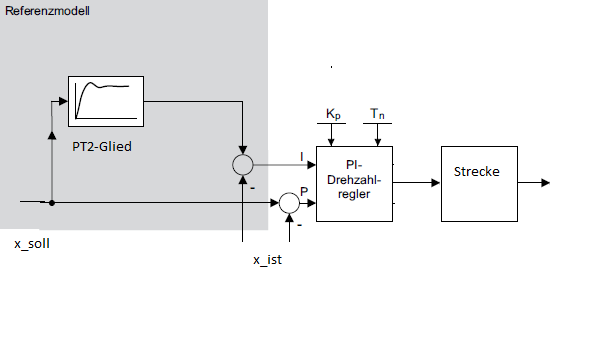
Hy Leute Mir bereitet die Vorsteuerung und des Refernzmodells einer Kaskadenregelung einige Schwierigkeiten. Die Kaskadenregelung besteht aus Lage- Drehzahl- und Stromregler. Lageregler ist ein P-Regler, Drehzahl und Strom sind PI-Regler. Die Drehzahlvorsteuerung soll ja den Lageregler entlasten und ein Signal proportional der Bahnberechnung auf den Eingang des Drehzahlreglers legen. Doch wie genau sieht die Struktur der Vorsteuerung aus? Handelt es sich dabei nur um ein P-Glied oder PT1-Glied oder ähnlichem? Als einstellmöglichkeiten habe ich nur eine Ersatzzeitkonstante. Das Referenzmodell, dass im I-zweig des Drehzahlreglers ist, bereitet mir auch Probleme. Es besteht aus einem PT2-Glied und soll den p-geregelten Drehzahlkreis nachbilden. Doch leider findet man dazu keinerlei Literatur. Es würde mich freuen, wenn ihr mir die Strukturen und Funktionsweise genauer beschreiben könnt oder Informationen für mich habt. mfg Edwin
Angehängte Dateien:
-

referenzmodell.png
10 KB
:
Verschoben durch Moderator
Hat das was mit Ausbildung, Studium und Beruf zu tun? OK. Im entfernteren Sinne vielleicht mit Ausbildung.
Hy Hat mit Beruf bzw. Ausbildung zu tun. Wenn man versteht wie etwas funktioniert, kann man viel besser damit umgehen. Zum Thema Vorsteuerung: kann ich schlecht simulieren, da ich nicht genau weiß, wie diese aufgebaut ist. mfg
Edwin schrieb: > Hat mit Beruf bzw. Ausbildung zu tun. In diesem weit gefassten Sinne hat so ziemlich alles, was wir tun, mit Ausbildung zu tun. Ein richtiges Regelungstechnik-Unterforum gibt's nicht. Ich schieb' es mal nach DSP, weil ich denke, dass dort noch die meiste Kompetenz im Regelungstechnik-Bereich versammelt ist.
ich glaube, du müsstest uns deinen PI-Regler nochmals erklären... Ich kenne PI-Regler nur, die mit einem Regelfehler als Eingangswert arbeiten also (x_soll-x_ist). Dein PI-Regler hat noch einen I-Eingang. Was ist das? Mal ganz allgemein: Ein Referenzmodell kann 2 mögliche Zwecke haben 1. Es sagt dir, wie sich deine Regler-Strecke Kombination theoretisch verhalten soll. In dem Fall existiert das Referenzmodell nur auf dem Papier für die Rechnung und nicht im Blockschaltbild. Dann musst du das Verhalten Regler-Strecke ausrechnen und die freien Koeffizienten des PI-Reglers so wählen, dass das Verhalten entsteht, das dein Referenzmodell vorschreibt. 2. Du sprichst von modellbasierter Regelung. Da ist in der Regel irgendwo in deinem Regler ein Parallelmodell des Systems vorhanden. Über messbare Anteile des Zustandsvektors x kannst du mithilfe des Modells nicht messbare Größen schätzen, und sie dann in deiner eigentlichen Regelung verwenden. Das ist das einfachste Kästchen hierzu fürs Blockschaltbild http://de.wikipedia.org/wiki/Beobachter_%28Regelungstechnik%29
Angehängte Dateien:
-

referenzmodell2.png
10 KB
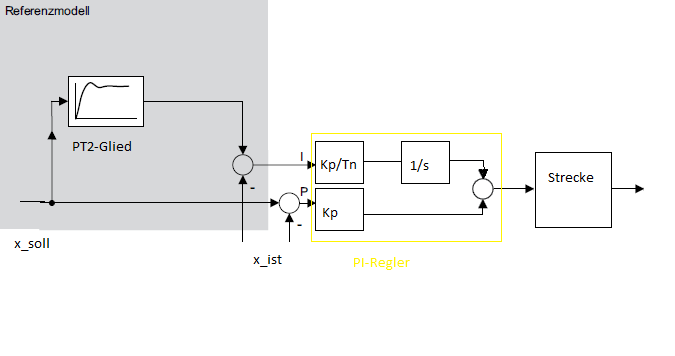
Hallo Ich hab den PI-Regler nochmal aufgesplittet dargestellt. Das Referenzmodell befindet sich in der Strecke des I-Reglers und wirkt wie eine Sollwertglättung und die Wirkung des Integrators wird hauptsächlich durch den Istwert beeinflusst. Ich kann mir aber noch nicht ganz vorstellen, auf welche Frequenz ich das Filter (Referenzmodell) einstellen muss. Im Vergleich: Übertragungsfunktion ohne Referenzmodell:
Übertragungsfunktion mit Referenzmodell:
Beobachter oder dgl. sind nicht verwendet, es geht nur darum, den I-Regler zu beeinflussen und das Überschwingen in der Sprungantwort zu verringern. mfg
Edwin schrieb: > und wirkt wie eine Sollwertglättung Ein I Regler per se glättet das Eingangssignal, eben weil er integriert. Edwin schrieb: > und die Wirkung des Integrators wird hauptsächlich durch den Istwert > beeinflusst. Wenn das die Regelungstechnik ist, die ich in meinem Studium gelernt habe, dann wird jegliche Reglerreaktion durch die Differenz aus Sollwert - Istwert gebildet. Sorry aber ich verstehe das alles hier nicht. Dein PT2 Glied hängt ausserhalb der Regelschleife und beeinflusst den I Anteil deiner parallelen P und I Regler. Irgendwie macht das für mich so keinerlei Sinn, vieleicht bin ich aber einfach zu lange aus der Materie draussen.
also gut, ich hab so etwas noch nicht gesehen. Was man üblicherweise PI-Regler nennt, sieht so aus: http://de.wikipedia.org/wiki/Regler#PI-Regler Der Term e(t) ist also im p- und im I-Anteil identisch. Das Ding hat also nur einen Eingang. Aber das soll mal hier egal sein, es geht da ja nur um den Namen. Schau dir aber doch mal die Struktur der Vorsteuerung bei der Kaskadenregelung an: http://de.wikipedia.org/wiki/Kaskadenregelung Hier arbeitet die Vorsteuerung nur als P-Regler Ich hab aber das Gefühl, wir reden immer noch aneinander vorbei ^^ woher hast du denn dein Blockschaltbild?
Hy Ja, ist ein etwas seltsamer Aufbau, drum der Vergleich zwischen einem normalen PI-Regler und dem mit Ref-Modell. Ah, hab ich vergessen zu erwähnen, es ist von einem Siemens-Antriebsregler, von da habe ich auch das Blockschaltbild, nur ist es halt stark vereinfacht (ohne Begrenzungen, usw). Leider spart Siemens auch bei der genaueren Beschreibung und in diversen Foren erfährt man nur, wie man das Modell ungefähr hindrehen kann. Ich möchte aber wissen, was es Bewirkt und wie man es richtig einstellt. Drehzahlvorsteuerungen, die nur mittels Verstärkung arbeiten, habe ich auch schon in der Literatur gefunden, aber laut Beschreibung, soll man den Verstärkungsfaktor möglichst 1 lassen und anhand der Ersatzzeitkonstanten die Regelabweichung zu Null machen. Darum möchte ich gerne wissen, wo diese Zeitkonstante eingebaut ist. mfg Edwin
Hy @Udo: Ich kannte bisher auch nur PI-Regler mit einem Eingang, aber bei diesem sind eben P- und I-Strecke getrennt. Und dass ein Ref-Modell Sinn macht, merkt man ja auch, da sich das Überschwingen der Sprungantwort reduziert, nur muss ich immer viele Male hin- und herprobieren, was sehr zeitintensiv ist. Die Reglerreaktion entsteht nach wie vor zwischen Soll- und Istwert, nur ist im Sollwert noch ein Filter verbaut. mfg
man kann das blockschaltbild auch umzeichnen. Dann haben wir einen herkömmlichen PI-Regler mit Soll-Ist-Vergleich. Auf dessen Ausgang wird aber, bevor es auf die Strecke geht ein I-Anteil (ebenfalls * Kp/Tn) aufaddiert. Dieser I-Anteil wird aus der Differenz x_filter-x_soll gebildet. Vielleicht sagt das ja jemandem was? Vermutlich aber nicht, denn: Wenn ich mir das auf deinem Bild so ansehe, scheint dieses PT2-Element denn Sinn zu haben, dass bei einer Sprunganregung (z.B. "Verfahre auf 100mm") der Integrator im PI-Regler nicht wie wild aufsummiert, sondern dem System erstmal die Chance gibt, mit dem P-Anteil zur Sollposition zu fahren. Erst nach einer Weile, die durch die PT2-Zeitkonstanten festgelegt ist, beginnt die I-Anteil stationäre Genauigkeit herzustellen und lässt den Antrieb in die endgültige Position fahren. Ich weiß nicht, ob das sinnvoll ist, aber so kann ich es mir im Kopf plausibel machen. Für so eine Siemens-Extrawurst gibt es wohl kaum akademische Literatur, wie man das sinnvoll auslegt. Aber es macht wohl Sinn, das PT2-System so zu wählen, dass es in etwa dem ohne Integrator geregelten Motor entspricht. Nur so "wartet" der I-Anteil eine sinnvolle Zeitspanne ab, bevor er eingreift. Das würde dann auch den von dir gewählten/gelesenen Begriff des "Referenzmodells" rechtfertigen: PT2 entspricht dem Verhalten des nicht stationär genauen Systems und sobald da eine Abweichung auftaucht, regelt der I-Anteil aus. Wie wär's denn, den I-Anteil erstmal abzuschalten (Tn = inf) und dann zu schauen, wie groß die Zeitkonstante dieser Regler-Strecke-Kombination in etwa ist. Besser noch: Rechnen als schauen. Währenddessen wird Kp sinnvoll nach Standardmethode gewählt (rechnen oder probieren). Dann kann man das PT2-Glied etwa so einstellen, dass die beiden Verhalten x_soll --> x_filter und x_soll --> x_ist in etwa identisch sind. Schlussendlich hast du nur den freien Parameter Tn. Mit etwas Glück kannst du damit das Überschwingen des ganzen Konstrukts steuern. Keine Ahnung, ob das jetzt so stimmt aber viel Glück beim Ausprobieren :)
Hallo Danke für die Antwort, das klingt ganz plausibel und passt auch zur Beschreibung, dass das Ref-Modell den P-geregelten Drehzahlkreis nachbilden soll. Ich werd mal drüber rechnen, welche Zeitkonstante da so rauskommen. mfg Edwin
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.