Hallo miteinander, ich habe einen Kamera Remote Head der leider zu ruckartig anläuft und stoppt. Hier ein Link zum Modell: http://www.servocity.com/html/pt-2100_pan__tilt_system.html Angetrieben wird der Head von folgenden Motoren: http://www.servocity.com/html/20_rpm_precision_gear_motor.html Gesteuert wird hiermit: http://www.servocity.com/html/4_motor_controller_system.html Ich verzweifle langsam, weil niemand den ich kenne in der Lage ist, mir zu sagen, wie und womit es möglich wäre, sanft anzufahren bzw. zu bremsen. Das macht doch jede Modelleisenbahn. Die jetzigen Motoren können es jedenfalls nicht, weil sie mind 1,2V benötigen, um überhaupt zu drehen. Darunter tut sich gar nichts. Also eigentlich sind sie völlig ungeeignet. Aber was ist zu tun? Was ist zu kaufen? Da muss es doch machbare Lösungen geben. Ich bin mir bewusst, dass es Zeit und folglich Geld kosten wird und bin gerne bereit, dafür zu zahlen. Super wäre, wenn jemand weiß wovon ich rede und sowas (oder ähnliches) schon mal gebaut hat. Wer kann mir helfen? Gruß, Dirk
Moin, Die Motoren sehen wie ganz normale Gleichstrommotoren aus. Die kannst Du mit einer PWM-getakten Spannung ansteuern. Dann kannst Du die Motoren auch gaaaanz lansam drehen lassen (so macht das jedenfalls die Modellbahn). Grüße Muetze
Laut Beschreibung deiner links sollten die doch damit regelbar sein. Und der Motor soll 6-12V haben. Wenn du da 1,2V misst stimmt da was nich. Evtl kaputt?
Wenn ich das auf den Links richtig gelesen habe, dann ist es extrem clever, was die da machen. PWM-Signal vom Joystick in ne Gleichspannung wandeln und diese dann auf den Motor geben.. Ich hab so das komische Gefühl, dass ich es genau andersrum machen würde.... :-)
Was ist jetzt dein Problem ? Das ist doch ein Fertigprodukt. Wenn es die Werbeaussagen nicht erfüllt "smooth" dann gib es zurück.
Schlumpf schrieb: > Wenn ich das auf den Links richtig gelesen habe, dann ist es extrem > clever, was die da machen. > PWM-Signal vom Joystick in ne Gleichspannung wandeln und diese dann auf > den Motor geben.. > Ich hab so das komische Gefühl, dass ich es genau andersrum machen > würde.... :-) Das sind Werbeaussagen. Ziemlich sicher nicht vom Entwickler geschrieben. Ehe ich da nicht ein Oszi drann hängen habe, würde ich dem erstmal nicht trauen. Und genau unter dem Gesichtspunkt würde ich auch die 1.2V des TO sehen. Was ein Voltmeter bei einer PWM anzeigt, hat nicht wirklich was damit zu tun, was der Motor dann mit der PWM-Spannung macht.
Karl Heinz Buchegger schrieb: > Das sind Werbeaussagen. Ziemlich sicher nicht vom Entwickler > geschrieben. Ehe ich da nicht ein Oszi drann hängen habe, würde ich dem > erstmal nicht trauen. Und genau unter dem Gesichtspunkt würde ich auch > die 1.2V des TO sehen. Was ein Voltmeter bei einer PWM anzeigt, hat > nicht wirklich was damit zu tun, was der Motor dann mit der PWM-Spannung > macht. Wollen wir zur Ehrenrettung der Elektronikerzunft hoffen, dass du Recht hast ;-)
Vielleicht sind ja auch nur einfach deine Lager ein wenig schwergängig? Schon mal gecheckt?
> in ne Gleichspannung
da steht jedoch in der Beschreibung:
"The 4 channel speed controller converts the PWM input
from the dual joystick
into varying voltages
which travel through the CAT6 cable (sold separately) to the
CAT6 - motor circuit board where the motor wires can be soldered in."
Rezeptionist schrieb: >> in ne Gleichspannung > da steht jedoch in der Beschreibung: > > "The 4 channel speed controller converts the PWM input > from the dual joystick > > into varying voltages > > which travel through the CAT6 cable (sold separately) to the > CAT6 - motor circuit board where the motor wires can be soldered in." Schon klar. Aber einer Beschreibung, bei der die Spannung durch ein Kabel 'travelled' traue ich keine technische Akkuratesse zu. Da sind die Stichworte PWM, Spannung, Strom, Motor und Joystick drinnen und für einen Werbefritzen reicht das dann schon. Ausserdem ist das ein Fertigprodukt. Wie das im Detail funktioniert interessiert den Anwender herzlich wenig. Vor allen Dingen nicht den Amerikaner. Für den ist nur wichtig, dass es 'it's soooo easy' is. Und natürlich fatfree.
Mit einer sauberen Drehzahlregelung zuzüglich einem PT1- oder PT2-Vorfilter sollte es doch weich genug sein. Vielleicht kann man auch diverse Haftreibmomente reduzieren. mfg mf
Wie Karl Heinz bereits gesagt hat: Schau Dir mal die Lager bzw. die Lagerung an und zwar mit Deiner Last und nicht unbelastet. Im Katalog und unbelastet laufen die Dinger immer prima. Insbesondere durch lastabhängige Asymmetrien, da reichen manchmal ein paar Gramm, kann es dann zu Rucklern kommen.
Vielen Dank für die Antworten. Was heißt "smooth"? Wenn ich die Bewegung und speziell den Start "von außen" betrachte, ist der Head durchaus "smooth" unterwegs und dreht auch sehr sanft an. Schaue ich aber auf den Kontrollmonitor mit meinem Kamerabild, kriege ich Juckreiz: man sieht IMMER einen Ruck, wenn die Drehung beginnt. IMMER. Für mich unbrauchbar. Die 1,2V "Start-Spannung" haben wir ohne Last gemessen. Mit Last beginnt die Achse bei 1,7V zu drehen (horizontal). Die Elektro-Leute, die ich kenne und die sich den Head angesehen haben, sagten unabhängig voneinander, dass ich alles neu bräuchte: Motoren und Steuerung. Denn ein weiteres Problem ist die max Geschwindigkeit: ein 180° Schwenk unter "Vollgas" dauert 7,9 Sek. Das müsste aber in ca 1 Sek geschehen. Durch ausgiebige Internet-Spionage bei hochpreisigen Remote Head Herstellern stellte ich fest, dass diese ihre Köpfe mit Servo- oder Schrittmotoren antreiben. Dummerweise hoben die E-Freaks aus meinem Bekanntenkreis beim Thema "Motorsteuerung" alle die Hände. Deshalb suche ich nach einer Lösung, bzw einem Lösenden, der mir nicht nur vorschlägt, was zu tun ist, sondern es machen kann. Natürlich gegen Bezahlung. Da ich wie gesagt völlig ahnungslos bin habe ich auch keine Vorstellung von Aufwand und Kosten. Müsste im Vorfeld alles geklärt werden. Fest steht, dass es so wie es ist, nicht bleiben kann. Gruß, Dirk
Dirk Razzia schrieb: > Schaue ich aber auf den Kontrollmonitor mit meinem > Kamerabild, kriege ich Juckreiz: man sieht IMMER einen Ruck, wenn die > Drehung beginnt. IMMER. Für mich unbrauchbar. Hast du bei der Kamera den Bildstabilisator deaktiviert?
Dirk Razzia schrieb: > Kamerabild, kriege ich Juckreiz: man sieht IMMER einen Ruck, wenn die > Drehung beginnt. IMMER. Für mich unbrauchbar. Den wirst du auch immer haben. IMMER. Er mag so klein sein, dass er nicht auffällt. Aber rucken wird es immer. Denn infinitesimal langsam kann auch der beste MOtor nicht fahren. Damit hast du einen Übergang von 0 auf 'sehr, sehr wenig'. Und da das, mathematisch gesprochen, einem Knick in der 1. Ableitung der Geschwindigkeitsfunktion gleichkommt, fällt dir das auf. Das Auge ist da evolutionär sehr empfindlich. > Steuerung. Denn ein weiteres Problem ist die max Geschwindigkeit: ein > 180° Schwenk unter "Vollgas" dauert 7,9 Sek. Das müsste aber in ca 1 Sek > geschehen. Ist das die Herstellervorgabe? 1 Sekunde? Dann hast du ja einen Grund zum reklamieren, wenn es nicht ein mechanisches Problem ist. Lager schwergängig, Riemen zu stark gespannt. > Bezahlung. Da ich wie gesagt völlig ahnungslos bin habe ich auch keine > Vorstellung von Aufwand und Kosten. Müsste im Vorfeld alles geklärt > werden. Im Vorfeld müsste man erst mal analysieren, was eigentlich das Problem ist. Da können Stunden draufgehen, ohne das man zu einer Idee kommt.
Die Motoren sind mit 6 - 12VDC Arbeitsbereich angegeben, was einer Drehzahländerung von 2:1 entspricht. Wenn eine Achse bei 1,7V zu drehen anfängt, wäre das ein grobes Verhältnis von 7:1. In der Praxis sind für Getriebemotore mit Last max. 5:1 Änderung der Drehgeschwindigkeit realistisch, wenn der Lauf ruhig und konstant sein soll. Die angegebene Drehgeschwindigkeit von 20°/s bedeutet: 180° in 9s. Die genannten 0,5°/s sind Illusion. In welcher Ecke des Landes bist du denn beheimatet?
Karl Heinz Buchegger schrieb: > Aber rucken wird es immer. Es gibt aber doch zahllose Beispiele dafür, dass es ohne geht. Oder halt so wenig ruckelt, dass es nicht mehr auffällt. Karl Heinz Buchegger schrieb: > Ist das die Herstellervorgabe? 1 Sekunde? Nein. Das ist meine Vorstellung von der Idealgeschw., da ich viel "Auto" filme. Magnus M. schrieb: > Hast du bei der Kamera den Bildstabilisator deaktiviert? Na klar. Wenn nicht, würde das Bild auch die ganze Zeit ruckeln und nicht nur beim Start. Neu Gier schrieb: > In welcher Ecke des Landes bist du denn beheimatet? Recklinghausen. Das, was Du vorher geschrieben hast, verstehe ich leider nicht. Der Head braucht aber keine 9 Sek für 180°. Ich habe mit meiner Handy-Stoppuhr immer unter 8 Sek gemessen - links herum und rechts herum. Fällt mir grad noch ein: Wenn man sehr sehr langsam den Joystick bewegt, kann es passieren, dass man eine Stellung erwischt, in welcher der Motor anfängt, nervös zu zappeln. Dann will er sowohl rechts als auch links rum. Ist man darüber hinaus, dreht er in die gewollte Richtung.
Dirk Razzia schrieb: > auch sehr sanft an. Schaue ich aber auf den Kontrollmonitor mit meinem > Kamerabild, kriege ich Juckreiz: man sieht IMMER einen Ruck, wenn die > Drehung beginnt. IMMER. Für mich unbrauchbar. Kannst du mal ein kurzes Video auf Youtube posten, in welchem man diesen Ruck deutlich sehen kann?
Dirk Razzia schrieb: > Karl Heinz Buchegger schrieb: >> Aber rucken wird es immer. > > Es gibt aber doch zahllose Beispiele dafür, dass es ohne geht. Oder halt > so wenig ruckelt, dass es nicht mehr auffällt. Tja. Das ist dann aber keine einfache Rampe mehr. Die Geschwindigkeitsfunktion hat dann schon mehr Ähnlichkeit mit einem Spline als mit einer Geraden. Da kann ich nur sagen: viel Spass beim rechnen. >> Ist das die Herstellervorgabe? 1 Sekunde? > > Nein. Das ist meine Vorstellung von der Idealgeschw., da ich viel "Auto" > filme. Ich denke nicht dass, das geht. Man kann ja mal versuchen auszurechnen, welche Geschwindigkeit der Head dazu erreichen müsste, wenn er zusätzlich auch noch weich anfahren und abbremsen soll und welche Motoren man da brauchen würde um das möglich zu machen. Bewegte Masse will ja auch erst mal beschleunigt werden.
Dirk Razzia schrieb: > Recklinghausen. Das ist zu weit weg von hier, um sich die Sachen anzusehen. > Das, was Du vorher geschrieben hast, verstehe ich leider nicht. Der Head > braucht aber keine 9 Sek für 180°. Ich habe mit meiner Handy-Stoppuhr > immer unter 8 Sek gemessen - links herum und rechts herum. Ich wollte aufzeigen, was mit den angegebenen Daten erreicht werden kann, und vor allem, was eben auch nicht. Wenn der Motor schneller dreht als beschrieben, dann ist das so. Aber deine Wunschgeschwindigkeit bringt er ja in keiner Weise. 180° in einer Sekunde mit Start-Stopp-Rampen ist möglich. Unter Umständen müßte man aber den Ständer arretieren, damit die Mechanik nicht umfällt. Mehr kann man aus der Distanz nicht sagen.
Karl Heinz Buchegger schrieb: > Das ist dann aber keine einfache Rampe mehr. Ok, was aber dann? Neu Gier schrieb: > 180° in einer Sekunde mit Start-Stopp-Rampen ist möglich. Nicht, dass wir uns missverstehen: er muss nicht 180 in 1 Sek inkl. Start/Stopp-Rampe drehen. Ich benötige für langsame Bewegungen ruckfreies Anfahren und grundsätzlich sanftes Bremsen. Ein ruckfreier 180°-Schwenk in 1 Sek ist nicht erforderlich. Die Rampen dürften noch dazu gerechnet werden. Allerdingfs sollte er schon in einer 1 Sek 180° drehen. Neu Gier schrieb: > Unter > Umständen müßte man aber den Ständer arretieren, damit die Mechanik > nicht umfällt. Der Kopf hängt an einem Kran. Da kann (eigentlich) nichts umkippen. Ich werde morgen mal versuchen, ein aussagekräftiges Video hochzuladen, damit ihr das Ruck-Desaster besser beurteilen könnt. Gruß, Dirk
Mal nebenbei gefragt: Welche Kamera hast du im Einsatz (Modellnummer)?
Schau doch mal, ob einer Elektro-Kumpels ein Oszi ranschaffen kann und dann zeichne mal Bitte die Spannung am Motor auf und poste das hier. Dann wissen wir zumindest, ob Servocity-Kameraden tatsächlich den Motor mit einer Gleichspannung steuern (wie in der Beschreibung behauptet) oder doch mit einem PWM.
...da liegt kein elektrisches sondern ein mechanisches Problem vor ! Wie verhaelt es sich mit Traegheit an der langen Stange ?
Magnus M. schrieb: > Welche Kamera hast du im Einsatz (Modellnummer)? Verschiedene Modelle, von DSLR über Camcorder bis RED. Der Kopf ist ausgelegt bis ca 10kg. Schlumpf schrieb: > Schau doch mal, ob einer Elektro-Kumpels ein Oszi ranschaffen kann und > dann zeichne mal Bitte die Spannung am Motor auf und poste das hier. Morgen (Samstag) wird ein Kollege die Messungen durchführen. Ergebnisse werden vorgelegt. kukuk schrieb: > Wie verhaelt es sich mit Traegheit an der langen Stange ? Was/wo ist die "lange Stange"? Auch, dass es ein mechanisches Problem soll, verstehe ich nicht. Der Motor läuft doch so "spät" los, obwohl er frei von irgendwelchen Lasten ist.
> sanft anzufahren bzw. zu bremsen. Du benötigst nicht nur eine Anfahrrampe mit konstanter Beschleunigung, sondern die Ableitung der Beschleunigung muß kontinuierlich sein. Das ist einfach eine andere Berechnungmethode, stetig in zweiter Ableitung, und hängt nicht von den Motoren und andere Technik ab, wenn es Servomotore sind, also mit einem Sensor nachgeguckt wird wie die sich bewegen kann eine Elektronik die vollkommen "smooth" laufen lassen, sogar eher schlehcte Motoren. Dein Ding hat das einfach nicht und kann das einfach ncith, zurückschicken und was (teureres) kaufen. > Das macht doch jede Modelleisenbahn. Nein.
Hi Was erwartest du eigentlich von diesen Spielzeugmotoren? Die Leistungsabgabe liegt optimistisch geschätzt bei 5..6W. Und wenn dann auch noch die Ansteuerung suboptimal ist, kommt das heraus, was du erlebst. MfG Spess
MaWin schrieb: > wenn > es Servomotore sind, also mit einem Sensor nachgeguckt wird wie die sich > bewegen kann eine Elektronik die vollkommen "smooth" laufen lassen, > sogar eher schlehcte Motoren. > > Dein Ding hat das einfach nicht und kann das einfach ncith, > zurückschicken und was (teureres) kaufen. Warum soll ich den kompletten Kopf zurückschicken, nur weil er keine Servomotoren mit entsprechender Steuerung hat? Das ist doch keine Swatch. Alle Teile sind austauschbar und Servomotoren, Potis, Joysticks, Platinen, Lötkolben gibt es überall zu kaufen. Es fehlt mir an Know How, weshalb ich hier ursprünglich diesen Thread eröffnete. Spess53 schrieb: > Was erwartest du eigentlich von diesen Spielzeugmotoren? Nichts! Ich erwarte oder besser erhoffe, dass ein E-Motor-Kenner meinen Hilferuf liest, sagt, welcher Motor mit welcher Steuerung benötigt wird und was es kostet, wenn er das zusammenlötet.
> Warum soll ich den kompletten Kopf zurückschicken
Weil du nicht den halben Kopf zurückschicken kannst,
und es nicht dein Job ist,
den Schrott eines kommerziellen Fertigprodukts zu reparieren,
weil du dir deinen Beschaffungsfehler nicht eingestehen willst.
Dirk Razzia schrieb: > Spess53 schrieb: >> Was erwartest du eigentlich von diesen Spielzeugmotoren? > > Nichts! Ich erwarte oder besser erhoffe, dass ein E-Motor-Kenner meinen > Hilferuf liest, sagt, welcher Motor mit welcher Steuerung benötigt wird > und was es kostet, wenn er das zusammenlötet. Mit reinem Zusammenlöten wird es wahrscheinlich nicht getan sein. Wolltest du nicht ein kurzes Video posten?
Das ist ja katastrophal! War während der Filmaufnahmen ein Erdbeben? :-) :-) :-)
Du solltest noch prüfen, wie der DC-Motor betrieben wird: mit varibaler Gleichspannung oder per PWM (pulsweiten moduliertes Rechtecksignal). Eine 'flüssige' Bewegung bekommt man wohl nur mit einen Schrittmotor+Getriebe (oder auch BLDC-Motor) hin. Wenn ich die Mechanik auf dem Tisch hätte, würde ich das bei einer Achse probieren und sehen, wie schwingungsfrei die Mechanik selber ist. Ich will mal eine grobe Kostenschätzung für den Austausch der DC-Motore geben: Schritt- oder BLDC-Motor mit Getriebe rund € 200/Achse; Ansteuerschaltung für den Motor rund € 100/Achse; Auswertung/Umwandlung der vorhandenen Steuersignale per µC plus notwendiges Netzteil (24V bzw. 48V) rund € 400 für beide Achsen. Das wären die Kosten, wenn dir jemand einen Freundschaftspreis macht UND die Mechanik+Joysticks unverändert verwendet werden können.
Neu Gier schrieb: > Du solltest noch prüfen, wie der DC-Motor betrieben wird Um 15.30 Uhr kommt der Kollege mit dem Oszilloskop. Neu Gier schrieb: > ...wie schwingungsfrei die Mechanik selber ist. Die Achsen sind doppelt kugelgelagert und beginnen (ohne Motor) schon zu drehen, wenn Durchzug ist :-) Neu Gier schrieb: > ...Das wären die Kosten, wenn dir jemand einen Freundschaftspreis macht UND > die Mechanik+Joysticks unverändert verwendet werden können. Das ist doch mal eine Aussage! Eine Hausnummer, an der man sich orientieren kann. Vielen, vielen Dank. Ob ich die Steuerung so übernehmen möchte, steht noch in den Sternen. Sie ist weder sehr handlich, noch kann man die Joystick-Bewegung richtig "fühlen". Auch würde ich gerne alternativ Potis zur Verfügung haben, da diese nicht zurück in die Null-Stellung springen und man auch gleichmäßiger drehen kann. Da nicht alle Drehungen mit Maximal-Ausschlag durchgeführt werden, ist die Joystick-Steuerung ziemlich "wackelig". Vielleicht benötige ich aber auch nur "richtige" Joysticks mit entsprechendem Druck.
Laut Oszilloskop-Inhaber kommt am Motor Gleichspannung an. Er rief spontan einen Modellbau-Spezi an, der am Montag mit Servomotoren vorbei kommen wird. Da wir keinerlei Anhaltspunkte zur momentanen Getriebeübersetzung haben, würde er versch. Dinge probieren. Bin gespannt.
Dirk Razzia schrieb: > Da wir keinerlei Anhaltspunkte zur momentanen > Getriebeübersetzung haben Dirk Razzia schrieb: > Angetrieben wird der Head von folgenden Motoren: > http://www.servocity.com/html/20_rpm_precision_gea... Wenn es sich wirklich um die von dir verlinkten Getriebemotoren handelt, so haben diese eine Untersetzung von 150:1.
Huch, ja sicher! Auf die Idee, einfach in den Specs nachzulesen, bin ich gar nicht gekommen :-) Danke!
Hi >Wenn es sich wirklich um die von dir verlinkten Getriebemotoren handelt, >so haben diese eine Untersetzung von 150:1. Für die Gesamtuntersetzung fehlt aber noch die Untersetzung des Zahnriemenantriebs. MfG Spess
kukuk schrieb: > 150:1 hat das Dings niemals ! kukuk schrieb: > ich glaube ich spinne ? Du hast Recht, du spinnst!
Hi, was du brauchst is nen Regler auf die Geschwindigkeit. Was aber auch heisst, dass du Encoder brauchst. Fraglich ist, ob du mit so einem günstigen Gerät weiterkommst. http://de.wikipedia.org/wiki/Servoantrieb Schau mal hier: http://www.camblock.com Viele Grüße Janis
Janis T. schrieb: > Schau mal hier: > http://www.camblock.com Großartig. Leider preislich jenseits von Gut und Böse. Allerdings sind die Attribute, wie z.B. die Start/Stopp-Rampen regulieren zu können, schon erstrebenswert. Da dieser Remote Head auch Zeitraffer-Aufnahmen unterstützt, gehe ich mal davon aus, dass er mit Schrittmotoren angetrieben wird. Diese anzusteuern, soll aber immens aufwendig sein, weshalb ich erstmal Servomotoren ausprobieren möchte. Andere, ebenfalls hochpreisige Edelprodukte, werden u.a. auch mit Servomotoren ausgeliefert, sodass ich davon ausgehe, mit ihnen zum gewünschten Ergebnis kommen zu können.
Dirk Razzia schrieb: > unterstützt, gehe ich mal davon aus, dass er mit Schrittmotoren > angetrieben wird. Diese anzusteuern, soll aber immens aufwendig sein, Ach, so schlimm ist das nicht. Dein Hauptproblem ist, dass es mit dem Austausch oder Umbau der Motoren nicht getan ist. Man muss die Beschleunigungscharakteristik der ganzen Bewegung umprogrammieren. Dazu muss man aber in die Steuerung heineingehen und dazu braucht man wieder sinnvollerweise das bisherige Programm. Ich schätze mal, dass es im Grunde darauf hinauslaufen wird, die Steuerung selbst über Bord zu werfen. Ob dann zusätzlich auch noch ein Austausch der Motoren notwendig ist, weil man bei dem was du anscheinend willst, exzellente kontrollierte Langsam-Dreh-Eigenschaften braucht (welche für einen Schrittmotor überhaupt kein Problem darstellen), ist so (für mich) nicht abschätzbar. Kann deine Steuerung eigentlich auch nach programmierter Vorgabe eine Bewegung durchführen und hast du dort das gleiche Problem?
Hi, du wirst um ein paar tausend Euro nicht rum kommen. http://ditogear.com http://kesslercinedrive.com Und Schrittmotoren sind nicht das non-plus-ultra. DC / BL mit Getriebe und Encoder (ideal wären absolute Encoder) sind dafür besser geeignet. Du hast nen gut fahrenden VW Polo gekauft, erwartest aber nen Porsche Panamera. Wenn du so hohe Anforderungen hast, musst du die auch bezahlen. Viele Grüße Janis
Angehängte Dateien:
-

move.png
3,3 KB
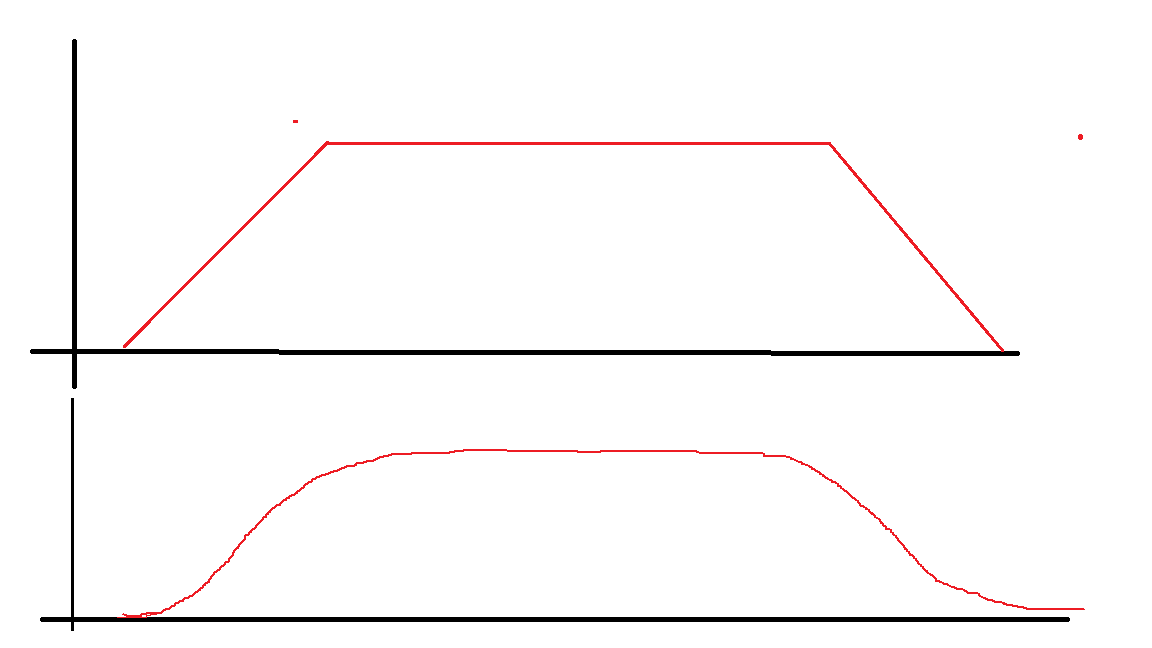
Karl Heinz Buchegger schrieb: > Dirk Razzia schrieb: > >> unterstützt, gehe ich mal davon aus, dass er mit Schrittmotoren >> angetrieben wird. Diese anzusteuern, soll aber immens aufwendig sein, > > Ach, so schlimm ist das nicht. > > Dein Hauptproblem ist, dass es mit dem Austausch oder Umbau der Motoren > nicht getan ist. Man muss die Beschleunigungscharakteristik der ganzen > Bewegung umprogrammieren. Konkret. Die Geschwindgkeitsverteilung darf nicht so wie im oberen Teilbild aussehen, sondern muss so realisiert sein wie im unteren Teilbild (die Knubbel und Ausreisser bitte Ignorieren. Freihand ist ein ein saubere Kurve mit dem Touchpad schwer zu zeichnen) Die Geschwindigkeit muss aus dem Stand nur langsam zunehmen, weil der zulssige Beschleunigungswert langsam und kontinuierlich gesteiegert wird. Genauso muss die Beschleunigung vor erreichen der Endgeschwindigkeit wieder kontinuierlich zurückgenommen werden, damit sich die Geschwindigkeit langsam an die gewählte Endgeschwindigkeit anpasst. Kurz gesagt: Jeden Knick in der Geschwindigkeitskurve im oberen Teilbild, ist ein 'Ruckler', den du bemängelst, weil sich Veränderung der Geschwindigkeit dort ruckartig und schlagartig verändert. Was man benötigt ist, wie MaWin schon gesagt hat, eine Kurve in der Geschwindigkeit, welche C2-kontinuierlich ist. D.h. keine Sprünge in der ersten und zweiten Ableitung. Nur dann wird es gleichmässig und ohne Sprünge. Da du die Bewegung dann auch noch am Joystick hängen haben willst, macht die Sache insbesondere beim Bremsen nicht einfacher. Denn man benötigt einen gewissen 'Vorlauf' um dann langsam und gleichmässig sich auf die Zielposition einzubremsen. Daher auch die Frage, ob deine Steuerung ausschlieslich und nur mit dem Joystick zur Bewegung veranlasst werden kann. Denn eigentlich sollte man erwarte, dass man der Steuerung mit dem Joystick die Endpositionen zeigt, noch eine Angabe über die zu fahrende Geschwindigkeit trifft und dann rechnet die Steuerung erst mal, bestimmt sich die untere Kurve und fährt dann die Bewegung perfekt von der Startposition in die Endposition.
Hallo Karl-Heinz, da muss ich dir wiedersprechen. Jeder "Sprung" in der Geschwindigkeit ist ein Ruckler. Beschleunigung -> unendlich Die erste Kurve sollte völlig ausreichend sein. AVR446: http://fab.cba.mit.edu/classes/MIT/961.09/projects/i0/doc8017.pdf Viele Grüße Janis
Janis T. schrieb: > Hallo Karl-Heinz, > > da muss ich dir wiedersprechen. > Jeder "Sprung" in der Geschwindigkeit ist ein Ruckler. Beschleunigung -> > unendlich > Die erste Kurve sollte völlig ausreichend sein. Exakt. Genau deswegen werden Splines ja auch im Autobau NIHCT auf C2-Kontinuität ausgelegt, weil es ja keinem auffällt, wenn sich der Krümmungsradius in einem Blech sprunghaft verändert. :-) Das sieht man ALLES, wenn man empfindlich ist. Und wenn ich mir das von ihm gegebene Video ansehe, dann ist er das. Von Rucklern kann ich da nämlich nicht viel entdecken.
Janis T. schrieb: > Schau mal hier: > http://www.camblock.com Das ist ja der reine Wahnsinn: während der Fahrt werden die Kameras getauscht! Laßt doch bitte die Knüppel im Sack, anstatt sie zwischen Dirks Beine zu werfen. Er braucht einen Antrieb, der ruckelfrei und bei Bedarf auch schnell läuft. Die Regelung der Fahrt erfolgt per Augen im Kopf und Fingern am Joystick. Die absolute Geschwindigkeit und die Position sind zunächst unwichtig. Wichtig ist allein, dass der Antrieb unter allen Laständerungen stabil bleibt. Da hier in einem Zwischenschritt die Geschwindigkeit in Form einer Gleichspannung vorliegt, könnte man diese filtern oder integrieren, um stabile Beschleunigungen zu realisieren. Ein µC bietet hier beste Dienste.
Mein Gott!!!! Erst hab ich gelesen und dann die Bilder gesehen. Unglaublich!!!! Ich habe weder studiert noch will ich da etwas rechen, aber allein die Bilder sagen doch alles. Hebelarm, Trägheit der Masse, mechanische Dämpfung, das alles sind die Stichworte hierfür. Wenn ich diese Geschwindigkeit erreichen will, dann sollten die Motoren schon mal doppelt so groß sein und Zahnriemen???? Da hast du doch schon dein Rucken. Die Massen mit den Auslegern und so mickerige Zahnriemen, von den mickrigen Motoren mal ganz zu schweigen. Das mag ja alles funktionieren, aber nicht für die gestellten Ansprüche. Die Steuerung (wenn ich das richtig sah) wird mit 5 Ampere abgesichert. Wie sollen die Motoren denn das mit dem bisschen Leistung richtig schaffen. Da ist jede Diskussion überflüssig und eine völlig neue Konstruktion nötig. Sieht ja schick aus und ist sicher ein nettes Spielzeug, aber was du da brauchst, das fängt nicht unter einer "5" vorne an.
Frank O. schrieb: > Hebelarm, Trägheit der Masse, mechanische Dämpfung, das alles sin die > Stichworte hierfür. Nicht zu vergessen: Sonnenaufgang und Mondphasen! Schön, dass wenigstens du alle Parameter kennst. Achso, deine ! und ? Tasten prellen.
Neu Gier schrieb: > Frank O. schrieb: >> Hebelarm, Trägheit der Masse, mechanische Dämpfung, das alles sin die >> Stichworte hierfür. > > Nicht zu vergessen: Sonnenaufgang und Mondphasen! Auch wichtig!!! :-) > Schön, dass wenigstens du alle Parameter kennst. Nein, nicht mal meine kenne ich alle. > > Achso, deine ! und ? Tasten prellen. Und "Tassen prellen" Der Motor macht gerade mal 120 pro Sekunde und wenn dann noch die Untersetzung mit dem Zahnriemen dazu kommt ... lässt sich so nicht realisieren. Ich denke da helfen keine Umbaumaßnahmen. Das bisschen Blech kann man dann auch neu nehmen und völlig neu konstruieren. Beim Fernsehen hab ich schon solche ähnlichen Sachen gesehen, die waren fünf mal so groß wie die zu bewegende Kamera.
Janis T. schrieb: > Schau mal hier: > http://www.camblock.com PRICE LIST Pan/Tilt kits start at $8,990 US Dolly only kit (includes one camBLOCK) start at $7,200 Full Three Axis kits starting at $17,000. Please contact us for price quotes. Lag ich doch gar nicht so schlecht mit meiner Einschätzung des Preises. Sollte man doch galt mal überlegen in diese Sache ein zu steigen. Steuerung bräuchte ich nicht mal bauen, weil ich da schon was weiß.*grins* Können die alles und auch mit Rampen.
Frank O. schrieb: > Ich denke da helfen keine Umbaumaßnahmen. Das bisschen Blech kann man > dann auch neu nehmen und völlig neu konstruieren. Unsinn. Ich war selber skeptisch, was die Mechanik, Lagerung und den Leichtlauf des Kopfes betrifft. Aber da gibt es nichts zu optimieren und es ist erstrecht nichts in Eigenproduktion besser zu bauen. Ziemlich durchdacht und lasttauglich. Karl Heinz Buchegger schrieb: > Daher auch die Frage, ob deine Steuerung ausschlieslich und nur mit dem > Joystick zur Bewegung veranlasst werden kann. Ich möchte diese Steuerung nicht unbedingt behalten. Ideal wären noch zusätzliche Potis, die ich alternativ zu den Joysticks nutzen könnte, weil sie nicht automatisch in Null-Stellung zurück springen, wenn man sie los lässt. Aber ich glaube, das ist das geringste Übel, wenn man erstmal eine präzise Steuerung gefunden hat. Denn das Problem ist ja auch, als Steuermann nicht zu wissen, wann die Drehung beginnt. Im Video sieht man, dass der Joystick gekippt wird aber der Startpunkt nicht fühl- oder sichtbar definiert ist. Schon allein dafür brauche ich eine sanfte Anfahrt und evtl. "Präzisions-Joysticks", falls es sowas gibt. Das hat auch nichts mit "empfindlich" zu tun. Es geht nur nicht, dass man 3 Std lang versucht, eine Standbohrmaschinen-Präsentation mit einer harmomischen Kamerafahrt mit Kran und Kopf einzuleiten, und man nicht in der Lage ist, das Motiv (Bohrfutter/Bohrer) während der Vorbeifahrt zentriert im Bild zu halten, weil die Kamera entweder zu früh oder zu spät dreht. Getoppt vom ruckeligen Anfahren. Das steigert sich ja schon dadurch, dass man beginnt, den Joystick schneller zu kippen, wenn man merkt, dass der Drehstart-Zeitpunkt vorüber ist. Wir waren fünf Personen und keiner war zufrieden. Alle bemängelten das Ruckeln und keiner traf den exakten Zeitpunkt des Drehbeginns. Vorher hielten mich alle für zu dämlich, den Kopf richtig zu steuern :-) Neu Gier schrieb: > einen Antrieb, der ruckelfrei und bei Bedarf auch > schnell läuft. > Die Regelung der Fahrt erfolgt per Augen im Kopf und Fingern am > Joystick. Die absolute Geschwindigkeit und die Position sind zunächst > unwichtig. Genau so. Neu Gier schrieb: > Wichtig ist allein, dass der Antrieb unter allen Laständerungen stabil > bleibt. Da hier in einem Zwischenschritt die Geschwindigkeit in Form > einer Gleichspannung vorliegt, könnte man diese filtern oder > integrieren, um stabile Beschleunigungen zu realisieren. > Ein µC bietet hier beste Dienste. Ich habe zwar keine Ahnung aber es klingt kompetent :-) Werde morgen mal mit dem Modellbau-Menschen sprechen. Danke schon mal!
Neu Gier schrieb: > Frank O. schrieb: >> Der Motor macht gerade mal 120 pro Sekunde und > > Brötchen oder Eierkuchen? Darf ich mir was aussuchen? Im Kopf hatte ich Umdrehungen und vermutlich löschte ich sie mit dem Touchpad auf meinem Netbook. Passiert schon mal beim Schreiben, dass ich mit dem Daumen das Pad erwische und ruck zuck ist was weg.
Hallo "Neu Gier" > Du solltest noch prüfen, wie der DC-Motor betrieben wird: mit varibaler > Gleichspannung oder per PWM (pulsweiten moduliertes Rechtecksignal). Ohne PWM-Ansteuerung kann das natürlich nichts werden. Das Video überrascht mich da nicht wirklich. Ist der Kopf vielleicht eher für die Positionierung bei Einzelbildaufnahmen gedacht? > Eine 'flüssige' Bewegung bekommt man wohl nur mit einen > Schrittmotor+Getriebe (oder auch BLDC-Motor) hin. So ein Unsinn. Ob das ganze flüssig läuft oder nicht hat mit der Motortechnologie frühestens in 2. oder 3. Linie zu tun. Erstmal geht es darum, eine vernünftige Steuerung bzw. besser Regelung aufzubauen. Auch mit einem einfachen DC-Motor kann man halbwegs ruckfrei anfahren, wenn man es richtig macht. > Ich will mal eine grobe Kostenschätzung für den Austausch der DC-Motore > geben: > Schritt- oder BLDC-Motor mit Getriebe rund € 200/Achse; > Ansteuerschaltung für den Motor rund € 100/Achse; > Auswertung/Umwandlung der vorhandenen Steuersignale per µC plus > notwendiges Netzteil (24V bzw. 48V) rund € 400 für beide Achsen. > > Das wären die Kosten, wenn dir jemand einen Freundschaftspreis macht UND > die Mechanik+Joysticks unverändert verwendet werden können. Für den Preis (bzw. weniger) kann ich die nötigen Komponenten für Schrittmotoren sogar ab Lager liefern. Incl. USB-Controller mit Rampensteuerng. Die Frage ist aber, ob das Fahrverhalten mit einem Schrittmotor für die Anwendung ruhig genug ist. Mit freundlichen Grüßen Thorsten Ostermann
Frank O. schrieb: > Neu Gier schrieb: >> Frank O. schrieb: >>> Der Motor macht gerade mal 120 pro Sekunde und >> >> Brötchen oder Eierkuchen? > Darf ich mir was aussuchen? Im Kopf hatte ich Umdrehungen und vermutlich > löschte ich sie mit dem Touchpad auf meinem Netbook. Passiert schon mal > beim Schreiben, dass ich mit dem Daumen das Pad erwische und ruck zuck > ist was weg. Guck mal, ist gar keinem aufgefallen was ich für einen Mist geschrieben hatte. Grad sollte es heißen. Er wollte gern 180 Grad pro Sekunde schaffen und allein der Motor, ohne diese Zahnriemenuntersetzung, schafft nur 120 Grad pro Sekunde. Eine Steuerung hätte ich schon. Ne Curtis kann das. Da kannst du die Beschleunigung und das Abbremsen einstellen.
Thorsten Ostermann schrieb: > Auch > mit einem einfachen DC-Motor kann man halbwegs ruckfrei anfahren, wenn > man es richtig macht. Ja, mach mal! Halbwegs ruckelfrei hat er es doch schon. Oder willst du den kleinen DC-Getriebemotor mit einer Bremse versehen, damit es überhaupt etwas zu reglen gibt? Vielleicht noch mit einer Heizung, damit er auch bei Kälte noch anlaufen kann? Thorsten Ostermann schrieb: > Für den Preis (bzw. weniger) kann ich die nötigen Komponenten für > Schrittmotoren sogar ab Lager liefern. Willst du auf Billigheimer machen? Hast du überhaupt Planetengetrieb im Angebot? Du kannst Dirk alle Komponenten schenken, und sein Problem ist dennoch nicht gelöst. Oder sollte das ein Angebot sein, ihm sein Problem für < €1.000 zu lösen? Oder höre ich nur die Werbetrommel?
Nach halbwegs ruckfrei sieht das Video für mich nicht aus. Den Rest von
Deinem Posting brauche ich wohl nicht zu kommentieren. Ich mache seit
>15 Jahren Antriebstechnik und weis daher wovon ich rede. Das hat nichts
mit Werbetrommel zu tun. Wenn der Motor mit Gleichspannung angesteuert
wird und nicht mit PWM, kann das nicht gehen.
Mit freundlichen Grüßen
Thorsten Ostermann
Thorsten Ostermann schrieb: > Wenn der Motor mit Gleichspannung angesteuert > wird und nicht mit PWM, kann das nicht gehen. kannst du mal bitte sagen warum? Zählt am ende nicht der Effektivwert? PWM führt doch maximal zu zusätzlichen schwingungen wenn sie zu langsam ist. Wenn sie schnell genug ist, kann ein Motor den unterschied zur gleichspannung nicht sehen, weil sie durch die induktiviätig geglättet wird. Sie werden sich wohl etwas dabei gedacht haben ihn mit gleichspannung anzusteuern, ist ja ein zustäzlicher Aufwand und Verlustleistung.
Schau Dir mal eine Motorkennlinie an. Es gibt eine Mindestspannung, die der Motor zum Anlaufen benötigt. Bei Ansteuerung mit PWM liegt man kurzzeitig deutlich darüber und kann so das Reibmoment überwinden. Schwingen kann da normalerweise nichts, weil die Frequenz der PWM um 1-2 Größenordnungen über der mechanischen Eigenfrequenz liegt. Mit freundlichen Grüßen Thorsten Ostermann
Soll man es wirklich schaffen eine Kamerafahrt per Hand hinbekommen? Faulhaber und Maxon haben z.B. Motioncontroller. Die kann man mit einer Software programmieren. Dann machen die Motoren brav immer die gleichen Abläufe. Kann man dann so lange anpassen bis alles passt. Durch die PID-Regler und Beschleunigungs-/Bremmsrampen klappt das auch extra "smooth". Die Dynamik der BLCD-motoren geht so von ~ 10-10000 rpm. Kosten bei FH: um die 200-500 pro Motor, 200 pro Motioncontroller.
Thorsten Ostermann schrieb: > Schau Dir mal eine Motorkennlinie an. Es gibt eine Mindestspannung, die > der Motor zum Anlaufen benötigt. Bei Ansteuerung mit PWM liegt man > kurzzeitig deutlich darüber und kann so das Reibmoment überwinden. aber auch diese Spannung ist einen Effektivwert. Damit egal ob PWM oder Gleichspannung. Sonst müsste der Motor ja bei einem kleinen(kurzer) Impuls ja schon loslaufen. Wenn du noch einen genauere Erklärung hast würde ich mich freuen.
Es ist eben nicht egal. Beim Schrittmotor macht es auch einen Unterschied, ob du 6V Gleichspannung anlegst oder 24V per PWM getaktet. Im zeitlichen Mittel ist das das gleiche, aber auch nur solange der Motor steht. Sobald der Motor dreht und z.B. noch eine Gegen-EMK dazu kommt und die Wicklungsinduktivität eine Rolle spielt, ist das nicht mehr das Gleiche. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Beim Schrittmotor macht es auch einen > Unterschied, ob du 6V Gleichspannung anlegst oder 24V per PWM getaktet. richtig, das ist auch ein andere Motor type und hier ist es wichtig die nächste spule schnell mit strom zu versorgen (entgegen der Induktivität). Diesen Problem gibt es aber beim Gleichstrommotor nicht.
Das war auch nur ein Vergleich, um zu zeigen, dass es eben nicht nur auf den zeitlichen Mittelwert einer Spannung ankommt. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Das war auch nur ein Vergleich, um zu zeigen, dass es eben nicht nur auf > den zeitlichen Mittelwert einer Spannung ankommt. ebend nicht, man könnte den gleichen effenkt auch mit einer ebend so hohen gleichspannung erziehlen. Nur das das ganze aufwendiger ist und aus dem Grund es einfach per PWM gemacht wird.
Nochmal zur Modelleisenbahn zurück: Die Uralt-Motoren diverser Loks, die erst bei Gleichspannungen von ca. 4 bis 5V anlaufen (und dann mit einem Ruck), konnte man mit einer PWM-Ansteuerung richtig "smooth" aus dem Stillstand hochfahren. "Schneckenkriechgang" war ab dato kein Problem mehr. Ansteuerung mit purer Gleichspannung geht nicht für diese Anforderungen. PWM bewirkt, vereinfacht gesagt, ein "Losrüttelmoment". Blackbird
Automatik schrieb: > Soll man es wirklich schaffen eine Kamerafahrt per Hand hinbekommen? > > Faulhaber und Maxon haben z.B. Motioncontroller. Die kann man mit einer > Software programmieren. Dann machen die Motoren brav immer die gleichen > Abläufe. Kann man dann so lange anpassen bis alles passt. Brauche ich nicht, weil wir überwiegend bewegte Objekte filmen. Auch wird der Kran von Hand gesteuert, sodass eine Motion Control des Kopfes alleine zu wenig wäre. Thorsten Ostermann schrieb: > Wenn der Motor mit Gleichspannung angesteuert > wird und nicht mit PWM, kann das nicht gehen. Thorsten Ostermann schrieb: > Für den Preis (bzw. weniger) kann ich die nötigen Komponenten für > Schrittmotoren sogar ab Lager liefern. Incl. USB-Controller mit > Rampensteuerng. Die Frage ist aber, ob das Fahrverhalten mit einem > Schrittmotor für die Anwendung ruhig genug ist. Was schlägst Du konkret vor? Schrittmotoren mit entsprechender Steuerung? Von RE bis zu Dir sind es rund 160km, die ich gerne bereit zu fahren, sofern die Lösung bezahlbar ist. Frank O. schrieb: > Eine Steuerung hätte ich schon. Ne Curtis kann das. Da kannst du die > Beschleunigung und das Abbremsen einstellen. DWas heißt "Steuerung"? Die Platine alleine oder inkl. Joysticks/Potis? Was brauche zusätzlich zu dieser Steuerung: Motoren, Getriebe, Stromversorgung?
Dirk Razzia schrieb: > Frank O. schrieb: >> Eine Steuerung hätte ich schon. Ne Curtis kann das. Da kannst du die >> Beschleunigung und das Abbremsen einstellen. > > DWas heißt "Steuerung"? Die Platine alleine oder inkl. Joysticks/Potis? > Was brauche zusätzlich zu dieser Steuerung: Motoren, Getriebe, > Stromversorgung? Das sind Steuerungen die in EGU's und EGV's verbaut werden. Also in Flurföderzeugen. Das sind die handgeführten Fahrzeuge mit denen die Bierpaletten im Getränkemarkt transportiert werden. 24 Volt ist nötig und 5Volt Regelbereich ist für den Fahrgeber nötig. Curtis waren zunächst nur für Rollstühle vorgesehen und für die Flurföderzeuge gibt es die um die 20 Jahre. Da kannste dann schon einen "richtigen" Motor nehmen und der merkt dann nicht mal, dass da ne Kamera zu bewegen ist.
Hallo Dirk! > Thorsten Ostermann schrieb: >> Für den Preis (bzw. weniger) kann ich die nötigen Komponenten für >> Schrittmotoren sogar ab Lager liefern. Incl. USB-Controller mit >> Rampensteuerng. Die Frage ist aber, ob das Fahrverhalten mit einem >> Schrittmotor für die Anwendung ruhig genug ist. > > Was schlägst Du konkret vor? Schrittmotoren mit entsprechender > Steuerung? Von RE bis zu Dir sind es rund 160km, die ich gerne bereit zu > fahren, sofern die Lösung bezahlbar ist. Zum Beispiel, ja. 375 oz-in sind etwa 2,65Nm. Da könnte man z.B. einen Sanyo Denki 103H7823-1710 mit 2,7Nm bei 4A verwenden. Als Ansteuerung dann je Motor eine DS3044, die man so parametriert, dass ein analoges Eingangssignal in eine Position umgesetzt wird. Beim Einschalten muss man ggf. noch eine Referenzierung machen. Zu prüfen wäre lediglich, ob der Motorlauf ruhig genug ist. Evtl. kann man die Motoren auch 2:1 über Zahnriemen anbinden. Schneller als die 20 Upm des DC-Motors ist der Stepper dann immernoch, wird aber durch den Zahnriemen in Hinblick auf mögliche Schwingungen besser von der Last bzw. der Kamera entkoppelt. Da ist man mit 496 EUR (incl. MwSt., zzgl Versand) fertig und hat 2 Endstufen, 2 Motoren und einen Programmieradapter. Wenn ich auch das Programm erstellen soll, kommt für die Programmierung noch ein bisschen oben drauf. Alles weitere gerne per Mail, das wird jetzt doch etwas zu kommerziell. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > die man so parametriert, dass ein analoges > Eingangssignal in eine Position umgesetzt wird. Er braucht aber eine Geschwindigkeit zum Eingangssignal, nicht eine Position. Ferner muß die Drehrichtung spannungsgesteuert (per Joystick) umkehrbar sein. > Da ist man mit 496 EUR (incl. MwSt., zzgl Versand) fertig und hat 2 > Endstufen, 2 Motoren und einen Programmieradapter. Was ist mit der Hutschiene, mit dem Gehäuse, dem Netzteil (18VDC ?), den Kabeln? Auf ein 5:1 - 10:1 Getriebe für den Schrittmotor würde ich auch nicht verzichten. Das ganze ist eine bruchstückhafte technische Lösung aber keine praktische. Meine Meinung.
Hallo "Neu Gier" >> die man so parametriert, dass ein analoges >> Eingangssignal in eine Position umgesetzt wird. > > Er braucht aber eine Geschwindigkeit zum Eingangssignal, nicht eine > Position. Ferner muß die Drehrichtung spannungsgesteuert (per Joystick) > umkehrbar sein. Ist auch kein Problem. Dafür sind die Dinger ja programmierbar. >> Da ist man mit 496 EUR (incl. MwSt., zzgl Versand) fertig und hat 2 >> Endstufen, 2 Motoren und einen Programmieradapter. > > Was ist mit der Hutschiene, mit dem Gehäuse, dem Netzteil (18VDC ?), den > Kabeln? Auf ein 5:1 - 10:1 Getriebe für den Schrittmotor würde ich auch > nicht verzichten. > Das ganze ist eine bruchstückhafte technische Lösung aber keine > praktische. Kommt drauf an, was gefragt ist. Die genannten Maxxon-Motoren mit Controller kommen auch ohne Gehäuse, mechanische Anpassung usw. Und in deiner ersten Kostenschätzung war das auch alles nicht drinn. Warum beschwerst du dich jetzt, dass ich es nicht mit einrechne? Und ein Getriebe würde ich dem Schrittmotor nur spendieren, wenn es technisch sinnvoll ist. Z.B. wenn die Massenträgheit der Last besonders groß ist. Um das beurteilen zu können, muss man aber die Mechanik genau kennen. Ansonsten wäre ein Getriebe rausgeworfenes Geld. Selbst wenn man den Motor etwas kleiner wählen könnte, wäre das unterm Strich einige Hundert EUR teurer. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Und in deiner ersten Kostenschätzung war das auch alles nicht drinn. Doch, doch. Daher auch die hinreichend hohen Kosten. > Warum beschwerst du dich jetzt, dass ich es nicht mit einrechne? Dirk ist mit einem Haufen an Einzelteilen nicht geholfen. Sein eigentliches Problem ist nicht gelöst. > Und ein Getriebe würde ich dem Schrittmotor nur spendieren, wenn es > technisch sinnvoll ist. Z.B. wenn die Massenträgheit der Last besonders > groß ist. Um das beurteilen zu können, muss man aber die Mechanik genau > kennen. Dann sieh dir mal das Foto der Mechanik an. Die (vermutlich) schwere Kamera ist an einem Arm montiert und der untere Motor muß alles zusammen bewegen. Da würde ich mit Drehmoment nicht geizen. Ein kleinerer Motor mit Getriebe und höherer Drehzahl kann ruhiger laufen, als ein direkter Antrieb mit einem 'dicken' Motor. Dieser könnte die Kamera zwar mit 10U/s drehen, was aber garnicht gefordert ist. > Selbst wenn man den Motor etwas kleiner wählen könnte, wäre das unterm > Strich einige Hundert EUR teurer. Dann sieh dir auch die Getriebemotore bei nanotec an. Es kostet das, was es kostet. Für mich im Vordergrund steht eine funktionierende Lösung und nicht der Zusammenbau von Komponenten, die ich gerade im Regal habe. (Ich habe einige Sachen im Regal ;-) Wenn du Dirk eine passende Lösung zusammenbauen würdest, hätte ich doch garnichts einzuwenden. Wichtig aber ist, dass Alles zusammen zu handhaben und bedienbar ist.
Ich würde vorschlagen, du überläst es Dirk festzulegen, was er braucht und was nicht. Bisher hat er sich noch nicht dazu geäußert, was er genau haben will. Wir haben hier bisher erstmal über die technische Lösung des Antriebsproblems gesprochen, nicht über ein Komplettsystem. Oder irre ich mich da? Ein Rund-um Sorglos Paket aus dem Regal wird Dirk kaum finden, und wenn dann liegt das im deutlich 4-stelligen Bereich. Wenn er mit dem Aufbau Geld verdienen will, ist er vielleicht bereit, das auszugeben. Wenn das aber eine Hobby-Anwendung ist (wie bei den meisten Anfragen hier), wird er sicherlich das eine oder andere selbst machen wollen, weil ihm das sonst zu teuer wird. Ich kann die genannten Komponenten auch auf Wunsch in ein Gehäuse einbauen und Schrittmotoren mit Getriebe liefern. Aber dann kommt man halt nicht mehr mit 500 EUR hin. Vielleicht hast du mit dem Getriebe sogar Recht, so genau habe ich mir die Mechanik noch nicht angesehen. Das ist aber keine Frage des Drehmoments, sondern des Massenträgheitsverhältnisses von Last und Motor. Und um das zu beurteilen braucht es mehr als ein Foto. Das Drehmoment bringt der von mir genannte Motor auch ohne Getriebe. Ich wette aber mir dir, wenn ich einen Preis für ein elektrisch anschlussfertiges Komplettsystem in den Raum geworfen hätte, wären direkt wieder 10 Beiträge gekommen, die sich über den Preis entrüstet hätten, weil man die einzelnen Komponenten ja beim Händler XY oder beim Chinesen bei eBay viel billiger bekommt... Mit freundlichen Grüßen Thorsten Ostermann
Noch etwas. Da wir hier nicht im SPS Forum sind, würde ich keine 'multifunktionalen' Controller mit DC-Eingang verwenden. Die sind zwar gut, um bei einem Förderband die Geschwindigkeit per Poti einzustellen, aber hier zu wenig flexibel. Zur Ansteuerung reicht eine Baugruppe/IC, die Takt- und Richtungssignale verarbeitet und auch 1/8 oder 1/16 Schritt erzeugt. Damit hat man dann auch die rel. Position im Griff. Für einen Elektroniker wäre es dann ein Einfaches, per STM32F4 Discovery den Joystick auszuwerten und per Timer die Taktsignale zu generieren. Damit hätte man alle Freiheiten, die Mechanik bedienbar zu gestalten (Nullpunkt + 'tote Zone' vom Joystick berücksichtigen, Glättung bei ruckartigen Bewegungen, Anpassung von Kennlinien, spätere programmierbare Abläufe). Dieses Spielerische würde mich an der Geschichte reizen.
Ich hab mir das gerade nochmal angesehen. Da ist ja schon eine Riemenstufe mit ca. 1:3 oder 1:4 vorhanden. Dann sollte man gut ohne Getriebe auskommen. Ich habe vor einigen Jahren mal ein Projekt mit einem Hersteller für Überwachungskameras gemacht. Da waren die Gehäuse (für den Außenbereich mit Heizung usw.) auch relativ schwer, trotzdem reichte ein Nema23-Motor mit <2Nm ohne Getriebe. Mit freundlichen Grüßen Thorsten Ostermann
Vielen Dank für Eure Unterstützung! Mein Problem ist, dass ich nicht weiß, was in dem vorgeschlagenen 500EUR-Paket enthalten ist und was ich zusätzlich, neben Fachwissen, benötige. Kollegen von mir können zwar (fast) alles zusammenbauen aber haben eben keine Ahnung von Motoren. Weder von Marken noch von Getrieben oder komplexen Steuer-Programmierungen. Deshalb müssten die Einzelteile zumindest den Anforderungen entsprechen und die Programmierung entweder über eine (für allg. E-Tchniker) verständliche Software vorzunehmen oder die Steuerung schon programmiert sein. Ebenso sollte die Frage, ob Getriebe und wenn ja, welche Untersetzung, geklärt werden. Ich versuche dafür erstmal herauszufinden, wieviel Kraft nötig ist, um die max Masse (ca 12kg) an der senkrechten Achse mit dem vorhandenen Zahnrad zu bewegen. Mit den Daten kann man dann doch die passenden Motoren/Getriebe auswählen.
Da ich partout keine Zugwaage bekommen kann, nahm ich eine Küchenwaage und maß mit dieser. Waage u Kopf wurden mit einer Schnur verbunden. Ein Schnur-Ende am Zahnrad des Kopfes und das andere an zwei Seiten des Waage-Tellers (damit nichts verkantet), dann die Waage mit unterschiedlichem Kraftaufwand vom Kopf weggezogen und die Schnur am (liegenden) Zahnrad von "12 Uhr" (hinten) auf "6 Uhr" (vorne) gezogen, wie beim Rasenmäherstart. Leider kann ich meinen Kraftaufwand nicht messen, sodass die Ergebnisse mit Vorsicht zu genießen sind. Allerdings sind die Werte bei allen Wiederholungen ziemlich identisch: -Sehr langsam gezogen, minimalster Kraftaufwand bis zur Bewegung: <50g (auf der Küchenwaage eigentlich nicht messbar) bis -sehr schnell gezogen, 180°-Drehung in ca 1-2 Sek: rund 2500 g Komisch ist: das gilt für den "nackten" Kopf als auch für 4kg Gewicht. Es war mit bloßem Auge kein Unterschied festzustellen.
Hallo Dirk! Wenn der alte Motor kräftig genug ist, den Aufbau zu bewegen (vom Ruckeln mal abgesehen), hast du doch eine Abschätzung nach oben für das nötige Drehmoment. Mit freundlichen Grüßen Thorsten Ostermann
Natürlich geht es auch per Gleichspannung, aber PWM hat weniger Verlustleistung. Letztlich erzeugt der PWM Impuls an der Induktivität des Motors auch nur einen mittleren Motorstrom wie es sonst die Gleichspannung täte. Entscheidend ist eher die echte Regelung, also ein Encoder dessen Bewegung man per Elektronik steuert und die passende Rampe, die auch in der Ableitung stetig sein muss. Und wenn dann der Arm noch wackelig ist wird das zu einem sehr schweren aber schaffbaren Regelungsproblem.
Was nun? Der Eine sagt so, der Andere so... und mir fehlt das Wissen, um beurteilen zu können, was mich ans Ziel bringt. Die Komponenten alleine nützen mir jedenfalls nicht viel. Ich habe zwar E-Techniker im Bekanntenkreis aber keinen, der sich näher mit Antrieben und Steuerungen befasst. Vielleicht hat Thorsten recht und ein Forum ist zu öffentlich für konkrete Zahlen. Wer lieber per Email kommunizieren mag: razzia-bei-wellenform-punkt-tv
500km gen Osten in der Hauptstadt. Das ist zu weit weg! Dein Problem ist zwar zu 80% technischer Natur, aber erst die letzten 20% sind entscheidend, ob es für dich brauchbar ist oder nicht. Diese letzten 20% enthalten auch dir bislang nicht bekannte Anforderungen und lassen sich nur interaktiv vor Ort erledigen. Es tut mir Leid, aber erfahrungsgemäß ist mir der Aufwand dafür zu groß.
Hallo "Neu Gier"! > Da wir hier nicht im SPS Forum sind, würde ich keine 'multifunktionalen' > Controller mit DC-Eingang verwenden. Die sind zwar gut, um bei einem > Förderband die Geschwindigkeit per Poti einzustellen, aber hier zu wenig > flexibel. Zu wenig flexibel? Die Dinger sind frei programmierbar, im Rahmen des Befehlssatzes und der verfügbaren I/Os. Noch mehr Flexibilität wird hier nicht gebraucht und würde die Lösung nur unnötig kompliziert machen. > Für einen Elektroniker wäre es dann ein Einfaches, per STM32F4 Discovery > den Joystick auszuwerten und per Timer die Taktsignale zu generieren. > Damit hätte man alle Freiheiten, die Mechanik bedienbar zu gestalten > (Nullpunkt + 'tote Zone' vom Joystick berücksichtigen, Glättung bei > ruckartigen Bewegungen, Anpassung von Kennlinien, spätere > programmierbare Abläufe). > > Dieses Spielerische würde mich an der Geschichte reizen. Eben wolltest du noch eine fertige quasi industrietaugliche Lösung, jetzt redest du wieder vom Basteln?! Da der OP das nicht selbst kann, müsste er jemanden dafür bezahlen. Und eine Entwicklung zu starten, wenn es fertige Lösungen gibt, macht bei Stückzahl 1 nun wirklich keinen Sinn. Mit freundlichen Grüßen Thorsten Ostermann
@ Neu Gier: Ich fragte deshalb, weil ich mit dem Kopf bei Thorsten und Dir vorbei kommen wollte, damit Ihr das Ding einfach mal genau ansehen und am besten selber steuern könnt. Ferndiagnosen basieren auf vielen Unbekannten. Außerdem fände ich es irgendwie "unfair", nur noch mit Thorsten zu kommunizieren, da Du ja ebenfalls konkretere Vorschläge hattest. Aber da der Aufwand letzlich zu groß wird, macht es wirklich keinen Sinn, 1000 km zu fahren. Und ich brauche trotzdem kein schlechtes Gewissen zu haben :-) Vielen Dank für Deine Unterstützung! Dirk
Hallo Dirk, es gab mal eine Schreinerei wo der Chef unzufrieden mit den gegebenen Softwaremöglichkeiten war, also stellte er einen Programmierer ein und heute ist es weltweit die führende Firma in diesem Markt. Ich will damit folgendes sagen: Du bist sicher gut in dem was und wie du da filmst, nur die erschwingliche Hardware (obwohl ich das trotzdem schon sehr teuer finde, wenn es nicht richtig funktioniert) ist unzureichend. Versuche dich doch selbst an der Materie und bau dir selbst was. Die dann offenen Fragen werden dir hier sicher beantwortet.
Frank O. schrieb: > Versuche dich doch selbst an der Materie und bau dir selbst was. Die > dann offenen Fragen werden dir hier sicher beantwortet. Frank O. schrieb: > Guck mal, ist gar keinem aufgefallen was ich für einen Mist geschrieben > hatte. Es fällt immer wieder auf, es ist nur zwecklos, etwas dagegen zu unternehmen ;-)
Neu Gier schrieb: > Frank O. schrieb: >> Versuche dich doch selbst an der Materie und bau dir selbst was. Die >> dann offenen Fragen werden dir hier sicher beantwortet. > > Frank O. schrieb: >> Guck mal, ist gar keinem aufgefallen was ich für einen Mist geschrieben >> hatte. > > Es fällt immer wieder auf, es ist nur zwecklos, etwas dagegen zu > unternehmen ;-) Hahaha! Ist aber gemein das aus dem einen Kontext heraus zu reißen und zu einem anderen zusammen zu setzen. Ma gucken, vielleicht kann ich es dir ja heim zahlen.;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.