1 | #include <xc888.h>
|
2 | //Function declarations
|
3 | void port_init(void);
|
4 | void delay(int);
|
5 | void lcdinit(void);
|
6 | void writecmd(int);
|
7 | void writedata(char);
|
8 | void ReturnHome(void);
|
9 | void wait(unsigned int time);
|
10 | //*******************
|
11 | //Pin description
|
12 | /*
|
13 | P4.4 to P4.7 is data bus
|
14 | P4.0 is RS
|
15 | P4.1 is R/W
|
16 | P4.2 is E
|
17 | */
|
18 | //********************
|
19 | // Defines Pins
|
20 | sbit RS = 0xC9; // Command or Data
|
21 | sbit E = 0xCA; // Enable Port
|
22 | // R/W dauerhaft auf Masse
|
23 | // ***********************************************************
|
24 | // Main program
|
25 | //
|
26 | #define P4 P4_DATA
|
27 | void main(void)
|
28 | {
|
29 | port_init(); //Make all ports zero
|
30 | lcdinit(); //Initilize LCD
|
31 | writedata('H'); //write
|
32 | writedata('e'); //write
|
33 | writedata('l'); //write
|
34 | writedata('l'); //write
|
35 | writedata('o'); //write
|
36 | ReturnHome(); //Return to 0 position
|
37 | while(1)
|
38 | {;
|
39 | }
|
40 | }
|
41 | void lcdinit(void)
|
42 | {
|
43 | ///////////// Reset process from datasheet /////////
|
44 | wait(450);
|
45 |
|
46 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
47 | P4 |= (0x30&0xF0); // Write 0x3
|
48 |
|
49 | E = 1; // => E = 1
|
50 | delay(250);
|
51 |
|
52 | E = 0; // => E = 0
|
53 | delay(250);
|
54 |
|
55 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
56 | P4 |= (0x30&0xF0); // Write 0x3
|
57 |
|
58 | E = 1; // => E = 1
|
59 | delay(250);
|
60 |
|
61 | E = 0; // => E = 0
|
62 | delay(250);
|
63 | delay(300);
|
64 |
|
65 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
66 | P4 |= (0x30&0xF0); // Write 0x3
|
67 |
|
68 | E = 1; // => E = 1
|
69 | delay(250);
|
70 | E = 0; // => E = 0
|
71 | delay(250);
|
72 |
|
73 | delay(650);
|
74 |
|
75 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
76 | P4 |= (0x20&0xF0); // Write 0x2
|
77 |
|
78 | E = 1; // => E = 1
|
79 | delay(250);
|
80 | E = 0; // => E = 0
|
81 | delay(250);
|
82 | delay(650);
|
83 |
|
84 | /////////////////////////////////////////////////////
|
85 | wait (1);
|
86 | writecmd(0x28); //function set
|
87 | wait (1);
|
88 | writecmd(0x0c); //display on,cursor off,blink off
|
89 | wait (1);
|
90 | writecmd(0x01); //clear display
|
91 | wait (3);
|
92 | writecmd(0x06); //entry mode, set increment
|
93 | wait (30);
|
94 | }
|
95 |
|
96 | void port_init(void)
|
97 | {
|
98 | P4_DIR = 0xFF;
|
99 | PORT_PAGE=1;
|
100 | P4_PUDEN=0x00;
|
101 | P4_PUDSEL=0xFF;
|
102 | PORT_PAGE=0;
|
103 | }
|
104 |
|
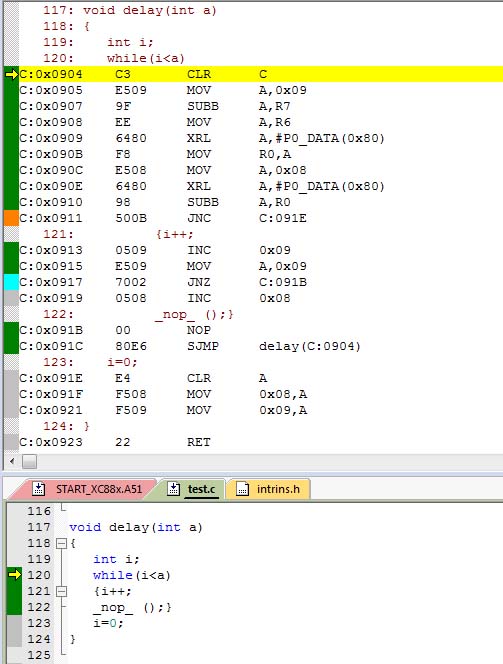
105 | void delay(int a)
|
106 | {
|
107 | int i;
|
108 | for(i=0;i<a;i++);
|
109 | i=0;
|
110 | }
|
111 |
|
112 | void writedata(char t)
|
113 | {
|
114 | RS = 1; // This is data
|
115 | delay(250);
|
116 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
117 | P4 |= (t&0xF0); // Write Upper nibble of data
|
118 |
|
119 | E = 1; // => E = 1
|
120 | delay(250);
|
121 |
|
122 | E = 0; // => E = 0
|
123 | delay(250);
|
124 |
|
125 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
126 | P4 |= ((t<<4)&0xF0);// Write Lower nibble of data
|
127 |
|
128 | E = 1; // => E = 1
|
129 | delay(250);
|
130 | E = 0; // => E = 0
|
131 | delay(250);
|
132 | }
|
133 |
|
134 | void writecmd(int z)
|
135 | {
|
136 | RS = 0; // This is command
|
137 |
|
138 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
139 | P4 |= (z&0xF0); // Write Upper nibble of data
|
140 |
|
141 | E = 1; // => E = 1
|
142 | delay(250);
|
143 |
|
144 | E = 0; // => E = 0
|
145 | delay(250);
|
146 |
|
147 |
|
148 | P4 &= 0x0F; // Make P2.4 to P2.7 zero
|
149 | P4 |= ((z<<4)&0xF0);// Write Lower nibble of data
|
150 |
|
151 | E = 1; // => E = 1
|
152 | delay(250);
|
153 |
|
154 | E = 0; // => E = 0
|
155 | delay(250);
|
156 | }
|
157 |
|
158 | void ReturnHome(void) //Return to 0 location
|
159 | {
|
160 | writecmd(0x02);
|
161 | delay(1500);
|
162 | }
|
163 |
|
164 | void wait(unsigned int time)
|
165 | {
|
166 | unsigned int zaehler = 0;
|
167 | TMOD = 1;
|
168 | TL0 = 0x50;
|
169 | TH0 = 0xFB;
|
170 | TCON = 0x10;
|
171 | while(time != zaehler)
|
172 | {
|
173 | if(TF0)
|
174 | {
|
175 | TF0=0;
|
176 | TL0=0x20;
|
177 | TH0=0xD1; //Reload Wert von 65536-12000 = 53536 => 0xD120 => 1ms timer (12000*83.33 = 999960ns)
|
178 | zaehler++;
|
179 | }
|
180 | }
|
181 |
|
182 | }
|