich es in meinem konkreten Fall umsetzen muss. Ich steuere den Motor mit einem L297 + L298 an. Angeschlossen ist alles wie auf dem Datenblatt des L298. Mein Arduino hängt am Clock Pin des L297. Die Sensorwiderstände Rs sind 0.5 Ohm stark. 2.5A schafft der Motor, mit Rs komme ich damit auf 1.25V für Vref. Im Moment habe ich aber nur 1V an Vref. Die Supply Voltage für den Motor ist im Moment 12V, da mir nur ein PC Netzteil zur Verfügung steht(12v sind gering, aber es sollte funktionieren). Schließe ich einen alten Schrittmotor aus einem Drucker an, läuft alles super. Erst habe ich es mit einer höheren Frequenz am Clock Pin versucht. Dabei ist er regelrecht rum gesprungen (180° hin und zurück). Dann bin ich zu Testzwecken bis auf ein Herz runter gegangen (Zittern). Bin mir noch nicht mit dem duty cycle am Clock Pin sicher. Müssen das 50% sein? Im Stand (aber enabled) steht er im Übrigen ganz ruhig. Manchmal pfeift er, aber das soll bei dem neuen Schrittmotoren normal sein (sagt Google). Die Leitungen der beiden Windungen habe ich auch schon *hin und her getauscht* , weil man den Angaben auf dem Datenblatt (Farbe) auch nicht immer trauen kann. Was Lustig ist, dass wenn ich das Jumper Kabel zum Clock Pin in der Hand halte(Kontakt berühre), der Motor stetig in die vom Richtungspin vorgegebene Richtung an zu Steppen beginnt. Braucht es iwo möglicherweise größere Kondensatoren? Wenn ja, wo?(iwas von wegen Faustregel: 1000µF pro Ampere gelesen) Leider habe ich keinen Oscillator mit dem ich Prüfen könnte ob irgendwo Schwingungen drin stecken, wo sie nicht hingehören. Dazu sei noch zu sagen, dass sich *Motor und Logik die selbe Masse teilen* (wie sollte ich sie beim PC Netzteil trennen?). Hmm was sollte ich noch erwähnen? Da der Motor aus dem Drucker lauft, würde ich sagen, dass die Dioden nicht iwo falsch rum drin stecken und soweit alles richtig angeschlossen ist. Halfstep Pin ist Low. Enable High. Richtungspin High. Control High. Sync + Home sind unbelegt. Dann habe ich noch gelesen, dass einige zum prüfen LEDs an die Motorleitungen packen. Allerdings weiß ich nicht genau was man damit genau prüfen will. Möglicherweise ob der L298 noch was taugt(Ob er jede Windung anspricht)? Wo liegt nun der Fehler? Danke im Voraus für eure Antworten. Mit freundlichen Grüßen Halo
Hast du die standard app note von ST umgesetzt oder modifiziert? Zeig mal deinen Aufbau als Bild und Schaltplan.
Angehängte Dateien:
-

L298standard.gif
13 KB
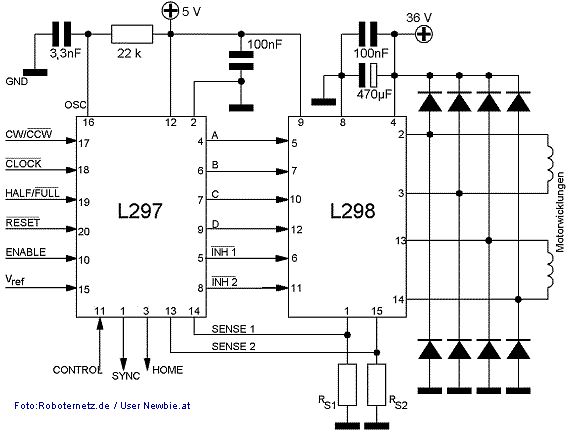
Das hier ist der Schaltplan: http://www.rn-wissen.de/images/7/77/L298standard.gif Ich habe also alles so umgesetzt. Für ein Bild muss ich den Akku meiner Kamera erst laden. Wie fügt man hier ein Bild richtig ein? Solange besser hier der link: http://www.rn-wissen.de/index.php/Schrittmotoren#Schaltung_zum_Ansteuern_eines_Schrittmotors_mit_L298_und_L297
Solltest mal mit 100mA probieren. Diese Hochleistungsmotoren brauchen eine solide Aufhängung, elastische Kupplung und Last. Wenn sie lose auf dem Tisch liegen springen sie nur wild hin und her.
Ok 100mA heißt 0.5O*0.1=0.05Vref Kein Name schrieb: > Solltest mal mit 100mA probieren. 100mA mittels Vref wirst du wohl nicht meinen. Bei 0.5 * 0.1 bleibt nicht mehr viel Volt dafür übrig. Ein Netzteil bei dem man die Ampere einstellen kann hab ich nicht. Kein Name schrieb: > Wenn sie lose auf > dem Tisch liegen springen sie nur wild hin und her. Springen tut er jetzt nicht. Das Zittern und die Bewegungen sind lediglich auf die Welle bezogen. Kein Name schrieb: > Diese Hochleistungsmotoren brauchen eine solide Aufhängung Uhh bei den 20 € die ich dafür in Kanada ausgegeben hab, hätte ich damit nicht gerechnet ^^ Kein Name schrieb: > Last Fällt da einen ein einfachen DIY Aufbau ein?
Hi Halo, Ich glaube der Fehler in Deiner Schaltung ist dass bei Dir VREF nicht fein einstellbar ist. Je niedriger VREF ist, desto weniger Strom zieht der Motor. Damit lässt sich der Motorstrom einstellen. Zumindest bei meinem Motor hört man auch ein leises Zischen vom Motor her welches von der schnellen Stromabschaltung bei Erreichung des Maximalstroms hervorgerufen wird. Es ist wichtig beim Aufbau darauf zu achten dass es keine Stromschleifen im Anschluss des L297 gibt, da bei den geringen Spannungen der Strommesswiderstände sich dann leicht Fehlspannungen einschleifen die das richtige Arbeiten des Chopperbetriebs beeinträchtigen könnte. Die Kombination L297 + L298 arbeitet bei sorgfältigen Aufbau absolut zuverlässig. Vibrationen der Motorwelle an der Last durch Eigenresonanzen lassen sich meist nur durch elastische Kupplungen oder durch Inertial Dampers vermindern. Was sich bei mir bewährt hat ist der Einsatz von Timing Belts und Räder. Hier ein paar Links zum Thema: http://mcsupplyco.com/uploads/images/drawings/pdf1/SYNCGUIDE.pdf http://mech.vub.ac.be/teaching/info/mechatronica/finished_projects_2005/PICROCK/Electronic.htm http://www.smartdrive.co.uk/A%20Technical%20Guide%20to%20Stepper%20Motors.pdf mfg.
mach mal, dass bei Deinem Arduino die Frequenz die Du zum Step Pin schickst einstellbar ist. (Poti an den ADC) Damit kannst Du dann probieren ob der Motor bei allen oder nur bei bestimmten Frequenzbreichen diese Probleme hat. Grosse Stepmotoren moegen keine hohen Frequenzen aus dem Stand, da muss ne Rampe her, die Du dann mit dem Poti mal ausprobieren kannst. Ju
Juergen G. schrieb: > Damit kannst Du dann probieren ob der Motor bei allen oder nur bei > bestimmten Frequenzbreichen diese Probleme hat. Wenn ein Schrittmotor bei 1 Hz ein Problem hat, dann liegt das nicht an fehlender Rampe oder Resonanzen. Vielleicht mag das PC Netzteil die Chopper Last nicht. An einem Labornetzteil könnte man den Motor auch mal von Hand betreiben, d.h. mit 2.5V und ein paar Kippschaltern zur richtigen Bestromung der Wicklungen.
Angehängte Dateien:
-

stepper.jpg
150 KB
{kind=link}
{kind=link}
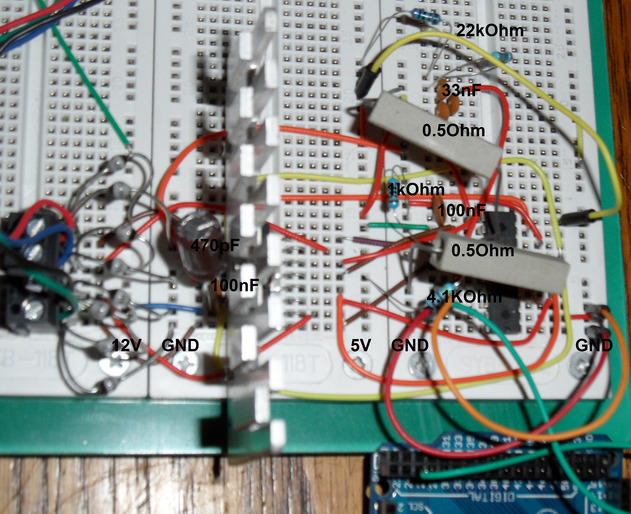
Das ist mein zugegebenermaßen ziemlich verunstaltetes Breadboard (die Kabel und alles ordentlich zu verlegen muss ich auch noch lernen^^). Also eben habe ich beobachtet, dass wenn der Jumper vom Clock Pin frei in der Luft hängt , der Moter sich nicht bewegt und er sobald man ihn ins Arduino an einen Pin anschließt der LOW ist die Welle des Motor regelrecht verrückt spielt. Wenn ich den Jumper anfasse, steppt der Motor wie geschildert mit 1/3 Umdrehung pro Sekunde in die vorgegebene Richtung. Irgendetwas stimmt hier doch an der Masse nicht! Zwischen Clock und Masse habe ich 1 Volt gemessen....?
>Wenn ich den Jumper anfasse, steppt der >Motor wie geschildert mit 1/3 Umdrehung pro Sekunde in die vorgegebene >Richtung. Wenn das passiert, dann ist die ganze Verkabelung Mist. Einstreuungen von 50 Hz durchs Berühren sollten bei guter Masseführung, niederohmigem Aufbau und simpler Leitungsführung nicht möglich sein. Bei Dir passierts aber. By the way: Eein Bild mit 3 MB schau ich mir nicht an. Warum auch? Fasse Dich kurz.
oops! Verlangst Du von dem Kabelverhau wirklich das er einen 2A Schrittmotor vernuenftig bewegt? Du musst beim Design eines Schrittmotortreibers die selben Dinge beachten die auch beim Design eines Schaltnetzteils zutreffen. Das ist letztendlich das selbe Prinzip. Speziell den Teil nach dem L298. Mach da mal die Kabel weiter auseinander. Das der Logikteil sehr empfindlich ist hast Du ja schon gemerkt. Mit dem PC Netzteil ist das auch so ne Sache. Wenn das schon ein etwas aelteres Semester ist, reichen die C's darin sicher nicht mehr aus um den Mist den der Steppertreiber produziert zu kompensieren. Mach mal an die 12V Versorgung des L298 einen grossen Elko + 100nF in parallel, und an die Versorgung der 5V einen Elko > 100uF + 100nF parallel.
hab schon sehr seltsame Effekte mit höheren Strömen bei Steckbrettaufbau gehabt! Würde empfehlen alle Verbindungen, die höhere Ströme leiten (L298, Shunts, ...) zu löten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.