Hallöle, ich bin gerade am Planen, was für einen Motor ich denn für mein Projekt brauche. Nach etwas Verwirrung hoffe ich nun einigermaßen Verstanden zu haben, wie die Dinge zu berechnen sind. Ich hätte deshalb gern eine Bestätigung/Widerspruch, je nachdem ob das jetzt so stimmt oder nicht. Also ich erklär dann mal, wie ichs verstanden habe: Im Datenblatt finden sich verschiedene Drehmomente. Das Drehmoment is im allgemeinen Drehzahlabhängig und nimmt mit höherer Drehzahl (meist einigermaßen linear; oft gibts dazu einen Graph im Datenblatt) ab. Dabei gibt es speziell bei Schrittmotoren Resonanzfrequenzen bei denen das Drehmoment einbricht... Im Falle der Motor erst anläuft (Drehzahl = 0) liefert der Motor bei seiner "Rated Voltage" das angegebene Haltemoment (z.B. 0,38 Nm). Wenn man jetzt annimmt, dass das Drehmoment dem Haltemoment (Beispiel 0,38 Nm) entspricht und wir an den Rotor einen Hebel mit 1 Meter Länge montieren und an dessen Ende ein Gewicht von 1kg befestigen... dann würde dieses mit 0,38 m/s² beschleunigt. Wenn wir jetzt noch annehmen, dass für die erste Sekunde das Drehmoment so bleibt (und natürlich wird es absinken, aber das rechnet sich grad komplizierter), dann wäre die Geschwindigkeit des Gewichts (entlang der Kreisbahn) v = a * t = 0,38 (m/s²) * 1 s= 0,38 m/s. Wenn ich also nach 1 Sekunde eine Geschwindigkeit von 2 m/s erreichen will, brauche ich ein Haltemoment von über 2 Nm ... tendenziell eher 3-4 Nm... richtig? (also 1 kg, 1m Hebellänge) Ein erhöhen der Spannung (gegenüber der "Rated Voltage") würde mein Haltemoment/Drehmoment in etwa im gleichen Verhältnis erhöhen, ist aber durch die thermische Belastbarkeit des Motors begrenzt (wenige Sekunden 150% Rated Voltage ist bei einigen Motoren scheinbar ok). Und nun wird es besonders holperig mit dem Verständnis: Wenn ich jetzt anfange ein Getriebe mit fester Übersetzung (z.B. 1:3) benutze, erhöhe ich zwar die anfangs wirkende Kraft und kann damit z.B. eine stärkere Haftreibung überwinden. Aber die Geschwindigkeit (des Gewichts am Hebel), die ich innerhalb von 1 Sekunde erreichen kann (also die Beschleunigung), bleibt im Prinzip gleich, oder? Sprich: Ein Getriebe hilft mir tendenziell nicht, eine höhere Beschleunigung zu erreichen... Ist das so richtig? Grüße Stefan
stell dir Mal vor in deinem Motor hat jetzt jemand heimlich ein Getriebe eingebaut sodass Du das 3-fache Drehmoment bekommst, dann kannst Du doch die gleiche Betrachtung wie oben aufstellen ;-) wichtig ist, dass kein Perpetuum mobile rauskommt
@Walter: > stell dir Mal vor in deinem Motor hat jetzt jemand heimlich ein Getriebe > eingebaut sodass Du das 3-fache Drehmoment bekommst, Also vom Energieerhaltungssatz her haben wir ne Masse auf ne bestimmte Geschwindigkeit zu beschleunigen (= kintische Energie). Durch das Getriebe wird die Effizienz tendenziell schlechter (glaub irgendwo ~10% pro Übersetzungsstufe gelesen zu haben) und damit wird mit Getriebe die Geschwindigkeit der Masse nach 1 Sekunde mit dem Getriebe eher geringer sein. Allerdings könnte es sein, dass er Motor bei bestimmten Drehzahlen effizienter ist (z.B. wegen Haftreibung des Rotors, Vibrationen, mehr Rotationsenergie im Rotor => steigende nötige Kraft um den Rotor noch weiter zu beschleunigen). Wenn man also so will, könnte man auch über die Effizienz "nü" (abhängig von Drehzahl) und die in den Motor hineingesteckte Leistung gehen... Wenn man U maximal wählt (maximaler Strangstrom: U_max = I_max * R; R = Strangwiderstand) käme man auf P_in = I² * R als maximale Dauerlast. Wenn man jetzt kurzzeitig 150% nominalen Strangstrom verwenden dürfte, wäre das P_in(peak) = 2,25 * I_max² * R. Nehmen wir nü = 0.5 an (also 50% Effizienz), dann kämen wir auf P_out(peak) = 2,25 * I_max² R nü. P_out(peak) = 1,125 * I_max² * R Wenn wir jetzt t Sekunden lang diese Leistung wirken lassen, entspricht das einer Energie von: E = P_out(peak) * t Die in kinetische Energie umgewandelt wird. Also: E = P_out(peak) * t = m * v² Wenn wir jetzt mal t = 1s, I_max = 0.4A, R = 30 Ohm, m = 1kg annehmen, dann wären das: E = 1,125 * 1² A² / 30 Ohm * 1s = 0,0375 Ws v = Wurzel(0,0375 Ws / 1 kg) = ~0,194 m/s Wenn wir also nach dem Energieerhaltungssatz gehen, die Masse des Hebels als 0 kg und die Effizenz mal als Konstant annehmen, ist die Geschwindigkeit auf die der Motor 1 kg in 1 Sekunde beschleunigen kann immer gleich. D.h. egal, welches Übersetzungsverhältnis das (ideal wirkende) Getriebe hätte und egal wie lang der gewichtslose Hebel letztlich ist. Richtig so? > wichtig ist, dass kein Perpetuum mobile rauskommt Ja, stimmt! Immer aufpassen, dass wir das Universum nicht zerstören... schön an die physikalischen Gesetze halten. Oder schon vorher nen guten Anwalt besorgen...
Stefan K. schrieb: > Wenn wir jetzt mal t = 1s, I_max = 0.4A, R = 30 Ohm, m = 1kg annehmen, > dann wären das: > > E = 1,125 * 1² A² / 30 Ohm * 1s = 0,0375 Ws > v = Wurzel(0,0375 Ws / 1 kg) = ~0,194 m/s Ok, also Zahlen einsetzen und besonders das Rechnen müssen wir dann wohl noch mal üben... Also richtig wäre dann wohl: E = 1,125 x 0,4² A² x 30 Ohm x 1s = 5,4 Ws v = Wurzel(5,4 Ws / 1 kg) = ~2,32 m/s Die Peakleistung wäre dann auch 5,4 Watt und nicht nur 0,0375 Watt... das schien mir bei dem Strom 0,4 A und den so üblichen Spannungen von 12-24V für Schrittmotoren auch etwas wenig...
Stefan K. schrieb: > E = P_out(peak) * t = m * v² Ahja, jetzt bin ich grad noch über die korrekte Formel gestolpert beim Recherchieren, wie das mit dem Trägheitsmoment doch gleich war... Es gilt richtigerweise natürlich: E = 1/2 m v² Heißt also man könnte 2kg statt 1kg in einer Sekunde auf die berechnete Geschwindigkeit bringen... für die Geschwindigkeitsänderung gilt: Faktor ~1,41 (= Wurzel von 2) höher bei gleichem Gewicht (1 kg).
Für die Beschleunigung ist nicht das Drehmoment sondern die mechanische Leistung des Motors von Bedeutung. Die erhält man, in dem man das Drehmoment mit der Drehzahl multipliziert (O.K. das ist jetzt wieder das Moment drin). Wenn mann sich z.B. diese Kennlinie anschaut, dann folgt daraus, dass der Motor bei 200 U/min die maximale Leistung abgiebt und somit bei dieser Drehzahl die maximale Beschleunigung erreicht. http://www.igus.de/wpck/default.aspx?Pagename=N11_6_14_1_Schrittmotor_NEMA17&C=DE&L=de
Karl schrieb: > Für die Beschleunigung ist nicht das Drehmoment sondern die mechanische > Leistung des Motors von Bedeutung. Die erhält man, in dem man das > Drehmoment mit der Drehzahl multipliziert (O.K. das ist jetzt wieder das > Moment drin). Wenn mann sich z.B. diese Kennlinie anschaut, dann folgt > daraus, dass der Motor bei 200 U/min die maximale Leistung abgiebt und > somit bei dieser Drehzahl die maximale Beschleunigung erreicht. > > http://www.igus.de/wpck/default.aspx?Pagename=N11_6_14_1_Schrittmotor_NEMA17&C=DE&L=de Hm, ja.. das macht Sinn. Zumindest teilweise... die Formel scheint dabei aber zu sein:
mit M ... Drehmoment n ... Drehzahl Zumindest laut: http://de.wikipedia.org/wiki/Leistung_%28Physik%29#Mechanische_Leistung Sprich da fehlt wohl noch 2 PI in der Rechnung... aber das hab ich damals auch schon in der Schule gern vergessen. Das erklärt auch nochmal mathematisch, warum eine (ideale) Übersetzung nichts an der Beschleunigung ändert... denn die ändert nur das Verhältnis zwischen Drehzahl und Drehmoment, aber nicht dessen Produkt. Das heißt aber im Endeffekt, dass ich das was das Drehmoment ist, noch nicht richtig verstanden habe.... Mal nochmal (schriftlich) nachdenken: 1. Also die mechanische Leistung P (also das Produkt aus Drehmoment, Drehzahl und 2 PI) entspricht der Beschleunigung. Das ist die Energie, die pro Zeiteinheit übertragen wird. [Einheit: Watt = Joule pro Sekunde; Formelzeichen: P] 2. Die Energie... laut Wikipedia: Formelzeichen E; Einheit: Joule [J] = N * m ... also Newton * Meter 3. Also ist die Angabe in Nm ("Newton-Meter") eigentlich eine Energiemenge. Dann müsste das Drehmoment einer Energiemenge entsprechen... Für das Drehmoment M gilt aber zumindest mal M = r * F, also Drehmoment ist gleich Kraft (F) mal Länge des Hebelarms (r). Wobei dabei die Wirkrichtung der Kraft senkrecht zum Hebel angenommen wird... 4. Kraft (F) ist Masse (m) mal Beschleunigung (a)... also: F = m * a. Das Drehmoment M wäre also dann: M = r * F = r m a... also Masse (m) mal Beschleunigung (a) mal Länge des Hebelarms (r)... 5. Also entspricht das Drehmoment von 1 Nm z.B. der Beschleunigung von 1 m/s² eines Gewichts von 1kg an einem Hebelarm von 1 Meter Länge. Dafür ist eine genaue Energiemenge nötig... daher der Zugammenhang 1 J = 1 N*m. Ok, aber was ist dann das Haltemoment...? Es ist ein Moment, zumindest vom Namen und der Einheit her... Nach meiner Erkenntnis aus "5." hieße dies: Ein Haltemoment von 1 N*m entspricht der Beschleunigung von 1 m/s² eines Gewichts von 1kg an einem Hebelarm von 1 Meter Länge, wenn der Motor gerade steht und dann die Nominal-Energie (Nominal-Spannung / Nominal-Strom) zugeführt wird. So langsam wird's, glaube ich...
5. Also entspricht das Drehmoment von 1 Nm z.B. der Beschleunigung von 1 m/s² eines Gewichts von 1kg an einem Hebelarm von 1 Meter Länge. Dafür ist eine genaue Energiemenge nötig... daher der Zugammenhang 1 J = 1 N* Hä??? Siehs mal anders herum Wenn Du eine Schraube mit einem Drehmoment von 1Nm anziehen willst -> nimmst Du einen Hebel 1m lang und ziehst an dessen Ende mit 1N. 1N entspricht etwa 100g -> Du hängst ein Gewicht von 100g an einen Hebel von 1m Länge. Wenn Du einen Motor mit einem Haltemoment von 1Nm hast kann der an einem 1m langen Hebel ein Gewicht von 100g gerade noch halten (angenommen der Hebel steht in der Position dass das Gewicht senkrecht nach unten zieht) Wenn Du da dran ein Gewicht von 1Kg hängst hast Du ??? Einen Generator :)
@ Karl (Gast) >Für die Beschleunigung ist nicht das Drehmoment sondern die mechanische >Leistung des Motors von Bedeutung. Die erhält man, in dem man das Falsch. Denn Drehmoment ist sozusagen die Kraft, mit der etwas beschleunigt wird. >Drehmoment mit der Drehzahl multipliziert (O.K. das ist jetzt wieder das >Moment drin). Wenn mann sich z.B. diese Kennlinie anschaut, dann folgt eben. Leistung bildet sich u.a. aus Drehmoment und Drehzahl. Wüprde ich einfach die Leistung erhöhen, kann das auch bedeuten, daß ich die Drehzahl einfach erhöhe. Aber damit habe ich nicht automatisch eine höhere Beschleunigung. Die Beschleuinigung kann ich nur erhöhen, wenn ich das Drehmoment erhöhe. >daraus, dass der Motor bei 200 U/min die maximale Leistung abgiebt und >somit bei dieser Drehzahl die maximale Beschleunigung erreicht. Damit auch falsch. Ein Auto/Motorrad hat üblicherweise im Bereich der max. Endgeschwindigkeit die max. Leistung, aber mögliche Beschleunigung ist da so ziemlich null.
heinz schrieb: > Siehs mal anders herum > Wenn Du eine Schraube mit einem Drehmoment von 1Nm anziehen willst -> > nimmst Du einen Hebel 1m lang und ziehst an dessen Ende mit 1N. 1N > entspricht etwa 100g -> Du hängst ein Gewicht von 100g an einen Hebel > von 1m Länge. Ja, genau... etwa 100g Masse an einem Hebel von 1 Meter und zwar in der Waagerechten... und dann wirkt auf das Gewicht, wegen die Schwerkraft... also eine Beschleunigung von 9,81 m/s²... Kraft = Masse * Beschleunigung (0,1 kg * 9,81 m/s²) = 0,981 N. > Wenn Du einen Motor mit einem Haltemoment von 1Nm hast kann der an einem > 1m langen Hebel ein Gewicht von 100g gerade noch halten (angenommen der > Hebel steht in der Position dass das Gewicht senkrecht nach unten zieht) Korrekt, wenn der Hebel nicht mehr Waagerecht ist, gilt:
Stefan K. schrieb: > Ja, genau... > etwa 100g Masse an einem Hebel von 1 Meter und zwar in der > Waagerechten... > und dann wirkt auf das Gewicht, wegen die Schwerkraft... also eine > Beschleunigung von 9,81 m/s²... Kraft = Masse * Beschleunigung (0,1 kg * > 9,81 m/s²) = 0,981 N. Worauf ich hinaus wollte, ist: Es stecken Masse, Beschleunigung [entlang der Kreisbahn] (= Kraft) und die Hebellänge im Drehmoment drin. Natürlich kann man das auf Kraft und Hebellänge reduzieren... multiplizieren und kommt am Ende auf ein Drehmoment. Und falls mein Denkansatz etwas wirr erscheint... ich möchte bei meinem Projekt ein Objekt an einem Hebel bewegen. Das Objekt hat entsprechend eine max. Masse und der Hebel eine bekannte Länge und das Objekt soll in einer noch zu definierenden Zeitgrenze (z.B. weniger als 1 Sekunde) auf diese Geschwindigkeit beschleunigt und auf dieser Geschwindigkeit werden. Da die Geschwindigkeit bei < 2 m/s liegen soll, dürfte die Luftreibung hier noch keine große Rolle spielen. Eher noch die Haft- und die Gleitreibung des Lagers für den Hebel. Am Ende ist dann z.B. zu beantworten: Wie muss ich daher meinen Motor dimensionieren, damit er das auch schafft? Die Beschleunigungsphasen nehmen dabei tendenziell ca. 5% der Zeit ein, wodurch man hier wahrscheinlich von einer Peak-Belastung sprechen kann (also keine kontinuierliche Dauerlast). Der Motor hat also zwischendurch immer mal Zeit etwas abzukühlen. WICHTIG: Bevor mir das jetzt einer als Formel hinschreibt... das ist nicht das Ziel! Das Ziel ist, dass ich am Ende in der Lage bin, die Formel selbst hin zu schreiben... in vereinfachter Form dürfte ich jetzt in der Lage dazu sein. --> Hier auch noch einmal Danke dafür an alle die mitgeholfen haben... Wichtig war für mich auch, richtig zu verstehen, welche Komponenten hier wirklich hinein spielen... und mögliche Denkfehler zu beseitigen. Im Prinzip brauche ich hierfür am Ende das Trägheitsmoment des Hebels mit dem Objekt dran und eine Funktion der maximal erreichbaren Winkelbeschleunigung (Motorabhängig, in Abhängigkeit von der Drehzahl). Dann lässt sich berechnen, welche Zeit für die Beschleunigung auf eine bestimmte Geschwindigkeit mit dem entsprechenden Motor nötig ist. @Jens: >>daraus, dass der Motor bei 200 U/min die maximale Leistung abgiebt und >>somit bei dieser Drehzahl die maximale Beschleunigung erreicht. > >Damit auch falsch. >Ein Auto/Motorrad hat üblicherweise im Bereich der max. >Endgeschwindigkeit die max. Leistung, aber mögliche Beschleunigung ist >da so ziemlich null. Das hab ich dann leider nicht verstanden. Kannst Du das vielleicht noch mal anders/ausführlicher erklären? Danke! Grüße, Stefan
Angehängte Dateien:
-

Unbenannt.PNG
6,6 KB -

Unbenannt2.PNG
5 KB

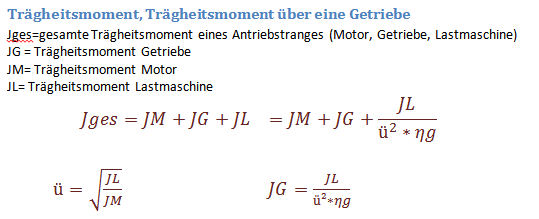
Ich habe dir zwei Abbildungen von meiner Formelsammlung angehängt,da wir viel mit Antriebstechnik gerechnet haben. Um dein Ziel zu erreichen, muss man etwas grundlegendes wissen: Es gibt einmal statischen Drehmoment (M= F*r= P/(2phi*n)), und dynamischen Drehmoment s.Anhang. Statischen Drehmoment brauchst du um eine Masse z.B. 10kg mit vorgegebener Drehzahl bewegen zu können. Das kannst du ja wunderbar aus der Gleichungen ausrechnen,und die Leistung von dem Motor bestimmen. Dynamischen Drehmoment braucht man während der Beschleunigung, wenn die 10kg langsam beschleunigt werden braucht man wenig Drehmoment/zusätzlicher Leistung, wenn schnell braucht man mehr. Wenn diese Leistung/Drehmoment nicht vom Motor abgegeben werden bleibt deine Masse stehen, obwohl nach statischen Drehmoment genug ausgerechnet worden ist. Problem beim Ausrechnen des dynamischen Drehmomentes wird die Trägheit sein, sie wird experimentell für jede Maschine bzw. Antriebsstrang bestimmt.
In der Praxis wird z.B. für die Asynchronmotoren ein Freqenzumrichter davor geschaltet wo man über die Anfahrtsrampe(Frequenz ändert sich z.B. von 10Hz bis 50Hz in eine vorgegebene Zeit) also über die Zeit die dynamische Leistung klein hält.
Sowas wie dynamisches - statisches Drehmoment gibts nicht. Wenn Du einen Motor hast und dessen Drehmomentkurve dann brauchst Du wie schon oben geschrieben das Trägheitsmoment deiner Last. Das KANN experimentel ermittelt werden - wird aber üblicherweise gerechnet. http://de.wikipedia.org/wiki/Tr%C3%A4gheitsmoment bzw. dein CAD bestimmt (berechnet) das für Dich. Jetzt kennst Du dein Lastmoment (Gewicht nach unten) Motormoment - Lastmoment = das was übrig bleibt zum Beschleunigen. Mb = Trägheitsmoment * dOmega / dZeit Mb hast Du
heinz schrieb: > Wenn Du einen Motor hast und dessen Drehmomentkurve dann brauchst Du wie > schon oben geschrieben das Trägheitsmoment deiner Last. Das KANN > experimentel ermittelt werden - wird aber üblicherweise gerechnet. > > http://de.wikipedia.org/wiki/Tr%C3%A4gheitsmoment > > bzw. dein CAD bestimmt (berechnet) das für Dich. Also ich habs bereits berechnet. Da meine Form nicht in der Tabelle dabei war, hab ich mir nen kleines Programm dafür geschrieben, um die Trägheit des Hebels zu berechnen. Auf Integration hatte ich grad keine Lust, hab den Hebel einfach in kleine Scheibchen geschnitten... das Gewicht pro laufenden Meter des Materials hab ich gefunden und dann jeweils Scheibchenbreite[m] * Gewicht pro Meter [kg/m] gerechnet und dann halt mit dem quadierten (r [in m])² multipliziert und das ganze dann für alle Scheibchen aufsummiert. Am Ende hängt dann ein variables Gewicht. Da ich nur nur eine Untergrenze für die Motorleistung brauche, kann man dieses Gewicht, dessen Form sowieso nicht so genau bekannt ist, einfach als Punktmasse annehmen. Notfalls gibt man über dessen maximale Ausmaße noch mal etwas mehr Radius für die Punktmasse drauf... Frage 1: Ist das Trägheitsmoment des Motors nicht schon in den Daten des Motor-Datenblattes "herausgerechnet". Ich meine hier die Kurve für das Drehmoment bei einer bestimmten Drehzahl bei Nominalspannung. Das dort angegebene Drehmoment ist doch das was ich letztlich "nutzen" kann, oder? Das Trägheitsmoment des Rotors wird doch erst dann interessant, wenn ich ein "Nachlaufen" ohne Energiezufuhr oder ähnliches berechnen wöllte. Letztlich reduziert sich die Berechnung auf die Betrachtung, dass ich einfach eine bestimmte Rotationsenergie im "System" (Rotor des Motors, Hebelarm, Last am Ende, ... und allen anderen Bewegten Teilen) habe. Der Motor liefert dann dieser Energie gegenüber eine positiv oder negative Leistung für eine bestimmte Dauer, was dem hinzuführen oder entfernen weiterer Energie entspricht. Zusätzlich wirken Reibungskräfte (Haftreibung, Gleitreibung und Luftwiderstand), welche vom Betrag Energie im System abhängig sind und der aktuellen Bewegungsrichtung entgegen wirken. Frage 2: Die Wirkung eines Getriebes ist doch eigentlich nur, die Kurve des abgegebenen Drehmoments linear zu stauchen oder auseinander zu ziehen (je nach Über/Untersetzung), oder? Bei ner 1:100 Übersetzung gilt dann bei einer Ausgabedrehzahl von 1 U/min einfach das Drehmoment von 100 U/min der Kurve im Datenblatt multipliziert mit der Effektivität des Getriebes. Daher überlege ich, ob/wann mir ein Getriebe etwas bringt. Es bringt mir doch eigentlich nur dann Vorteile, wenn: 1. ich energiesparend Arbeiten will und deshalb den Motor in seinem optimal-Drehzahlbereich bewegen will. 2. wenn das Drehmoment des Motors bei der Drehzahl, die ich ganz am Ende benötige, schon zu Stark einbricht. Das Drehmoment beim Elektromotor, ist ja bei niedrigen Drehzahlen höher, oder? Ich mein... ein wenig unsicher bin ich da schon. Denn in den Datenblättern fängt die Drehmoment-Kurve nicht bei Drehzahlen von 0 an, sondern z.B. 100. Was da bei Drehzahlen von 0-100 passiert kann ich nur erraten... Wenn das Drehmoment auch dort sehr niedrig sein kann, wäre auch folgender Einsatz eines Getriebes denkbar: 3. wenn das Drehmoment im niedrigen Drehzahlbereich zu gering ist, um die Haftreibung zu überwinden und zum Bereich der höheren Drehzahlen zu gelangen. Die letzte Variante habe ich bisher immer ausgeschlossen. Ich bin davon ausgegangen, dass die Leistung bei Drehzahl 0 maximal ist und mit der Drehzahl dann abnimmt.... D.h. das Fazit war für mich: der Motor schaffts von der Leistung alles ohne Getriebe anzulaufen zu lassen oder er schaffts einfach von der Leistung nicht.
Das Trägheitsmoment des Motorrotors mußt Du beachten - der muss
schliesslich auch beschleunigt werden.
Das Getriebe wird so ausgelegt daß bei max. Motordrehzahl deine
gewünschte Lastdrehzahl erreicht wird (+ Sicherheit). Damit bekommst Du
den kleinst möglichen Motor.
Die Leistung im idealen System (keine Verluste) ist überall gleich.
Drehzahl und Drehmoment sind umgekehrt proportional.
Wenn Du ein Getriebe verwendest ändert sich das Trägheitsmoment der Last
(vom Motor her gesehen) Schau mal unter "reduziertes Trägheitsmoment".
> Ich bin davon ausgegangen, dass die Leistung bei Drehzahl 0 maximal...."
P = M * n
n=0 -> P=0
heinz schrieb: > P = M * n > n=0 -> P=0 Ok, aber wiese läuft ein Motor dann an? Muss man den eigentlich anschubsen, aber glücklicherweise reicht dafür der leichte Luftzug, der immer vorhanden ist? Dass die Leistung sehr klein ist, passt in mein Verständnis hinein, aber eine Leistung von Null erscheint mir merkwürdig...
:) Du hast aber ein Drehmoment und wenn das grösser ist als das Lastmoment fängt er an zu drehen. Fakt ist P=M*n und wenn n=0 folgt P=0 Heb mal eine Stunde lang 1Kg mit waagerecht ausgestrecktem Arm. Wieviel Arbeit hast Du erbracht? Null - weil Arbeit ist gleich Weg * Kraft Wieviel Leistung hast Du erbracht? Null - weil Leistung ist Arbeit pro Zeit Dass Dir der Arm weh tut ist was anderes. Du hast in dem Fall halt einen besch** Wirkungsgrad
heinz schrieb: > P = M * n Wenn schon, dann bitte richtig. Die Leistung eines Rotationssystems um eine seiner Hauptträgheitsachsen berechnet sich zu P = M * omega
Stefan K. schrieb: > Frage 1: Ist das Trägheitsmoment des Motors nicht schon in den Daten des > Motor-Datenblattes "herausgerechnet". Ich meine hier die Kurve für das > Drehmoment bei einer bestimmten Drehzahl bei Nominalspannung. Das dort > angegebene Drehmoment ist doch das was ich letztlich "nutzen" kann, > oder? Du kannst dir diese Frage durch das folgende Gedankenmodel selbst beantworten. Ein Linearantrieb erzeugt laut Datenblatt eine bestimmte Antriebskraft bei einer festgelegten Geschwindigkeit. Wie verhält sich dieser Antrieb wenn er 1. keine externe Masse mitbewegen muss? 2. eine kleine Masse mitbewegen muss? 3. eine sehr sehr große Masse bewegen soll?
P = M * n
mit M in Nm
n in Umdrehungen /6.2827225130890052356020942408377 Millisekunden
P in Watt
alles nur eine Frage der Einheiten
heinz schrieb: > alles nur eine Frage der Einheiten Du darfst das selbstverständlich handhaben wie du möchtest. Damit wird es jedoch weder physikalisch noch mathematisch korrekt. Die Drehzahl n definiert die Anzahl der Umdrehungen bezüglich einer Zeiteinheit also z.B. 1 Umdrehung pro Sekunde oder 60 Umdrehungen pro Minute. Die Winkelgeschwindigkeit gibt an, wie schnell sich ein Winkel mit der Zeit ändert. Nur weil beide die Einheit 1/s haben, ist es noch nicht die gleiche physikalische Größe! Frequenz und Kreisfrequenz haben auch beide die Einheit 1/s und doch haben beide eine unterschiedliche Bedeutung. Die Leistung bleibt also P = M * omega Es gibt jedoch den Zusammenhang zwischen der Drehzahl und der Winkelgeschwindigkeit. omega = 2*pi*n. Damit hättest du nicht eine Zahl mit 20 Nachkommastellen aufschreiben müssen, sondern nur 2*pi ;-)
Die hab ich nicht geschrieben sondern kopiert :) Näturlich ist das annähernd richtig. Kannst Du gern nachrechen. Lass die Haarspalterei, ich wollte Stefam nur zeigen dass bei Drehzahl = 0 die Leistung zu Null wird.
Joe G. schrieb: > heinz schrieb: >> P = M * n > > Wenn schon, dann bitte richtig. > Die Leistung eines Rotationssystems um eine seiner Hauptträgheitsachsen > berechnet sich zu P = M * omega Stimmt, da fehlt mal wieder was... Aber, im Prinzip gilt auch:
wegen:
Nur fehlte halt 2*pi ... das vergisst man irgendwie gern ;-) Die Schlussfolgerung ändert das aber dann nicht: Wenn n = 0 oder M = 0, dann ist auch P = 0. Die Erklärung mit dem "halten" des Gewichts (nur am Platz halten) hat mir schon mal "etwas" weitergeholfen. Allerdings passt mir das in meine Herangehensweise nach dem Energieerhaltungssatz nicht hinein. 1. Die Abgabeleistung ist doch Energie pro Zeit. Wenn die aber 0 ist, dann gebe ich an mein rotierendes System auch keine Energie ab. D.h. die Energie bleibt auch nach einer unendlich langen Zeit 0 Joule. Das entspricht dann einer Drehzahl, die bei 0 U/min bleibt. 2. Das Drehmoment ist im Stillstand größer als 0. Das Drehmoment hat aber beim Elektromotor beim Stillstand den höchsten Wert, oder? 3. Wenn dieses nun größer als das Lastmoment ist, fließt also Energie in mein System. Demnach wird auch eine Leistung erbracht, die größer als 0 Joule ist. Wieso ist dann die MOTOR-Leistung rechnerisch 0 Joule, wenn das System still steht? Kann es sein dass die Leistung irgendwie zeitlich "hinterher" hängt (d.h. den Zeitraum t-dt bis t betrachtet, also t = aktueller Zeitpunkt und dt ist ein unendlich kleiner Zeitraum)? @Joe ---- YEAH! Hausaufgaben... lol >> Du kannst dir diese Frage durch das folgende Gedankenmodel selbst >> beantworten. Ein Linearantrieb erzeugt laut Datenblatt eine bestimmte >> Antriebskraft bei einer festgelegten Geschwindigkeit. >> Wie verhält sich dieser Antrieb wenn er >> 1. keine externe Masse mitbewegen muss? Er beschleunigt (bei Nominalspannung, ggf. maximalen Nominalstrom) mit dem angegebenen Drehmoment für die jeweilige Drehzahl der Kurve, bis das Drehmoment für die Drehzahl 0 ergibt. >> 2. eine kleine Masse mitbewegen muss? Ersteinmal müssen wir (Anhand weiterer Informationen: Form der Masse, Länge des Hebels) das Trägheitsmoment J berechnen. Die kleine Masse entspricht einem "kleinen" Lastmoment. Je nach Hebellänge an dem die Masse befestigt ist (Annahme: Punktmasse); Ein bestimmtes, festgelegtes Trägheitsmoment J halt. Es gilt folgender Zusammenhang zwischen Winkelbeschleunigung, Trägheitsmoment und Drehmoment:
wobei alpha die Winkelbeschleunigung ist und M das Drehmoment des Motors bei gegebener Drehzahl (bzw. Winkelgeschwindigkeit). Umgestellt nach alpha ergibt sich:
D.h. die Winkelbeschleunigung alpha verhält sich bei gleichem,
zugeführten Drehmoment antiproportional zum Trägheitsmoment J.
Wenn also das Drehmoment > 0 ist, ist auch immer die
Winkelbeschleunigung > 0. Jedoch je nach Größe des Trägheitsmoment
entsprechend "kleiner".
In einem realen System haben wir zusätzlich eine Haftreibungskraft oder
bei Rotation entsprechend ein Haftreibungsmoment.
Wenn das Drehmoment kleiner oder gleich dem Haftreibungsmoment ist, so
bleibt das System im Stillstand. Erst wenn das Drehmoment größer als das
Haftreibungsmoment wird, fängt es an, sich zu bewegen.
>> 3. eine sehr sehr große Masse bewegen soll?
Das Verhalten ist identisch mit der Beschreibung bei 2. Wenn man nur
die "Masse" erhöht und den Rest beibehält. Beschleunigt das System
entsprechend langsamer.
heinz schrieb: > Lass die Haarspalterei, Seit wann ist die korrekte Anwendung der Mathematik und der Physik Haarspalterei? heinz schrieb: > Näturlich ist das annähernd richtig. Kannst Du gern nachrechen. Nicht mal annähernd richtig! Die korrekte Anwendung der Mathematik ergibt P = M*2*pi*n und nicht P = M*n / (2*pi) wie du geschrieben hast. Sogar wenn man die Haarspalterei weg lässt, kommen absolut andere Ergebnisse raus.
heinz schrieb: > Lass die Haarspalterei, ich wollte Stefam nur zeigen dass bei Drehzahl = > 0 die Leistung zu Null wird. Ja, also Haarspalten ist zwar eine meiner Lieblingsbeschäftigungen, aber bringt uns glaub nicht weiter. Trotzdem war's gut, hier nochmal drauf hin zu weisen, dass da ein 2*PI in die Formel rein muss... insbesondere, falls ein "Unwissender" hier irgendwann nachließt und dann anfängt mit der falschen Formel Leistungs-Berechnungen anzustellen. Blöderweise würde er dann eine um rund Faktor 6,3 zu kleine Leistung errechnen... und das wollen wir ja nicht ;-) ...trotzdem erklärt mir das alles noch nicht, warum die Leistung 0 ist, wenn doch die (Winkel-)beschleunigung im selben Moment größer 0 ist.
Stefan K. schrieb: > 3. Wenn dieses nun größer als das Lastmoment ist, fließt also Energie in > mein System. Demnach wird auch eine Leistung erbracht, die größer als 0 > Joule ist. Wieso ist dann die MOTOR-Leistung rechnerisch 0 Joule, wenn > das System still steht? Kann es sein dass die Leistung irgendwie > zeitlich "hinterher" hängt (d.h. den Zeitraum t-dt bis t betrachtet, > also t = aktueller Zeitpunkt und dt ist ein unendlich kleiner Zeitraum)? Du musst zwei Dinge trennen, die elektrische und die mechanische Seite des Motors. Die mechanische Motorleistung berechnet sich aus der Differenz der Energieströme die in den mechanischen Teil rein fließen und wieder raus fließen. Da sich der Energiestrom aus IE=M*omega berechnet (nicht zu verwechseln mit der Leistung!) und sowohl die Drehzahl der Welle als auch die Drehzahl des Motors selber Null ist, ist die mechanische Leistung Null. Die elektrische Leistung erzeugt am festgebremsten Motor nur ein Drehmoment (das Blockiermoment). Da sich der Wirkungsgrad aus dem Quotienten von Ausgangsleistung durch Eingangsleistung berechnet, ist der Gesamtwirkungsgrad Null.
Stefan K. schrieb: > ...trotzdem erklärt mir das alles noch nicht, warum die Leistung 0 ist, > wenn doch die (Winkel-)beschleunigung im selben Moment größer 0 ist. Du bringst zwei Sachverhalte durcheinander. Das Produkt aus dem Massenträgheitsmoment und der Winkelbeschleunigung dieser Masse ist ein Moment, nennen wir es „dynamisches“ Moment. Das Kreuzprodukt aus einer statischen Kraft an einem Hebelarm ist auch ein Moment, nennen wir es „statisches“ Moment. Beide haben zunächst nichts miteinander zu tun. Es sind zwei absolut unterschiedliche physikalische Sachverhalte. Im Motor werden nun diese beiden Momente „gekoppelt“. Das statische Moment welches sich aus der Lorenzkraft und dem Radius der Leiterschleife ergibt, steht im Gleichgewicht mit dem dynamischen Moment des Motors. Beides exakt aufgeschrieben, ergibt eine inhomogene Dgl. für den Motor. Halte ich den Motor nun fest, also phi oder alpha gleich Null, bleibt nur das statische Moment übrig.
> ...trotzdem erklärt mir das alles noch nicht, warum die Leistung 0 ist, wenn doch die (Winkel-)beschleunigung im selben Moment größer 0 ist. wieso ist die > 0 ? @Joe > P = M*2*pi*n und nicht P = M*n / (2*pi) wie du geschrieben hast. das hab ich nicht geschrieben
Joe G. schrieb: >> Die mechanische Motorleistung berechnet sich aus der Differenz der >> Energieströme die in den mechanischen Teil rein fließen und wieder raus >> fließen. Ok, also mit "Energieströmen" im elektrischen Sinne habe ich bisher nicht gerechnet... Ist das vergleichbar mit dem elektrischen Strom (Ladung pro Zeit)? Die Leistung ist ja "Energie pro Zeit" (Watt bzw. Joule pro Sekunde)? Wenn dem so ist... was entspricht dann: a) der Spannung in der Mechanik? -- Die elastische Verformung? (z.B. die das Verdrehen einer der Achse? Die Spannung in einer Feder?) b) dem mechanischen Widerstand? ... Die Reibungskräfte entsprechen wohl dem elektrischen Widerstand... während das Trägheitsmoment eher hier dem Scheinwiderstand eines Kondensators entsprechen dürfte? Die andere Erklärung habe ich leider nicht verstanden... Vielleicht schaffen wir's aber mit dieser Analogie.
heinz schrieb: >> ...trotzdem erklärt mir das alles noch nicht, warum die Leistung 0 ist, > wenn doch die (Winkel-)beschleunigung im selben Moment größer 0 ist. > > wieso ist die > 0 ? > Naja, die Überlegung ist: (Winkel-)Beschleunigung muss ja größer 0 sein, sonst würde sich die (Winkel-)Geschwindigkeit nicht erhöhen... und damit müsste das System im Stillstand verbleiben.
Stefan K. schrieb: > Ok, also mit "Energieströmen" im elektrischen Sinne habe ich bisher > nicht gerechnet... Der Energiestrom ist kein elektrisches Analogon, sondern einfach eine physikalische Größe. Er berechnet sich immer aus dem Produkt der Flussgröße und dem zugehörigen Potential, mechanisch also Drehmoment mal Drehzahl. Stefan K. schrieb: > Wenn dem so ist... was entspricht dann: > a) der Spannung in der Mechanik? -- Die elastische Verformung? (z.B. > die das Verdrehen einer der Achse? Die Spannung in einer Feder?) > b) dem mechanischen Widerstand? ... Die Reibungskräfte entsprechen wohl > dem elektrischen Widerstand... während das Trägheitsmoment eher hier dem > Scheinwiderstand eines Kondensators entsprechen dürfte? Wenn du eine Analogie benutzen möchtest, bitte nicht Raumgrößen mit Punktgrößen mischen. Also entweder die folgende Analogie el. Spannung = Geschwindigkeit el. Ladung = Impuls el. Strom = Kraft mag. Fluss = Weg oder halt die zugehörigen Feldgrößen also el. Feldstärke = Dehnungsgeschwindigkeit el. Stromdichte = Flächenkraft el. Verschiebestrom = Impuls pro Fläche Damit du jedoch nicht als Quotient die Naturkonstanten ermittelst, ist die Analogie der Punktgrößen einfacher. In Bauelementeform also: Massenträgsmoment = Kapazität Torsionsnachgiebigkeit = Induktivität stokescher Reibfaktor = Leitwert.
Joe G. schrieb: > Die elektrische Leistung erzeugt am festgebremsten Motor nur ein > Drehmoment (das Blockiermoment). Da sich der Wirkungsgrad aus dem > Quotienten von Ausgangsleistung durch Eingangsleistung berechnet, ist > der Gesamtwirkungsgrad Null. Also bei n = 0 (bzw. omega = 0) ist der Wirkungsgrad = 0. Ja, soweit komm ich mit. Zu diesem Zeitpunkt stecke ich Energie/Leistung rein (Drehmoment > 0), bekomme aber keine Energie/Leistung (Geschwindigkeit = 0, Energie im System = 0) heraus. Dann wäre ich wieder bei meiner Theorie der (sehr kleinen?) zeitlichen Verzögerung (sowas wie "Reaktionszeit") der reingesteckten Leistung zur wirksamen Leistung...
Stefan K. schrieb: > Dann wäre ich wieder bei meiner Theorie der (sehr kleinen?) zeitlichen > Verzögerung (sowas wie "Reaktionszeit") der reingesteckten Leistung zur > wirksamen Leistung... Wo sollte diese Zeit herkommen? Auf der elektrischen Seite fließt ein Energiestrom in den Motor rein und auch wieder raus. Die Differenz ist die elektrische Leistung die unmittelbar in magnetische und thermische Leistung gewandelt wird. Da auf der mechanischen Seite ein Kurzschluss herrscht (Drehzahl gleich Null), wird keine magnetische Leistung in mechanische Leistung gewandelt. Es entstehen also ausschließlich dissipative (thermische) Verluste. Ohmsche Verluste im elektrischen Leiter, Streufeldverluste im magnetischen System. Dieser Prozess passiert unmittelbar, es gibt also keine zeitliche Verzögerung dabei. Verzögerungen können nur entstehen, wenn Energiespeicher geladen oder entladen werden, also der Aufbau einer magnetischen Feldstärke im Flusskreis oder das Anlaufen des Rotors.
@Joe
> Wo sollte diese Zeit herkommen?
Haja, wenn ich den Lichtschalter anschalte, sieht es zwar so aus, als ob
das Licht sofort an ist, aber in Wirklichkeit dauert es z.B. 3 m
(Leiterlänge [m]) / 299792458 m/s (Lichtgeschwindigkeit [m/s]) = ~10 ns
bis das Lampe -anfängt- zu Leuchten. Sonst könnte man Informationen über
einen elektrischen Leiter schneller als Lichtgeschwindigkeit übertragen.
Daher meine Überlegung, dass da vielleicht irgendwo eine Verzögerung
drin steckt...
Ok, aber ich hab mich derweil mal auf anderen Webseiten etwas belesen...
und meine jetzt zu wissen, was du mit dem Unterschied zwischen
elektrischer und mechanischer Leistung meinst:
Wir haben bei einem Motor einmal die elektrische Seite:
und die mechanische Seite:
bzw.
Das Verhältnis zwischen P_{mech} zu P_{el} ist in unserer
Betrachtungsweise die Effizienz des Motors.
Dann hätten wir noch den Zusammenhang zwischen Winkelgeschwindigkeit und
Urspannung (durch die Generatorwirkung des Motors):
und dann den Zusammenhang zum Stromfluss im Motor:
Im Ruhezustand, ist U_emk = 0. Wenn man die Spannung U und den Widerstand als konstant annimmt, ist die Stromstärke demnach beim Stillstand des Motors am höchsten. Bei entsprechend sehr hoher Drehzahl kann die Stromstärke allerdings vom Betrag her höher als im Stillstand sein, fließt dann aber in negativer Richtung. Wenn ich das jetzt richtig verstanden habe, ist das jetzt so: Wenn ich am Motor eine Spannung anlege, die höher ist die Urspannung (U_emk), dann fließt ein Strom in positive Richtung und ich beschleunige damit den Rotor (bzw. mein mechanisches System). Lege ich eine kleinere Spannung an, oder schließe ich den Motor kurz fließt ein Strom in Gegenrichtung und ich entziehe dem mechanischen System Energie. Sehen wir uns mal "Performance Chart Simulation" an, die es bei manchen Herstellern von Elektromotoren gibt: http://www.mabuchi-motor.co.jp/en_US/product/elsim.html?RS-540SH-7520/23400/2.40/70.0/196/4.8/7.2/7.2/0.0019/0.0039/0.0019/%28CCW+%29 Da findet man folgende Zusammenhänge: Es berechnen sich eigentlich alle Werte in den Kennlinien aus Leerlaufdrehzahl (N0), Leerlaufstrom (I0), Blockierstrom (Is), Blockiermoment (Ts), und Eingangsspannung (V). Die Werte finden sich auch in der URL wieder. Die Werte 0.0019, 0.0039 und 0.0019 in der URL konnte ich nicht direkt zuordnen. Ich vermute dabei handelt es sich unter anderem um den Temperaturkoeffzenten. Für den Beispielmotor gilt: N0 = 23400 U/min => 390 U/s I0 = 2,4 A Is = 70 A Ts = 196 mNm => 0,196 Nm U = 7,2 V Daraus errechnet sich der Koeffizient ki für das Drehmoment:
Für den Strom gilt (laut Simulator):
Für das Drehmoment gilt:
Für die Ein- und die Ausgangsleistung:
Die Effizienz ist entsprechend:
Ich habe das mal "nachprogrammiert" und verglichen. Die Formeln dürften mit denen im Simulator übereinstimmen... und die Motorenhersteller sollten da ja eigentlich keine Fehler drinnen haben. Was mich gerade noch daran wundert ist, dass wenn das Drehmoment 0 ist, der Strom trotzdem 2.4 A ist. Zumindest scheint das (also 2,4 A * 7,2 V = 17,28 W) mal die Leistung zu sein, die nötig ist, damit der Motor nicht wieder langsamer wird. Da das Drehmoment dort 0 ist, ist dort auch die Effizienz 0, das erscheint logisch. Eine andere Sache, die mich wundert, ist: Warum nimmt das Drehmoment "nur" linear mit der Drehzahl ab? Die Rotationsenergie nimmt doch quadratisch mit der Winkelgeschwindigkeit zu? Oder wird das Trägheitsmoment des Rotors bei dieser "Simulation" einfach mal vernachlässigt? Bei welchem Problem waren wir eigentlich überhaupt? Achja: 1. Wenn die Drehzahl 0 ist... dann ist auch die Leistung (P_aus) 0 und damit auch die Effizienz 0. 2. Trotzdem ist das Drehmoment > 0 (genauer: maximal für diese Spannung). >> Im Motor werden nun diese beiden Momente „gekoppelt“. Das statische >> Moment welches sich aus der Lorenzkraft und dem Radius der >> Leiterschleife ergibt, steht im Gleichgewicht mit dem dynamischen >> Moment des Motors. Beides exakt aufgeschrieben, ergibt eine inhomogene >> Dgl. für den Motor. Halte ich den Motor nun fest, also phi oder alpha >> gleich Null, bleibt nur das statische Moment übrig. Ist mit dieser Differenzialgleichung etwas wie diese Gleichungen (von oben) gemeint:
Zumindest scheint das die Kopplung in die eine Richtung zu sein... sprich: Wie beeinflusst die mechanische Seite des Motors/Generators in Abhängigkeit von der Drehzahl die elektrische Seite (sprich: induzierte Spannung und damit geänderte Stromstärke/-richtung, abhängig vom Strangwiderstand)? Wahrscheinlich lassen sich diese Formeln auch in die andere Richtung umstellen...
Langsam wird es doch… Unterscheide beim Motor drei Abstraktionsstufen. 1. idealer Motor statisch (Wirkungsgrad 1, ohne dynamische Energiespeicher) 2. idealer Motor dynamisch (mit Energiespeichern, Massenträgheitsmoment, Induktivität) 3. realer Motor, dynamisch und verlustbehaftet Je nach Modell bekommst du unterschiedliche Ergebnisse. Modell 1: Uemk = k1*omega M = k2*I k2=k2 (Onsagersches Reziprozitätstheorem) Modell 2: Dgl. zweiter Ordnung ohne Reibung und ohne elektrischen Widerstand Modell 3: reales System Stefan K. schrieb: > Bei entsprechend sehr hoher Drehzahl > kann die Stromstärke allerdings vom Betrag her höher als im Stillstand > sein, fließt dann aber in negativer Richtung. korrekt Stefan K. schrieb: > Wenn ich das jetzt richtig verstanden habe, ist das jetzt so: Wenn ich > am Motor eine Spannung anlege, die höher ist die Urspannung (U_emk), > dann fließt ein Strom in positive Richtung und ich beschleunige damit > den Rotor (bzw. mein mechanisches System). korrekt Stefan K. schrieb: > Lege ich eine kleinere > Spannung an, oder schließe ich den Motor kurz fließt ein Strom in > Gegenrichtung und ich entziehe dem mechanischen System Energie. Nein. Schließe ich den Motor mechanisch kurz, fließt nur ein elektrischer Strom. Die Energie des mechanischen Systems ist Null, da die Winkelgeschwindigkeit des Rotors Null ist. Stefan K. schrieb: > Was mich gerade noch daran wundert ist, dass wenn das Drehmoment 0 ist, > der Strom trotzdem 2.4 A ist. Das kann nicht sein, da M = k2*I ist. Da k2 ungleich Null ist, muss I=0 sein Stefan K. schrieb: > Eine andere Sache, die mich wundert, ist: Warum nimmt das Drehmoment > "nur" linear mit der Drehzahl ab? Das hängt mit den physikalischen Wandlerprinzipien zusammen. Wandlerprinzipien die auf Feldgrenzflächeneffekten beruhen sind quadratisch (z.B. Reluktanzwandler) Wandlerprinzipen die auf Volumeneffekten basieren (Lorentzkraft) sind linear.
Stefan K. schrieb: > Ist mit dieser Differenzialgleichung etwas wie diese Gleichungen (von > oben) gemeint: Nein. Anbei die Herleitung der Dgl. bzw. des Motormodells als PDF bzw. hier als Pencast zum ansehen und anhören. Ich erkläre beim Schreiben noch etwas dazu ;-) http://www.livescribe.com/cgi-bin/WebObjects/LDApp.woa/wa/MLSOverviewPage?sid=R8l1RPM4Ww5g
Joe G. schrieb: > Stefan K. schrieb: >> Lege ich eine kleinere >> Spannung an, oder schließe ich den Motor kurz fließt ein Strom in >> Gegenrichtung und ich entziehe dem mechanischen System Energie. > > Nein. Schließe ich den Motor mechanisch kurz, fließt nur ein > elektrischer Strom. Die Energie des mechanischen Systems ist Null, da > die Winkelgeschwindigkeit des Rotors Null ist. Also die Idee war: Ich habe ein in Bewegung befindliches mechanisches System (also mit ordentlich Energie drin). Und der Motor ist im "Generatorbetrieb", d.h. ich schließe einen Widerstand an den Motor an ... oder gleich eine Drahtbrücke (= Kurzschluss). Damit müsste ein ordentlich hoher Strom in Gegenrichtung fließen und (solange die Windungen des Motors das abhalten) das System abgebremst werden und zum Stillstand kommen. Wenn natürlich der Motor (bzw. das gesamte System) im Stillstand ist, kann ich den Motor kurzschließen und es passiert im Prinzip nix... außer dass, wenn da noch eine Strom-/Spannungsquelle dran hängt am Motor (den ich überbrücke) dann dort ein hoher Strom in dem kurzgeschlossenen Stromkreis fließt... darum ging es aber nicht. Immernoch falsch?
Hallo Joe, du hast geschrieben >k1=k2 (Onsagersches Reziprozitätstheorem) (offens. Fehler editiert) das ist eine sehr interessante Feststellung/Aussage, könntest du weiter Infos/Quellen dazu nennen? (ich frage weil das Onsagersches Reziprozitätstheorem ist ein Theorem aus der statistischen Physik, aber statistische Physik hat hier beim Motor-Problem nichts zu suchen, mich interessiert also der Zusammenhang) Thx, Olli >Das Produkt aus dem Massenträgheitsmoment und der Winkelbeschleunigung >dieser Masse ist ein Moment, nennen wir es „dynamisches“ Moment. Das >Kreuzprodukt aus einer statischen Kraft an einem Hebelarm ist auch ein >Moment, nennen wir es „statisches“ Moment. Beide haben zunächst nichts >miteinander zu tun. Es sind zwei absolut unterschiedliche physikalische >Sachverhalte. nö, beide ergeben sich aus haargenau exakt dem selben physikalischen Zusammenhang. >Was mich gerade noch daran wundert ist, dass wenn das Drehmoment 0 ist, >der Strom trotzdem 2.4 A ist. Die richtige Antwort lautet: Ist normal, weil du in deinem Motormodel einen Leerlauf-Strom I0 = 2,4 A angenommen hast >Unterschied zwischen elektrischer und mechanischer Leistung meinst Ist eigentlich ganz einfach: Der Motor verbraucht elektrische Leistung und gibt im Gegenzug mechanische Leistung ab. Oder noch einfacher: elektrische Leistung geht vorne rein, und mechanische Leistung kommt hinten raus... >Warum nimmt das Drehmoment "nur" linear mit der Drehzahl ab? Die richtige Antwort lautet: Weil dein angenommenes Motormodel linear ist. Im Umkehrschluss kannst du daraus entnehmen dass es auch Motormodelle gibt, die nicht-linear sind, und das macht man um die Beschreibung des echten Motors noch besser hinzubekommen. Es ist allerdings so dass ein lineares Motormodel schon relativ gut funktioniert, und um sich eine Übersicht zu verschaffen taugt es i.R. sehr gut. >Wahrscheinlich lassen sich diese Formeln auch in die andere Richtung >umstellen..." Richtig >Dann wäre ich wieder bei meiner Theorie der (sehr kleinen?) zeitlichen >Verzögerung (sowas wie "Reaktionszeit") der reingesteckten Leistung zur >wirksamen Leistung... Es gibt eine "Verzögerung" dahingehend, dass wenn du vorne elektrische Leistung reinsteckt der Motor/Hebel nicht sofort auf Geschwindigkeit kommt sondern seine Zeit braucht, d.h. erst beschleunigt werden muss... die reingesteckte elektrische Leistung wird also Schritt für Schritt in immer mehr mechanische Leistung umgesetzt. Nennt man wie gesagt Beschleunigung. >Sonst könnte man Informationen über einen elektrischen Leiter schneller >als Lichtgeschwindigkeit übertragen." Da hast du recht, diese "Verzögerung" in der Beobachtung von Vorgängen aufgrund von Lichtlaufzeiten gibt es, aber deine angestrebte Geschwindigkeit (waren es 2 m/s ?) sind glaube ich deutlich langsammer als Lichtgeschwindigkeit... >Wenn ich das jetzt richtig verstanden habe, ist das jetzt so: Wenn ich >am Motor eine Spannung anlege, die höher ist die Urspannung (U_emk), >dann fließt ein Strom in positive Richtung und ich beschleunige damit >den Rotor (bzw. mein mechanisches System). Lege ich eine kleinere >Spannung an, oder schließe ich den Motor kurz fließt ein Strom in >Gegenrichtung und ich entziehe dem mechanischen System Energie. Ja, hast du. Im zweiten Fall arbeitet der Motor als Bremse/Generator. Wurde eigentlich die ursprüngliche Frage >Sprich: Ein Getriebe hilft mir tendenziell nicht, eine höhere >Beschleunigung zu erreichen..." beantwortet? Die Antwort: Doch. Mit Getriebe wird die Beschleunigung größer (die mögliche Enbdgeschwindigkeit allerdings kleiner).
Joe G. schrieb: > Stefan K. schrieb: >> Was mich gerade noch daran wundert ist, dass wenn das Drehmoment 0 ist, >> der Strom trotzdem 2.4 A ist. > > Das kann nicht sein, da M = k2*I ist. Da k2 ungleich Null ist, muss I=0 > sein Ist aber im Simulator von Mabuchi so und so hab ich das auch schon bei nem anderen Motorhersteller gesehen... Ruf mal den Simulatorlink auf: http://www.mabuchi-motor.co.jp/en_US/product/elsim.html?RS-540SH-7520/23400/2.40/70.0/196/4.8/7.2/7.2/0.0019/0.0039/0.0019/%28CCW+%29 und dann schieb den Regler für die Drehzahl ganz nach links zur Leerlaufdrehzahl (23400 U/min im Datenblatt). Dann sieht man links unten in der Anzeige: "Torque (mNm): 0.000" und "Current (A): 2.40 A" Spontan hätte ich das ja als den elektrischen Widerstand der Motorwicklung verbucht. Das wären ziemlich genau 3 Ohm.... oder entspricht halt irgendeinem Reibungsverlust, der da auftritt.
Stefan K. schrieb: > und dann schieb den Regler für die Drehzahl ganz nach links zur > Leerlaufdrehzahl (23400 U/min im Datenblatt). Dann sieht man links unten > in der Anzeige: "Torque (mNm): 0.000" und "Current (A): 2.40 A" Alles klar, war ein Missverständnis. Mit M=0 ist in der Simulation gemeint, dass der Motor im Leerlauf läuft, also kein Lastmoment entnommen wird. Hier ist der Strom selbstverständlich nicht Null, da es ohmsche Verluste und Reibungsverluste gibt.
Hallo Olli... @OlliW: >>Was mich gerade noch daran wundert ist, dass wenn das Drehmoment 0 ist, >>der Strom trotzdem 2.4 A ist. > > Die richtige Antwort lautet: Ist normal, weil du in deinem Motormodel > einen Leerlauf-Strom I0 = 2,4 A angenommen hast Soweit logisch. Die Formeln sind halt so definiert worden... aber -wieso- wurde das so gemacht. Es muss ja irgendeinen Sachverhalt in der Realität widerspiegeln und der interessiert mich. Mit anderen Worten: Was ist der Leerlaufstrom? Wie entsteht der? Was bewirkt er? Nach meinem Gespür muss das irgendeine Art von "Verlustleistung" sein. Denn sonst müsste die U_emk = U = 7.2 Volt sein und der Strom wäre entsprechend 0 A... wegen I = (U - U_emk) / R.
OlliW schrieb: > das ist eine sehr interessante Feststellung/Aussage, könntest du weiter > Infos/Quellen dazu nennen? Für das Thema zwar OT, doch eine kurze Erklärung zu deiner Frage. Wir betrachten lineare Flussgesetze der Form Jk = Lk*Xk J – Fluss einer physikalischen Größe k Lk – Transportkoeffizient der Größe k Xk – antreibende Kraft Wie man leicht sieht, fallen alle dissipativen Gesetze wie das Fouriersche Gesetz, das Ohmsche Gesetz, das Stokesche Reibungsgesetz usw. darunter. Nun beschränkt sich jedoch das Flussgesetz nicht auf den einen Summanden, sondern stellt eine beliebige Summe dar. Jk = Lkk*Xk + Lki*Xi Ji = Lik*Xk + Lii*Xi Lkk und Lii – direkte Transportkoeffizienten Lik und Lki – Kreuztransportkoeffizienten Dabei sind alle Lik = Lki (Onsagersche Reziprozitätsbeziehung). Nun erweitern wir das Onsagersche Modell. Die Transportkoeffizienten müssen ja nicht durch dissipative Einflüsse entstehen sondern stellen beliebige Flusskopplungen dar. Somit gilt diese Relation auch für den Motor. Es lassen sich übrigens viele weitere Beispiele dazu finden, z.B. der piezoelektrische Effekt.
Stefan K. schrieb: > Mit anderen Worten: Was ist der Leerlaufstrom? Wie entsteht der? Was > bewirkt er? Betrachten wir den stationären Zustand, d.h. der Motor dreht sich mit einer konstanten Leerlaufdrehzahl. Dann fließt der Lehrlaufstrom deshalb, weil es ohmsche Verluste im elektrischen Widerstand, magnetische Verluste im magnetischen Eisenkreis und mechanische Verluste in Form von Lagerreibung und Luftreibung gibt. Um den Motor auf der Konstanten Leerlaufdrehzahl zu halten, müssen genau diese Verluste ausgeglichen werden. Damit fließt ein Leerlaufstrom.
Joe G. schrieb: > Nein. Anbei die Herleitung der Dgl. bzw. des Motormodells als PDF bzw. > hier als Pencast zum ansehen und anhören. Ich erkläre beim Schreiben > noch etwas dazu ;-) > > http://www.livescribe.com/cgi-bin/WebObjects/LDApp... Hm, also wenn ich den Link aufrufe und die Aufnahme abspiele sehe ich zwar was nach und nach geschrieben wurde, aber ich höre nix dazu. Ich hab auch extra nochmal getestet. Lautstärke ist auf maximal gedreht und nicht stummgeschalten (andere Tonquellen funktionieren). Könntest Du das mal bitte überprüfen? (Danke)
Stefan K. schrieb: > Könntest Du das mal bitte überprüfen? (Danke) Bei mir geht es, die Datei hat eine Tonspur. Allerdings sollte Flash 11.5 installiert sein und Firefox macht auch oft Probleme. Beim guten alten IE geht es :-(
> Wenn man jetzt annimmt, dass das Drehmoment dem Haltemoment (Beispiel > 0,38 Nm) entspricht und wir an den Rotor einen Hebel mit 1 Meter Länge > montieren und an dessen Ende ein Gewicht von 1kg befestigen... dann > würde dieses mit 0,38 m/s² beschleunigt. Sicher? Ich persönlich würde bei einem 1m Hebelarm und 1kg Gewicht = 1kg*9,81m/s^2 = 9,81N*1m = 9,81Nm kommen. Wenn das Haltemoment jetzt 0,38Nm sind, wie soll der Hebelarm gehalten, geschweige denn beschleunigt werden?
@OlliW: >>Dann wäre ich wieder bei meiner Theorie der (sehr kleinen?) zeitlichen >>Verzögerung (sowas wie "Reaktionszeit") der reingesteckten Leistung zur >>wirksamen Leistung... > > Es gibt eine "Verzögerung" dahingehend, dass wenn du vorne elektrische > Leistung reinsteckt der Motor/Hebel nicht sofort auf Geschwindigkeit > kommt sondern seine Zeit braucht, d.h. erst beschleunigt werden muss... > die reingesteckte elektrische Leistung wird also Schritt für Schritt in > immer mehr mechanische Leistung umgesetzt. Nennt man wie gesagt > Beschleunigung. Klar, dass da nicht sofort "Geschwindigkeit" heraus kommt - da bin ich sofort dabei... Ich denke mein Denkfehler war, dass es sich beim Drehmoment um "Arbeit" handeln würde (wegen der Einheiten: Kraft und "Weg"). Diese Arbeit würde dann aber einer Energie entsprechen... Aber es ist im Prinzip eine "Rotations-Kraft". Wenn ich am Motor eine Spannung anlege, entsteht (mehr oder minder => Lichtgeschwindigkeit..) auf der anderen Seite eine Kraftwirkung. Aber noch ist keine Arbeit verrichtet worden, weil keine Zeit vergangen ist. Wenn dann diese Kraft (Drehmoment) kleiner als das Beharrungsmoment (auch Losbrechmoment; entsprechend der Haftreibungskraft) des Rotors und dem daran hängenden System ist, bleibt das ganze immernoch stehen. Die mechanische Energie wird dann über die Haftreibung in Wärme überführt. Erst wenn das Drehmoment größer ist als das Beharrungsmoment, geht der Rotor + daran hängendes System in den bewegten Zustand über... in dem dann Gleit und/oder Rollreibung (je nach Kopplung) und ggf. andere Widerstände (wie Luftreibung) wirken. Soweit ich das verstanden habe, entfällt das Beharrungsmoment dann komplett als Verlustleistung... Offen ist: Unter welchen Bedingungen fängt die Haftreibung wieder an zu wirken? Ohne Haftreibung wird ja eine Geschwindigkeit von 0 nie wieder erreicht. Die anderen Reibungskräfte wirken ja nur "prozentual"... d.h. die Bewegungsenergie geht gegen 0, erreicht diese aber nie.
@Joe > Allerdings sollte Flash > 11.5 installiert sein und Firefox macht auch oft Probleme. Beim guten > alten IE geht es :-( DAS ist ja mal heftig! Ja, im IE gehts bei mir... hätte nicht erwartet, dass für Flash der verwendete Browser relevant ist. Naja, zumindest funktioniert's dann mal so... Danke!
OlliW schrieb: > Wurde eigentlich die ursprüngliche Frage >>Sprich: Ein Getriebe hilft mir tendenziell nicht, eine höhere >>Beschleunigung zu erreichen..." > beantwortet? > > Die Antwort: Doch. Mit Getriebe wird die Beschleunigung größer (die > mögliche Enbdgeschwindigkeit allerdings kleiner). Nein, die wurde noch nicht beantwortet. Diese Kurzfassung macht spontan auch Sinn, muss ich mir aber eben noch durch den Kopf gehen lassen... sprich: Prüfen, ob das mit meinem aktuellen "Weltbild" zusammen passt ;-) (( UND WIEDER STÜRZEN WELTEN EIN!!! ... naja, ich hoffe nicht ;-))
@Olli: > Mit Getriebe wird die Beschleunigung größer (die > mögliche Enbdgeschwindigkeit allerdings kleiner). So... gehen wir das mal durch: Annahme: Ideale Übersetzung, keine Reibungsverluste Übersetzungs-Verhältnis:
Damit wir nicht mit "An" und "Ab" durcheinander kommen, nennen wir das ganze Einfach mal "motor" (Antrieb) und "out" (Abtrieb):
Heißt für das Anlaufen:
Für die Winkelbeschleunigung gilt:
...irgendwie kenn ich das doch von früher aus dem Physik-Unterricht grübelt Egal.. Das Ganze noch für die Leerlaufdrehzahl:
Sprich: N_out ist (auch im Leerlauf) 100 mal kleiner. Hm... ja stimmt! Die (rethorische) Frage ist nun, was hab ich mir dort oben bloß (falsches) gedacht? -- Naja, egal, Hauptsache ist ja - jetzt - ist der Denkfehler weg. Ah, ich glaub ich weiß was es war: Die Energie pro Zeit (=Leistung) ist natürlich in beiden Fällen gleich geblieben! Dennoch hat sich durch die Übersetzung die Kraft bzw. das Drehmoment geändert. Das wiederum ist z.B. relevant für die Überwindung des Haltemoments. Während ohne Übersetzung (oder "Übersetzung" in falsche Richtung) das Drehmoment im statischen Zustand (=Blockiermoment) möglicherweise unterhalb des Haltemoments ist, kann z.B. nach der Übersetzung das Haltemoment überschritten werden. D.h. eigentlich für die Motordimensionierung: 1. ich muss das maximal zu erwartende Trägheitsmoment berechnen (d.h. Gewichte und Hebellängen) 2. ich muss wissen, wie stark ich beschleunigen können will. 3. ich muss wissen, wie hoch meine nötige maximale Winkelgeschwindigkeit ist. 4. Aus den Motorkenndaten brauche ich insbesondere die Leistung und das Blockiermoment Aus 1. und 2. kann man die Mindestleistung des Motors berechnen. Über die Motorkenndaten erfahre ich die Leerlaufdrehzahl. Die teile ich durch die nötige maximale Winkelgeschwindigkeit und erhalte so das maximale Übersetzungsverhältnis für das Getriebe (das muss ggf. etwas unterdimensioniert werden, weil man genau den Wert nicht erreichen wird). Über das Übersetzungsverhältnis bekomme ich zusammen mit dem Blockiermoment ein "Blockiermoment" für nach dem Getriebe. Dieses muss unter anderem höher sein als mein Haltemoment, sonst funktioniert's nicht. Zusätzlich muss ich noch sämtliche Reibungsverluste (z.B. Getriebe, Lager, ggf. Luftreibung...) auf die Mindest-Motorleistung aufschlagen. Hm, da stellt sich spontan noch eine Frage: Wenn der Motor unter Last steht, erreiche ich nicht mehr die Leerlaufdrehzahl... sondern die "Last"-Drehzahl, wie berechnet sich die? Die müsste doch allein abhängig sein von meinen Reibungsverlusten. Die Reibungsverluste erzeugen ein Gegenmoment zu meinem Antriebsmoment... und wenn das Antriebsmoment auf dieses Gegenmoment abgesunken ist, ist die maximal erreichbare Drehzahl erreicht. Richtig? Dann muss ich jetzt mal noch schauen, ob ich das Gegenmoment berechnet bekomme... ABER: Zuerst schau ich mir jetzt -endlich- mal das "Lehrvideo" von Joe an...
@Joe, Danke für die Antwort, aber offengesagt beantwortet hast du die Frage nicht :-) Ich kenne das Onsager-Gesetz gut, aber ich kenne es als ein Ergebnis der statistischen Physik die beim E-Motor nun gar keine Rolle spielt. Anders gesagt, auch wenn man lineare Beziehungen angeben kann, hat man ja wirklich nicht auch automatisch Reziprokizität-Bedingungen (und mehr als dass man lineare Beziehungen hat hast du als Grund nicht angeführt). >Wie man leicht sieht, fallen alle dissipativen Gesetze wie das >Fouriersche Gesetz, das Ohmsche Gesetz, das Stokesche Reibungsgesetz >usw. darunter. RICHTIG! >Die Transportkoeffizienten müssen ja nicht durch dissipative Einflüsse >entstehen sondern stellen beliebige Flusskopplungen dar. Somit gilt diese >Relation auch für den Motor. ??? ... was zu zeigen wäre, bzw., eine überzeugende Antwort darauf wäre die Antwort meiner Frage >Es lassen sich übrigens viele weitere >Beispiele dazu finden, z.B. der piezoelektrische Effekt. und es lassen sich auch viele Gegenbeispiele finden... ohne den wahren Grund/Vorraussetzungen/Bedingungen anzugeben "beweist" das gar nichts (i.Ü. passt der piezoelektrische Effekt wieder zu Überlegungen der statistischen Physik, im Gegensatz zum E-Motor, und ist daher kein gutes Beispiel zur Untermauerung des Arguments) :-) Es wäre schön die Antwort auf den vorletzten Punkt zu wissen, also warum genau sich die O-Beziehungen auf den E-Motor verallgemeinern lassen. Thx >Wenn der Motor unter Last steht, erreiche ich nicht mehr die >Leerlaufdrehzahl... sondern die "Last"-Drehzahl, wie berechnet sich die? M = k * ( I - I0 ) U = k * omega + R * I
OlliW schrieb: >>Wenn der Motor unter Last steht, erreiche ich nicht mehr die >>Leerlaufdrehzahl... sondern die "Last"-Drehzahl, wie berechnet sich die? > > M = k * ( I - I0 ) > U = k * omega + R * I Ok, dann forme ich mal lustig Gleichungen um und schaue was ich davon habe. Wir wollen eine "Last"-Drehzahl, also brauchen wir "omega", daher stellen wir die letzte Gleichung nach omega um:
Jetzt stellen wir noch die andere Gleichung nach I um:
und setzen sie ein:
U ist konstant und bekannt... R dürfte konstant sein, steht im Datenblatt ( R = U_nom / I_leerlauf ??) k ist konstant, irgendwie zu ermitteln... I_0 ist auch im Datenblatt und M ist wohl dann das Reibungsmoment. Das Reibungsmoment zu berechnen wird wahrscheinlich etwas hässlicher, so wie das Trägheitsmoment jedoch mit "Reibungspunktkräften" statt Punktmassen...
Martin Schwaikert schrieb: > Sicher? Ich persönlich würde bei einem 1m Hebelarm und 1kg Gewicht = > 1kg*9,81m/s^2 = 9,81N*1m = 9,81Nm kommen. Wenn das Haltemoment jetzt > 0,38Nm sind, wie soll der Hebelarm gehalten, geschweige denn > beschleunigt werden? Mein gedanklicher Versuchsaufbau ist etwas anders. Dreh mal das Ganze so, dass die Rotationsachse senkrecht ist, d.h. sich die Höhe des Gewichts nicht ändert. Dann wirkt die Erdanziehungskraft nur noch in Form von Reibung, die wir vorerst vernachlässigen wollten....
>und M ist wohl dann das Reibungsmoment
nein, M ist das vom Motor gelieferte mechanische Drehmoment (wozu immer
du das benutzt, zum überwinden von Reibungskräften/momenten, zum heben
und senken von Hebelarmen mit Gewicht, zum Durchrühren von
Plätzchenteig...), so wie du es im 02:14 Post angegeben hast.
OlliW schrieb: > Danke für die Antwort, aber offengesagt beantwortet hast du die Frage > nicht :-) Gib mir bitte dafür etwas Zeit. Ich muß eine exakte Begründung erst mal aufschreiben. OlliW schrieb: > ??? ... was zu zeigen wäre, bzw., eine überzeugende Antwort darauf wäre > die Antwort meiner Frage Das ist leider nicht in zwei Sätzen hier im Forum hingeschrieben. Ich schreib mal auf Papier... OlliW schrieb: > und es lassen sich auch viele Gegenbeispiele finden... JAAAA bitte her damit! Damit läßt sich ja prima eine Theorie bestätigen oder widerlegen. Ich habe nämlich noch kein Gegenbeispiel gefunden.
>Gib mir bitte dafür etwas Zeit. gerne, kein Problem >Das ist leider nicht in zwei Sätzen hier im Forum hingeschrieben. eine Quellenangabe würde es auch tun >Ich habe nämlich noch kein Gegenbeispiel gefunden. Trafo? Auch "Reziprozität" in den Gegenkopplungen (aus trivialen Gründen), hat aber Null und Nichts mit Onsager zu tun... (sondern mit Gauss'schen/Stoke'schen Sätzen)
Ich nehme an, den Seebeck- und den Peltier-Effekt akzeptierst du für die O-Relation. Darauf würde ich das restliche Gerüst aufbauen. Übrigens passen die Gauss'schen/Stoke'schen Sätze perfekt in das Modell. OlliW schrieb: > eine Quellenangabe würde es auch tun Ich kenne leider keine Quelle die das in meinem Sinne schon untersucht hat.
>den Seebeck- und den Peltier-Effekt akzeptierst du für die >O-Relation na klar, 1000000prozentig, sind doch DIE Beispiele for O-Relation >Darauf würde ich das restliche Gerüst aufbauen Wie gesagt die O-Beziehung aus der statistischen Physik (also Seebeck, etc. pp) kenne ich gut... die brauchst du mir also nicht erklären :-) warum die sich auf den E Motor verallgemeinern lassen sollte bzw lässt dagegen schon >Übrigens passen die Gauss'schen/Stoke'schen Sätze perfekt in das Modell. hat nur leider nichts und gar nichts mit der Onsager-Relation zu tun... ... und die genannten disspativen/thermodynamischen/statistischen Beispiele wie Seebeck, Peltier, Fouriersche Gesetz, Ohmsche Gesetz, Ficksches Gesetz etc. pp haben umgekehrt nichts mit den Gauss'schen/Stoke'schen Sätzen zu tun. (in welches Modell passen die eigentlich, du meinst das Jk = Lkk*Xk + Lki*Xi, Ji = Lik*Xk + Lii*Xi Modell? Oder das E-Motor Modell? Ins Letztere würde es passen, ins Erstere nicht)
@OlliW Hier nun meine Erklärung, warum die Motorkonstante ein symmetrischer Kreuzkoeffizient nach der Onsager-Relation ist (etwas besser im PDF). Die Darstellung nutzt die folgende Voraussetzung. 1. Die Verlustleistung eines jeden physikalischen Systems (Entropieerzeugung) zerfällt regelmäßig in eine Summe von Produkten aus Flüssen und Kräften. 2. Der Fluss einer beliebigen physikalischen Größe kann als Produkt aus einem Transportkoeffizienten und der korrespondierenden Kraft dargestellt werden. 3. Bei Wechselwirkungen zwischen physikalischen Systemen wirken nicht nur korrespondierende Kräfte, sondern auch Kreuzkräfte. Modell Motor 4. Das Modell Motor geht davon aus, dass die elektrische Leistung (Produkt aus Kräften und Flüssen) mit der mechanischen Leistung (Produkt aus Kräften und Flüssen) gekoppelt ist. Das tatsächliche physikalische Prinzip ist dabei unwichtig. 5. Gehen wir von 4. aus (entspricht 1.) dann gilt auch 2. und 3. Damit entspricht die Motorkonstante den Kreuzeffizienten der Onsager-Relation q.e.d.
@Joe & Olli Jetzt geht's ja voll ab bei Euch ;-) Und: Mich stört's nicht... falls das einer von Euch befürchtet. Ich erkenne sehr klar, was an mich geht und überlese das andere dezent... Am Ende hat man in dem Thread hier dann das geballte theoretische Wissen zu Motoren und Drehmoment für eine große Spanne an Wissensleveln. @Joe: Ich hab mir das LiveScribe von Dir mal zu Gemüte geführt... und so langsam habe ich das Gefühl, dass Du eigentlich Dozent an einer Uni bist, jedenfalls von der Wissenspräsentation her... also die Didaktik ist recht gut. Allerdings (ja, es gibt fast immer ein aber) habe ich es leider nur "größtenteils" verstanden (glaub so 70%), was vor allem an fehlendem Vorwissen liegt. Ich werde es mir kurzfristig noch einmal ansehen und dann mal meine Fragen dazu stellen. Am Besten auch irgendwie interaktiv... Grüße, Stefan
@Joe, Danke für diese Erläuterungen. :top: Allerdings... sie sind IMHO falsch... bzw. nur für eine sehr idealiserte Situation gültig... Deine Argumentation ist letztendlich äquivalent zur Argumentation über die Energieerhaltung, also dass aus den im pdf angegebenen Beziehungen nur dann P_el = P_mechanisch + R*I^2 + P_verlust folgt wenn L12 = L21 ist. Aber das ist halt falsch. Es gibt einige Einwände. Der Einfachste: Das Problem fängt schon damit an dass P_el = U*I FALSCH ist! Diese Bezienung gilt nur und nur dann wenn U und/oder I zeitlich konstant sind (die angegebenen zwei Motorgleichungen gelten aber nachwievor, denn die Größen können hier ohne Problem als Zeitmittelungen genommen werden). Wenn U und I zeitlich nicht konstant sind, was sie bei einem Motor quasi nach Prinzip nicht sind, dann gilt nur P_el >= U*I (wobei U, I als Zeitmittelwerte betrachtet werden, so wie sie dann ja auch in den zwei Motorgleichungen stehen). D.h., die Argumentation ist für eine sehr idealisierte Situation OK, aber nicht im Allgemeinen (was nicht ausschliesst dass die idealisierte Situation ausreichend gut für die Praxis sein mag, aber im Allgemeinen halt nicht, d.h. es gibt - laps gesagt - Ausnahmen von der Regel). Ich habe diese Diskussion "angezettelt" weil ich mich tatsächlich genau mit dieser Frage schon mal sehr intensiv beschäftigt habe (http://www.olliw.eu/tag/t_emotor/), und ich bisher nur einen Beweis für den Fall habe, dass die Magnetfelder in denen sich der Rotor dreht zeitlich konstant sind (was sie bei Ummagnetisierungsprozessen z.B. nicht wären), und der Rotor sich baulich nicht verändert (z.B. keine lockeren Windungen). Leider ist mein Beweis sehr umständlich, und läßt auch nicht erkennen ob es evtl. noch allgemeiner ginge. Dein obiger Hinweis hatte daher sofort mein Interesse geweckt, bzw. die Hoffnung dass es einfacher und/oder allgemeiner ginge (hat sich ja leider nicht bestätigt). Jedenfalls, Danke für die Diskussion, war sehr nett! Cheers, Olli
OlliW schrieb: > Es gibt einige Einwände. Der Einfachste: Das Problem fängt schon damit > an dass P_el = U*I FALSCH ist! Diese Bezienung gilt nur und nur dann > wenn U und/oder I zeitlich konstant sind Diesen Einwand kann ich nicht gelten lassen. Dazu die folgende Begründung: 1. Es gibt in jedem physikalischen Einzelsystem Energiespeicher induktiver und kapazitiver Art. Die in diesem System ablaufenden Umspeicherprozesse sorgen systembedingt für eine nicht zeitliche Konstanz der „Flüsse“ und „Kräfte“. 2. Die zeitliche Variabilität beider Einzelprozesse ist unterschiedlich, d.h. es kann keine Synchronität vorausgesetzt werden. 3. Der Energieaustausch basiert auf einer Prozesskopplung in dem die Prozessleistung ausgetauscht wird. Der Austausch der Prozessleistung ist jedoch nicht abhängig von dem jeweiligen inneren Zeitverhalten der Einzelprozesse (Energieerhaltungssatz). 4. Wir definieren auf beiden Seiten (elektrische Seite / mechanische Seite) jeweils zwei „Gleichvariablen“ deren Einzelprodukt genau der Prozessleistung entspricht. 5. weiter wie schon angeführt. q.e.d.
Nachtrag: Mir ist gerade noch ein simples Beispiel dafür eingefallen. Wir nehmen eine Gleichspannungsquelle und speisen über einen Wechselrichter einen Wechselstrommotor. Der Wirkungsgrad des Wechselrichters kann exakt bestimmt werden. Nun haben wir auf der elektrischen Seite zwei Gleichgrößen und auf der mechanischen Seite zwei Gleichgrößen. Die internen Wechselgrößen spielen für die Reziprozitätsbetrachtungen keine Rolle.
1.-3. OK >4. Wir definieren auf beiden Seiten (elektrische Seite / mechanische >Seite) jeweils zwei „Gleichvariablen“ deren Einzelprodukt genau der >Prozessleistung entspricht. womit alle z.B. Verlustmechanismen die auf der zeitlichen Variabilität beruhen (konkret z.B. Umagnetisierungsverluste), als nichtexistent "wegdefiniert" wurden => nix mit q.e.d. da 4. i. A. falsch. In deinem Beispiel ist z.B. die Annahme dass sich die Winkelgeschwindigkeit während einer Umdrehung nicht ändert falsch (Änderung ist vielleicht klein aber nicht Null, ist also eine Näherung) => nix mit zwei Gleichgrößen. Anders gesagt, wenn du deine Definition machst, was man kann, dann musst du, in unserem Beispiel, die Motorgleichungen ergänzen, um die Prozesse die "vergessen" wurden nicht zu vergessen.
OlliW schrieb: > womit alle z.B. Verlustmechanismen die auf der zeitlichen Variabilität > beruhen (konkret z.B. Umagnetisierungsverluste), als nichtexistent > "wegdefiniert" wurden Betrachte das System doch mal mit etwas Abstand. Selbstverständlich dürfen Verlustmechanismen existieren die auf zeitlicher Variabilität beruhen. Die Verluste werden einem dissipativen Element auf jeder Wandlerseite zugeordnet. Das Verhältnis dieser Verluste ergibt ja gerade den Wirkungsgrad. Auf der mechanischen Seite interessiert nicht ob die Winkelgeschwindigkeit oder das Drehmoment schwankt. Es existiert ja tatsächlich eine mechanische Leistung und genau die wird einem „fiktiven“ Gleichmoment und einer „fiktiven“ Winkelgeschwindigkeit zugeordnet, die genau dieser realen Leistung entsprechen. Es geht doch nur um den Nachweis der Symmetrie der Koeffizienten! Im Übrigen hat Onsager auch nicht zwischen Gleich- oder Wechselgrößen unterschieden. Bei ihm haben „Kräfte“ immer ein positives Vorzeichen und „Flüsse“ haben, je nachdem ob sie Leistung erzeugen oder verbrauchen, ein wechselndes Vorzeichen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.