Hallo zusammen, ich habe eine Polygonmotor mit dem IC m56750 'erbeutet' und verzweifele gerade bei der Ansteuerung. Laut Datenblatt, welches nicht so prall ist, habe ich 2 Signale die die ich bedienen muß. ACC und DEC, also beschleunigen und bremsen. Wenn ich, wie im Datenblatt steht, die Eingänge mit PWM ansteuere und wähle für DEC 50%(H)/50%(L) Aufteilung bei einer Periode von 0,5ms. ACC wird mit dem invertieren Signal beschaltet. Eigentlich hätte ich gedacht das ich mich so im mittleren Drehzahl bewege. Is aber nicht. Der ausgang CPout, der von der Ladungpumpe gesteuert wird, liegt eine Trapezspannung mit +/- 1,4V also Vollausschlag laut Datenblatt. Erst wenn ich den ACC Eingang mit 20%(L)/80%(H) sieht man eine Bremswirkung. Vielleicht hat jemand Erfahrung mit dem Käfer und kann mir ein paar Tipps für die Ansteuerung geben. Gruß Verwirrter
Angehängte Dateien:
-

Unbenannt.JPG
35 KB -

blockschaltbild.JPG
73 KB
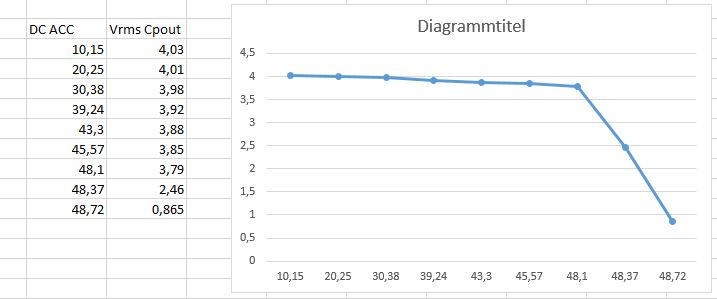
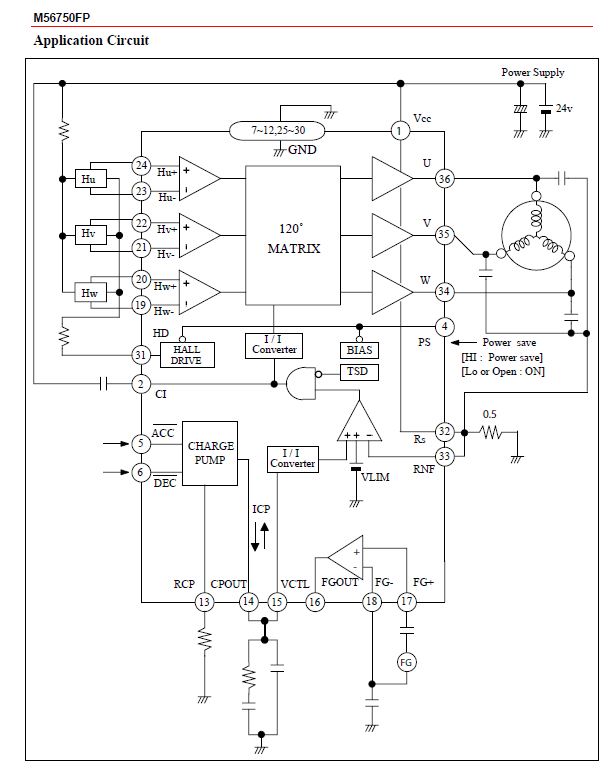
Hallo Verwirrter, gibts mittlerweile neue Erkenntnisse? Ich kann das Verhalten bestätigen, im Bereich von dutycycle 0% bis 48% verändert sich die CPout Spannung kaum, dann wird die Kurve steil abfallend (siehe Bild 1). Auch scheint es mir nicht sinnvoll das Ding mit einem Rechteck und dessen Inverser anzusteuern, schließlich hätte der Hersteller einfach einen Inverter einbauen können. Hat jemand eine Idee wie man das Teil "richtig" ansteuert? Wenn man in den CPout Pin (bzw VCTL Pin) eine Analogspannung füttert lässt sich die Motordrehzahl über ein Poti übrigens wunderbar einstellen. Hier mal der Link zum Datenblatt, in Bild 2 das Blockschaltbild. http://pdf1.alldatasheet.com/datasheet-pdf/view/90265/HITACHI/REJ03F0049_M56750FP.html (Ich habe jetzt mal ganz schamlos diese Leiche ausgegraben weils m.M.n keinen Sinn macht für genau die selbe Frage nen neuen Thread aufzumachen, falls doch bitte sagen) Grüße, Andreas
Hi Dein Verhalten könnte darauf schließen lassen, daß Du die Suche benutzt hast - aber glaube mir, man kann es nicht Jedem recht machen ;) Habe das Datenblatt nur überflogen, würde aber die Anschlüsse ACC und DEC als Impuls-Eingänge benutzen wollen, also nur, wenn ich an der Geschwindigkeit was ändern will - einen dauernden PWM halte ich dort für nicht zielführend. Was hast Du an den Hall-Eingängen dran, oder sind Diese bereits im Motor integriert? (HU, HV, HW - wobei mich die Grafik des Stromverlauf etwas stutzig macht, hätte da zwischen HU und der Spule U mehr 'Phasengleichheit' erwartet) Per HD kann der Chip die Sensoren abschalten (GND entziehen), versorgt werden Diese extern. Sieht aber so aus, daß jeweils zwei Hall-Sensoren verbaut wären/gehören. MfG
Patrick J. schrieb: > einen dauernden PWM halte ich dort für > nicht zielführend. Wenn ich so darüber nachdenke leuchtet das eigendlich ziemlich ein.. Und macht die Drehzahlregelung einfacher! Bleibt die Frage wieso 2 Pins, weil aktiv Bremsen tut der Motor nicht wenn man am /Acc = 1 und am /Dec = 0 anlegt. Was könnte sich der Hersteller dabei gedacht haben, schließlich würde der Acc Pin doch ausreichen? Es handelt sich um ein komplettes Belichtungsmodul aus nem Laserdrucker (HP Laserjet), die Hall Sensoren sind soweit ich das überschauen kann im Motor verbaut, und auf den Eingangs Pins liegen wenn der Motor läuft die 3 Sinusse an.
Hi 2 Pins, da Du ohne weiteren Änderungswunsch wohl bei der aktuellen Drehzahl bleiben willst. Wenn's zu langsam ist, ACC antippen, wenn's zu schnell ist, DEC. Da der Motor synchron getrieben wird - also die interne Drehzahl entspricht der Drehzahl des Motor - kann der Motor auch nicht 'auslaufen', bis die Wunsch-Drehzahl erreicht ist, sondern muß aktiv verlangsamt werden. MfG
Patrick J. schrieb: > Wenn's zu langsam ist, ACC antippen, wenn's zu schnell ist, DEC. Funktioniert wunderbar, danke für die freundliche Hilfe! Manchmal sieht man den Wald vor lauter PWM nicht ;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.